Механизм привода станка-качалки
Номер инновационного патента: 23558
Опубликовано: 15.12.2010
Авторы: Уалиев Гахип Уалиевич, Журсенбаев Балахазы Ибраевич, Ибраев Саят Мурат-улы, Тилеубаев Совет, Уалиев Заир Гахипович
Формула / Реферат
Изобретение относится к машиностроению и может быть использовано в автоматизированных системах (например для автоматической загрузки рабочих машин штучными деталями, а так же в прессах автоматах и т.д.) Механизм может быть использован для замены кулачковых механизмов.
Достигаемый технический результат - упрощение схемы и простота технического исполнения.
Механизм второго класса с последовательным выстоем рабочего органа, включает стоику, кривошип, цилиндрические шарниры, поводки, выходное звено, один поводок выполненный трехшарнирным и первым цилиндрическим шарниром соединен к кривошипу, а вторым средним цилиндрическим шарниром посредством поводка соединен к выходному звену в виде ползуна направляющая которого жестко закреплена на стойке, а третьим цилиндрическим шарниром к поводку соединенному другой стороной цилиндрическим шарниром к стойке, и образует группу Ассура второго клина.
Текст
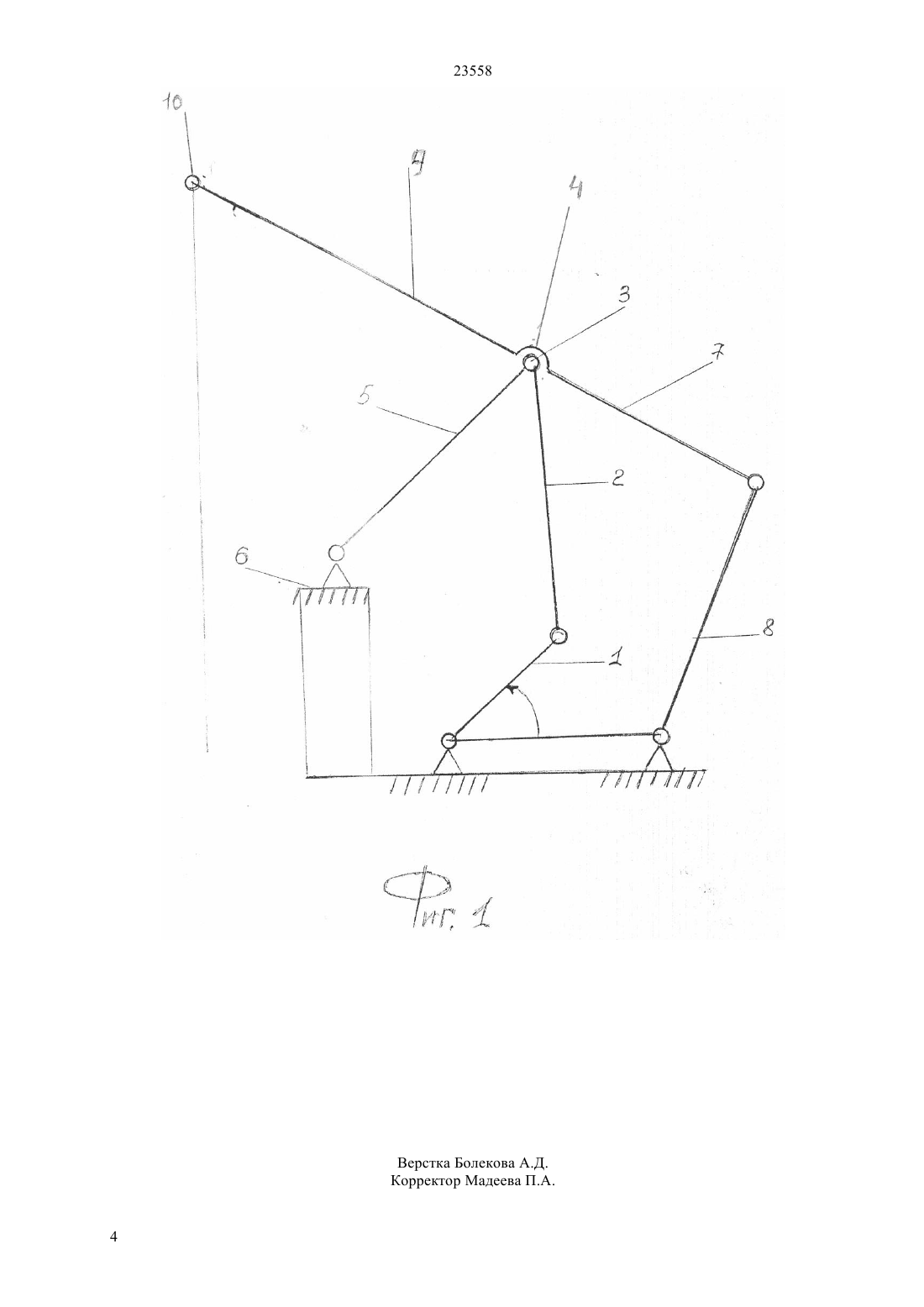
(51) 16 21/04 (2010.01) 16 21/14 (2010.01) 16 21/18 (2010.01) КОМИТЕТ ПО ПРАВАМ ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ МИНИСТЕРСТВА ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ИННОВАЦИОННОМУ ПАТЕНТУ штанговых скважинных насосных установок(ШСНУ) для добычи нефти. Технический результат уменьшение металлоемкости и габаритов механизма привода станка-качалки содержащей кривошипно-шатунную пару, стойку, опору балансира, двуплечий балансир с передним и задним плечом, играющий роль противовеса и выполненный с возможностью изменения длины, определяемой расстоянием от стойки балансира до точки соединения его с шатуном в течение цикла работы механизма,средним шарниром балансир соединен к кривошипно-шатунной паре и посредством дополнительного звена к опоре балансира, а заднее плечо соединено с поводком и образует двухзвенное заднее плечо балансира, причем, поводок шарнирно соединен со стойкой(72) Уалиев Гахип Уалиевич Журсенбаев Балахазы Ибрайович Ибраев Саят Мурат - улы Уалиев Заир Гахипович Тилеубаев Совет(73) Республиканское государственное предприятие на праве хозяйственного ведения Казахский национальный педагогический университет им. Абая Журсенбаев Балахазы Ибрайович(56) Предварительный патент РК 4049, 04 47/02, 16.12.1996(54) МЕХАНИЗМ ПРИВОДА СТАНКА КАЧАЛКИ(57) Изобретение относится к нефтегазовому машиностроению, а именно к нефтепромысловым машинам и оборудованию и может быть использовано в наземном механическом приводе 23558 Изобретение относится к нефтегазовому машиностроению, а именно к нефтепромысловым машинам и оборудованию, и может быть использовано в наземном механическом приводе штанговых скважинных насосных установок(ШСНУ) для добычи нефти. Известен четырехзвенный механизм второго класса привода станка - качалки (СК), содержащий кривошипно-шатунную пару и шарнирно соединенное с ней двуплечее коромысло - балансир,имеющие на переднем плече головку, снабженную гибким промежуточным элементом, соединяющим балансир с точкой подвеса колонны штанг ШСНУ(Молчанов Г.В., Молчанов А.Г. Машины и оборудование для добычи нефти и газа. М Недра,1984, с. 136-138). Данный механизм применяется в наземном приводе СК для преобразования вращательного движения выходного звена трансмиссии в возвратно- поступательное движение точки подвеса колонны штанг. Одновременно им обеспечивается кинематическая связь уравновешивающего устройства с точкой подвеса штанг. Уравновешивающее устройство, в зависимости от способа уравновешивания в данном механизме,выполняется в виде грузов - противовесов,размещаемых на балансире, на кривошипе, на балансире с кривошипом, на шатуне и на специальных приспособлениях типа ложной качалки, представляющей собой двухпроводковую группу, присоединенную шарнирно к балансиру,или зубчатой пары, вращающейся с частотой вдвое большей, чем частота вращения кривошипа. К недостаткам механизма относятся большая металлоемкость, большие габариты и, как следствие, - большая масса что усугубляется применением тяжелых грузов - противовесов и массивного фундамента. Кроме этого,использование грузов противовесов не в полной мере уравновешивает силы и моменты, действующие на редуктор электропривода. Более того, главным недостаткам рассматриваемого механизма привода СК является невозможность реализации в нем требуемого закона движения точки подвеса колонны штанг, и обеспечение благоприятных углов давления т.к. размерные соотношения звеньев механизма ограничены и не дают возможности произвести их необходимый подбор, а также при увеличении хода подвеса штанг увеличиваются габариты. Механизм СК также ненадежен в эксплуатации из-за частых выходов из строя редуктора сальникового штока и других его подвижных частей. Известен шестизвенный механизм второго класса привода СК (Аливердизаде К.С. Приводы штангового глубинного насоса. М Недра, 1973, с. 58-59), полученный присоединением элементов двухповодковой группы к основному четырехзвенному кривошипно-коромысловому механизму в шарнирной точке соединения головки балансира и стойки с таким расчетом, что двухповодковая группа в сочетании с передним 2 плечом балансира составляет приближенно прямолинейно - направляющий механизм. Специальные выполнение головки балансира в виде шарнирного рычажного направляющего устройства обеспечивает прямолинейное движение точки подвеса колонны штанг в данном механизме. При этом прямолинейность движения точки подвеса штанг обеспечивается соответствующим подбором длин звеньев прямолинейно - направляющего механизма головки балансира. Однако в данном механизме привода СК,несмотря на применение специальной головки балансира в виде шарнирно - рычажного прямолинейно - направляющего механизма, не обеспечивается требуемый закон движения точки подвеса штанг и, более того, не исключается использование грузов-противовесов из-за неблагоприятных углов передачи сил возрастают усилия в шарнирах. Поэтому конструкция механизма привода для удержания тяжелых противовесов сочетании с последними имеет большие габариты и массу. Наиболее близким по технической сущности к предлагаемому изобретению является четырехзвенный механизм второго класса привода СК (предварительный патент РК 4049, кл. 04 47/02, 1996), содержащий балансир с головкой с передним и задним плечами, последнее из которых имеет в точке сочленения его с шатуном зубчатый реечный механизм, зубчатое колесо которого выполнено с возможностью движения между неподвижной и подвижной рейками,установленными на балансире между пружинами амортизатора. С точки зрения структурной классификации плоских механизмов в данном изобретении шатун,образующий с задним плечом балансира среднюю вращательную пару двухповодковой группы,заменен зубчатым реечным механизмом,образующим поступательную пару. Здесь в течение одного цикла работы механизма заднее плечо балансира меняется соответственно изменению нагрузки на привод, т.е. с возрастанием нагрузки плечо увеличивается, а со снижением наоборот, уменьшается. Таким образом, изменением плеча балансира в течение одного цикла происходит частичное выравнивание пика крутящего момента на валу кривошипа, а следовательно, и на приводе СК. В данном механизме за счет, частичной замены груза-противовеса балансиром с переменным плечом значительно уменьшается масса и металлоемкость, улучается стойкость механизма к ударным динамическим нагрузкам. Однако выполнение средней пары двухповодковой группы четырехзвенного механизма привода СК в виде зубчатого реечного механизма с пружинными амортизаторами усложняет конструкцию балансира. В результате увеличиваются габариты механизма. Более того,изменение длины заднего плеча балансира не обеспечивает возможность получения, любого требуемого закона движения точки подвеса колонны штанг и благоприятных углов давления. 23558 Анализирую вышеприведенные механизмы привода СК, можно сделать вывод о том,совмещением преимуществ каждого из них в одном механизме привода СК можно достичь более качественного уравновешивания нагрузки на привод. Однако это, в свою очередь, несколько усложнило бы конструкцию механизма СК, сделало бы его металлоемким и крупногабаритным. Более того, при таком условии вопрос реализации любого требуемого закона движения точки подвеса штанг и полного уравновешивания механизма привода СК становился бы еще более сложным. Задачей изобретения является создание механизма привода СК, который обеспечивал бы эффективное уравновешивание нагрузки на привод и реализацию любого требуемого закона движения точки подвеса колонны штанг и передачу сил без использования тяжелых грузов-противовесов. Технический результат снижение металлоемкости и уменьшение габарита привода СК. Это достигается тем, что в механизме привода станка-качалки,содержащем кривошипношатунную пару, стойку, опору балансира, балансир с головкой, средним шарниром, передним плечом и задним плечом, играющим роль противовеса и выполненным с возможностью изменения длины определяемой расстоянием от стойки балансира до точки соединения его с шатуном, в течение цикла работы механизма, средний шарнир балансира и кривошипно-шатунная пара посредством дополнительного звена соединена к опоре балансира, а заднее плечо соединено поводкам и образует двухзвенное заднее плечо балансира,причем поводок шарнирно соединен со стойкой. Сущность изобретения поясняется кинематической схемой привода СК,представленной на фиг. 1 (среднее положение, а верхние и нижние положения указаны штрихами). Механизм привода СК содержит кривошип 1,шатун 2 шарнирно соединенный с одной стороны к кривошипу 1, а с другой стороны к среднему шарниру 3 двуплечего балансира 4. Балансир 4 средним шарниром 3 соединен посредством дополнительного звена 5 к опоре балансира 6, а заднее плечо 7 соединено с поводком 8 и образует двухзвенное плечо балансира. На переднем плече балансира 9 шарнирно закреплена головка 10,причем поводок 8 и кривошип 1 шарнирно соединены со стойкой 11. Соотношения длин звеньев механизма подобраны так, сто в течение одного цикла работы механизма привода СК длина заднего плеча балансира, зависящая от взаиморасположения звеньев 7, 8 меняется, обеспечивая тем самым длину плеча, прямопропорциональную нагрузке на привод,и строго вертикальное перемещение головки 10. Механизм привода СК работает следующим образом. Крутящий момент передается от редуктора (на схеме не показано) к оси кривошипа 1. Вращение кривошипа 1 посредством шатуна 2 передается с одной стороны на дополнительное звено 5, а с другой стороны на двухзвенное заднее плечо балансира состоящее из заднего плеча 7 и поводка 8, при этом дополнительное звено 5 и поводок 8 совершают возвратно - качательное движение по дуге, а головка 10, за которую крепятся колонна штанг, находящаяся на переднем плече совершает прямолинейное возвратнопоступательное движение. С возрастанием нагрузки на привод переменное плечо балансира увеличивается,а со снижением нагрузки уменьшается. Таким образом, предложенное изобретение значительно снижает металлоемкость механизма привода СК (т.к. не использует грузы противовесы,т.е. является безбалансирным), уменьшает габариты в два раза как по высоте так и по длине сохраняя длину хода головки, что делает его компактным,увеличивает угол передачи сил, а также позволяет реализовать требуемый вид закона прямолинейного движения головки подвеса колонны штанг самим механизмом, т.е. без использования специальных направляющих устройств на головке балансира. ФОРМУЛА ИЗОБРЕТЕНИЯ Механизм привода станка-качалки, содержащий кривошипно-шатунную пару,стойку,опору балансира, двуплечий балансир с передним плечом и задним плечом, играющую роль противовеса и выполненную с возможностью изменения длины,определяемой расстоянием от стойки балансира до точки соединения его с шатуном в течение цикла работы механизма, отличающийся тем, что средним шарниром балансир соединен к кривошипно-шатунной паре и посредством дополнительного звена к опоре балансира, а заднее плечо соединено с поводком и образует двухзвенное заднее плечо балансира, причем поводок шарнирно соединен со стойкой.
МПК / Метки
МПК: F16H 21/18, F16H 21/04, F16H 21/14
Метки: станка-качалки, привода, механизм
Код ссылки
<a href="https://kz.patents.su/4-ip23558-mehanizm-privoda-stanka-kachalki.html" rel="bookmark" title="База патентов Казахстана">Механизм привода станка-качалки</a>
Механизм привода станка-качалки
Номер предварительного патента: 15043
Опубликовано: 15.11.2004
Авторы: Журсенбаев Балахазы Ибрайович, Джумагулова Несибели Бердаулетовна, Бекенов Ерулан Турсынович, Кадержанова Заримат Даулетяровна, Уалиев Заир Гахипович, Ибраев Саят Муратулы
МПК: F16H 21/18
Метки: механизм, привода, станка-качалки
Формула / Реферат:
Изобретение относится к нефтегазовому машиностроению, а именно к нефтепромысловым машинам и оборудованию, и может быть использованов наземном механическом приводе штанговыхскважинных насосных установок для добычи нефти.Механизм привода станка-качалки, содержащий кривошипно-шатунную пару, стойку, опорубалансира, двуплечий балансир со средним шарниром, передним плечом и задним плечом, играющимроль противовеса и выполненным с возможностьюизменения...
Механизм привода станка-качалки
Номер предварительного патента: 8845
Опубликовано: 14.04.2000
Автор: Байгунчеков Жумадил Жанабаевич
МПК: F04B 47/02
Метки: привода, механизм, станка-качалки
Формула / Реферат:
Изобретение относится к нефтегазовому машиностроению, а именно к нефтепромысловым машинам и оборудованию и может быть использовано в наземном механическом приводе штанговых скважинных насосных установок (ШСНУ) для добычи нефти.Техническим результатом изобретения является возможность эффективного уравновешивания нагрузки на привод и реализации любого требуемого закона движения точки подвеса колонны штанг без использования тяжелых...
Привод станка-качалки нефти
Номер инновационного патента: 22194
Опубликовано: 15.01.2010
Автор: Куанышев Ганижан
МПК: F16H 21/18
Метки: станка-качалки, привод, нефти
Формула / Реферат:
Изобретение относится к нефтегазовому машиностроению, а именно, к нефтепромыслов машинам и оборудованиям, и может быть использовано в наземном механическом приводе штанговых скважинных насосных установок для добычи нефти. Задача изобретения - повышение надежности за счет улучшения устойчивости и упрощения конструкции. Для этого привод станка-качалки нефти нефти содержит два оппозитно установленных многозвенников, каждый из них состоит из...
Балансир станка-качалки
Номер предварительного патента: 4049
Опубликовано: 16.12.1996
Авторы: Байгунчеков Жумадил Жанабаевич, Ахметов Сайранбек Махсутович, Сериков Нурлан Жанбырбаевич, Даулетова Сауле Каригуловна
МПК: F04B 47/02
Метки: станка-качалки, балансир
Формула / Реферат:
Изобретение относится к машиностроению, в частности, к нефтепромысловым машинам и может быть использовано в наземных приводах глубинно-насосных установок для добычи нефти.Балансир станка-качалки сочленен с шатуном посредством зубчатого колеса, установленного с возможностью движения между подвижной и неподвижной зубчатыми рейками, установленными на балансире. Неподвижная рейка размещена между амортизаторами, установленными также на балансире, и...
Механизм привода режущего аппарата уборочной машины
Номер инновационного патента: 21627
Опубликовано: 15.09.2009
Автор: Адильшеев Ануарбек Суйнбекович
МПК: A01D 34/30
Метки: механизм, привода, режущего, уборочной, аппарата, машины
Формула / Реферат:
Изобретение относится к сельскохозяйствен-ному машиностроению, а именно к механизмам привода режущих аппаратов уборочных машин. Технический результат выражается в устранении вибрации режущего аппарата уравновешиванием сил инерции ножа с силами инерции подвижного пальцевого бруса, движущегося в противоположном направлении движению ножа.Механизм привода режущего аппарата выполнен в виде замкнутого контура и содержит приводной вал 1 с кривошипом 2,...
Предыдущий патент: Вставной струйный насос
Следующий патент: Механизм второго класса с последовательным выстоем рабочего органа
Случайный патент: Установка для нанесения покрытия на металлическое изделие погружением в расплав