Механизм второго класса с последовательным выстоем рабочего органа
Номер инновационного патента: 23559
Опубликовано: 15.12.2010
Авторы: Уалиев Заир Гахипович, Уалиев Гахип Уалиевич, Журсенбаев Балахазы Ибраевич
Формула / Реферат
Изобретение относится к машиностроению и может быть использовано в автоматизированных системах (например для автоматической загрузки рабочих машин штучными деталями, а так же в прессах автоматах и т.д.) Механизм может быть использован для замены кулачковых механизмов.
Достигаемый технический результат - упрощение схемы и простота технического исполнения.
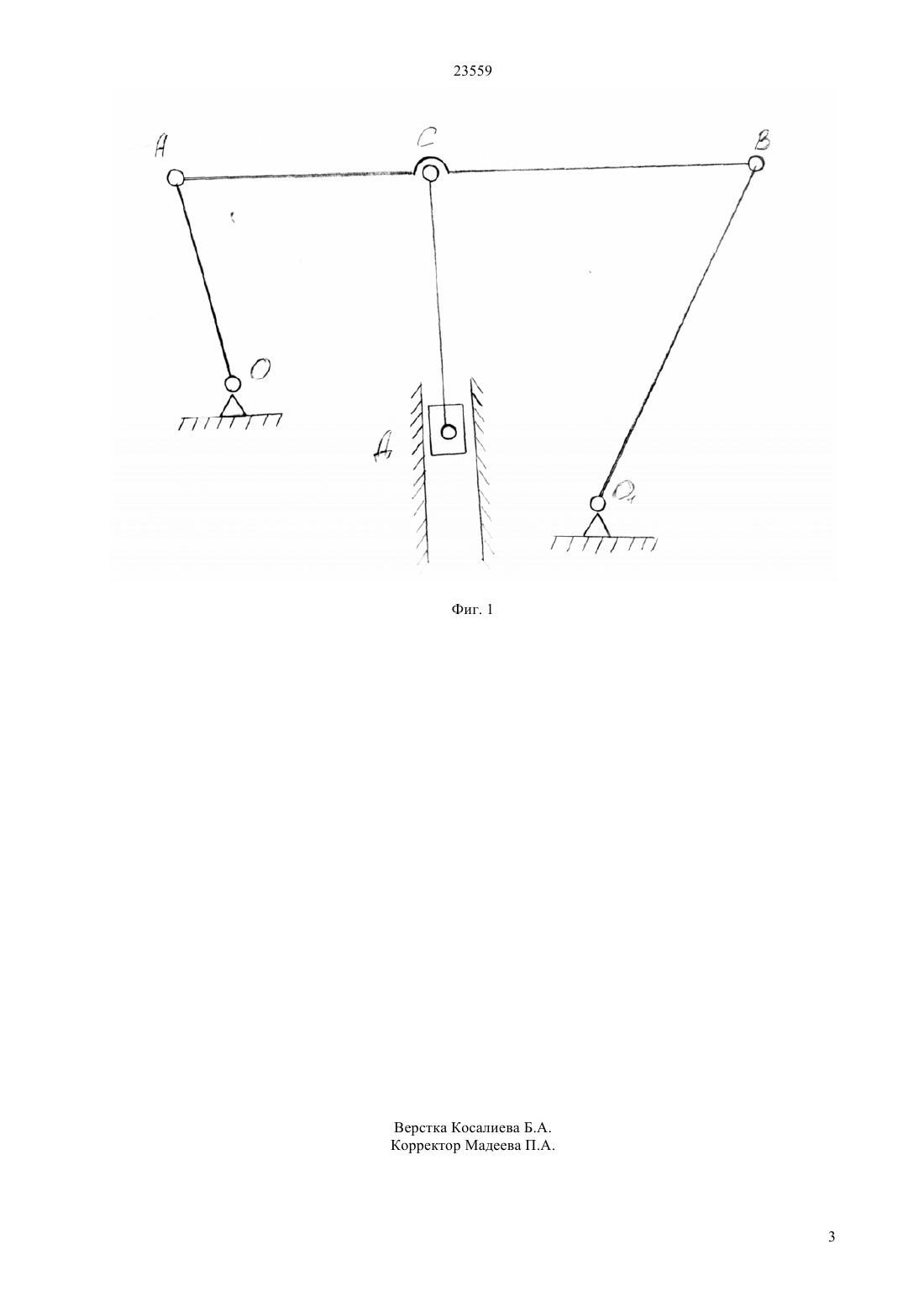
Механизм второго класса с последовательным выстоем рабочего органа, включает стоику, кривошип, цилиндрические шарниры, поводки, выходное звено, один поводок выполненный трехшарнирным и первым цилиндрическим шарниром соединен к кривошипу, а вторым средним цилиндрическим шарниром посредством поводка соединен к выходному звену в виде ползуна направляющая которого жестко закреплена на стойке, а третьим цилиндрическим шарниром к поводку соединенному другой стороной цилиндрическим шарниром к стойке, и образует группу Ассура второго клина.
Текст
(51) 16 21/14 (2010.01) 16 29/00 (2010.01) 16 29/04 (2010.01) КОМИТЕТ ПО ПРАВАМ ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ МИНИСТЕРСТВА ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ИННОВАЦИОННОМУ ПАТЕНТУ рабочих машин штучными деталями, а так же в прессах автоматах и т.д.) Механизм может быть использован для замены кулачковых механизмов. Достигаемый технический результат упрощение схемы и простота технического исполнения. Механизм второго класса с последовательным выстоем рабочего органа, включает стоику,кривошип, цилиндрические шарниры, поводки,выходное звено, один поводок выполненный трехшарнирным и первым цилиндрическим шарниром соединен к кривошипу, а вторым средним цилиндрическим шарниром посредством поводка соединен к выходному звену в виде ползуна направляющая которого жестко закреплена на стойке, а третьим цилиндрическим шарниром к поводку соединенному другой стороной цилиндрическим шарниром к стойке, и образует группу Ассура второго клина.(72) Уалиев Гахип Уалиевич Журсенбаев Балахазы Ибрайович Уалиев Заир Гахипович(73) Республиканское государственное предприятие на праве хозяйственного ведения Казахский национальный педагогический университет им. Абая Министерства образования и науки Республики Казахстан Журсенбаев Балахазы Ибрайович(56) Предварительный патент РК 16003, 16 21/00, 15.07.2005(54) МЕХАНИЗМ ВТОРОГО КЛАССА С ПОСЛЕДОВАТЕЛЬНЫМ ВЫСТОЕМ РАБОЧЕГО ОРГАНА(57) Изобретение относится к машиностроению и может быть использовано в автоматизированных системах (например для автоматической загрузки 23559 Изобретение относится к машиностроению и может быть использовано в автоматизированных системах (например, для автоматической нагрузки рабочих машин штучными деталями, а также в прессах автоматах и т.д.). Механизм может быть использован для замены кулачковых механизмов. Известен механизм пятого класса с последовательными выстоями рабочих органов (ПП РК 7748 Бюл.7 от 15.07.99), который включает механизм пятого класса с последовательными выстоями выходных звеньев, который состоит из кривошипа ОА, к цилиндрическому шарниру А присоединена группа Ассуракласса, которая состоит из звенатреугольного профиля. К цилиндрическому шарниру С присоединен поводок СР, цилиндрической парой Р соединен со звеном РОЕ - первым выходным звеном, которое цилиндрической парой О прикреплено к стойке. Поводок цилиндрической паройи в шарнире К со вторым выходным звеном КО, которое прикреплено к стойке О. На определенных участках при вращении кривошипа ОА выходные звенья КО и РОУ осуществляют последовательно друг за другом длительные остановки. Недостатком данного механизма является то, что одно выходное звено имеет форму треугольного контура и содержит изменяемый замкнутый контур состоящий из пяти звеньев. Получение кинематических и силовых характеристик этого механизма более сложно, чем в предлагаемом механизмекласса. Наиболее близким по технической сущности к изобретению является механизм высокого класса с последовательными выстоями рабочих органов (ПП РК 16003 от 05.05.2005 г.) включающий стойку,кривошип, цилиндрические шарниры, поводки,треугольные контуры, изменяемый замкнутый контур, состоящий из четырех звеньев (группы Ассура четвертого класса), включающий один поводок и выходные звенья в виде поводков. Механизм четвертого класса содержит изменяемый замкнутый контур из четырех звеньев, который состоит из трех треугольных контуров и одного поводка, и выходное звено в виде поводка. Задача изобретения - создать механизм с последовательным выстоем выходного звена, где длительность выстоев можно программировать за счет управляемого движения одного входного звена. Технический результат - упрощение схемы и простота технического исполнения. Технический результат достигается тем, что в механизме второго класса с последовательным выстоем рабочего органа (включающим стойку,кривошип, цилиндрические шарниры, четыре поводка), выходное звено выполнено в виде ползуна и один поводок трехшарнирный, не содержащий треугольные контуры, а также замкнутый изменяемый контур. Предлагаемый механизм второго класса состоит из кривошипа ОА, который вращается с постоянной частотой (об/сек). К цилиндрическому шарниру А присоединена группа Ассура второго класса,которая состоит из трехшарнирного ободка АСВ. К цилиндрическому шарниру В присоединен поводок ВО, а к шарниру С соединен поводок СД. К шарнирусоединено выходное звено ползун,направляющая которого вертикально закреплена на стойке. Предлагаемый механизм работает следующим образом при постоянном вращении выходного звена,выходное звено ползун совершает последовательно остановки. Зафиксируем кривошип ОА в нулевом положении (т.е. угол относительно оси абсцисс О). Далее при вращении кривошипа от 0 до 60 выходное звено ползун движется вертикально снизу вверх. При вращении кривошипа от 60 до 120 выходное звено ползун остается неподвижно в верхнем положении. При вращении кривошипа от 120 до 180 градусов ползун опускается. А при вращении кривошипа от 180 до 360 ползун поднимается. Из выше изложенного видно, что предлагаемый механизм второго класса с последовательным выстоем рабочего органапозволяет совершать последовательные остановки рабочего органа ФОРМУЛА ИЗОБРЕТЕНИЯ Механизм с последовательным выстоем рабочего органа,включает стойку,кривошип,цилиндрические шарниры, поводки, выходное звено, отличающийся тем, что один поводок выполненный трехшарнирным и первым цилиндрическим шарниром соединен к кривошипу,а вторым средним цилиндрическим шарниром посредством поводка соединен к выходному звену в виде ползуна, направляющая которого жестко закреплена на стойке, а третьим цилиндрическим шарниром к поводку соединенному другой стороной цилиндрическим шарниром к стойке, и образует группу Ассура второго клина.
МПК / Метки
МПК: F16H 29/00, F16H 29/04, F16H 21/14
Метки: рабочего, выстоем, второго, механизм, класса, последовательным, органа
Код ссылки
<a href="https://kz.patents.su/3-ip23559-mehanizm-vtorogo-klassa-s-posledovatelnym-vystoem-rabochego-organa.html" rel="bookmark" title="База патентов Казахстана">Механизм второго класса с последовательным выстоем рабочего органа</a>
Механизм высокого класса с последовательными выстоями рабочих органов
Номер предварительного патента: 16003
Опубликовано: 15.07.2005
Авторы: Уалиев Гахип Уалиевич, Кинжебаева Динар Альжановна, Дарханова Камила Асановна, Уалиев Заир Гахипович
МПК: F16H 21/00
Метки: высокого, класса, последовательными, рабочих, органов, выстоями, механизм
Формула / Реферат:
Изобретение относится к машиностроению иможет быть использовано в автоматизированныхсистемах (например, для автоматической загрузкирабочих машин штучными деталями, а также дляизмерения расстояния между заготовками и т.д.).Механизм может быть использован для замены кулачковых механизмов.Достигаемый технический результат - упрощение схемы и выгодность технического исполнения.Механизм высокого класса (фиг. 2) состоит изкривошипа КЕ, который...
Механизм высокого класса с последовательными выстоями рабочих органов
Номер предварительного патента: 7748
Опубликовано: 15.07.1999
Авторы: Нысанбаева Сагадат Саяковна, Рахимов Есентай Рахимович, Тулешев Амандык Куатович, Уалиев Гахип Уалиевич
МПК: F16H 21/40, F16H 21/02
Метки: органов, высокого, рабочих, последовательными, выстоями, механизм, класса
Формула / Реферат:
Изобретение относится к машиностроению и может быть использовано в автоматизированных производственных системах (например, для автоматической загрузки рабочих машин штучными деталями, а также для изменения расстояния между заготовками).Технический результат - расширение функциональных возможностей механизма.Это достигается механизмом высокого класса с последовательными выстоями рабочих органов, включающий стойку, кривошип, выходные звенья,...
Узел крепления стойки рабочего органа почвообрабатывающего орудия
Номер инновационного патента: 21975
Опубликовано: 15.12.2009
Авторы: Кусаинов Руслан Комекович, Буряков Александр Семенович
МПК: A01B 35/22
Метки: орудия, узел, рабочего, органа, почвообрабатывающего, стойки, крепления
Формула / Реферат:
Изобретение относится к сельскохозяйствен-ному машиностроению, в частности к устройствам для крепления стойки рабочего органа почвообрабатывающего орудия, осуществляющее регулировку угла вхождения рабочего органа в почву.Задача изобретения - повышение надежности крепления рабочего органа к раме орудия, упрощение конструкции узла крепления и снижение трудоемкости регулировки положения стойки рабочего орудия.Указанная задача решается тем, что на...
Способ определения сгруживания почвы на поверхности рабочего органа при ее уплотнении
Номер предварительного патента: 16221
Опубликовано: 14.10.2005
Автор: Семибаламут Александр Викторович
МПК: A01B 79/00
Метки: определения, органа, рабочего, почвы, сгруживания, уплотнении, способ, поверхности
Формула / Реферат:
Изобретение относится к сельскому хозяйству,в частности к почвообрабатывающим рабочим органам, предназначенным для уплотнения почвы.Способ заключается в том, что перед проходомуплотняющего рабочего органа по уплотняемомуобъему почвы равномерно распределяют сигнальные элементы, например, крупные семена сельскохозяйственных культур (гороха, пшеницы и др.),раздельно подсчитывают указанные сигнальныеэлементы после прохода уплотняющего рабочегооргана...
Предохранительное устройство трансмиссии рабочего органа землеройной машины
Номер инновационного патента: 21324
Опубликовано: 15.06.2009
Автор: Тогусов Амангельды Курмангажинович
МПК: B60K 28/08
Метки: устройство, предохранительное, органа, машины, землеройной, рабочего, трансмиссии
Формула / Реферат:
Изобретение относится к трансмиссии рабочего органа землеройной машины, в частности предохранительному устройству трансмиссии рабочего органа.Предохранительное устройство выполнено в виде гидромеханического устройства, состоит из крышки предохранительного устройства, подвижного следящего упора с регулировочным винтом, посаженного на ведущий вал раздаточной коробки, профиля на фланце ведомого вала раздаточной коробки, пружины напорной,...
Предыдущий патент: Механизм привода станка-качалки
Следующий патент: Способ транспортирования высоковязкой нефти
Случайный патент: Штамм бактерий Brucella melitensis 0004/H, используемый для приготовления диагностических и профилактических препаратов