Промежуточный привод конвейера
Номер патента: 2089
Опубликовано: 15.06.1995
Авторы: Айтжанов Булат Айдарбекович, Байконуров Карим Омирханович, Ирмухаметов Билял Хакимжанович
Формула / Реферат
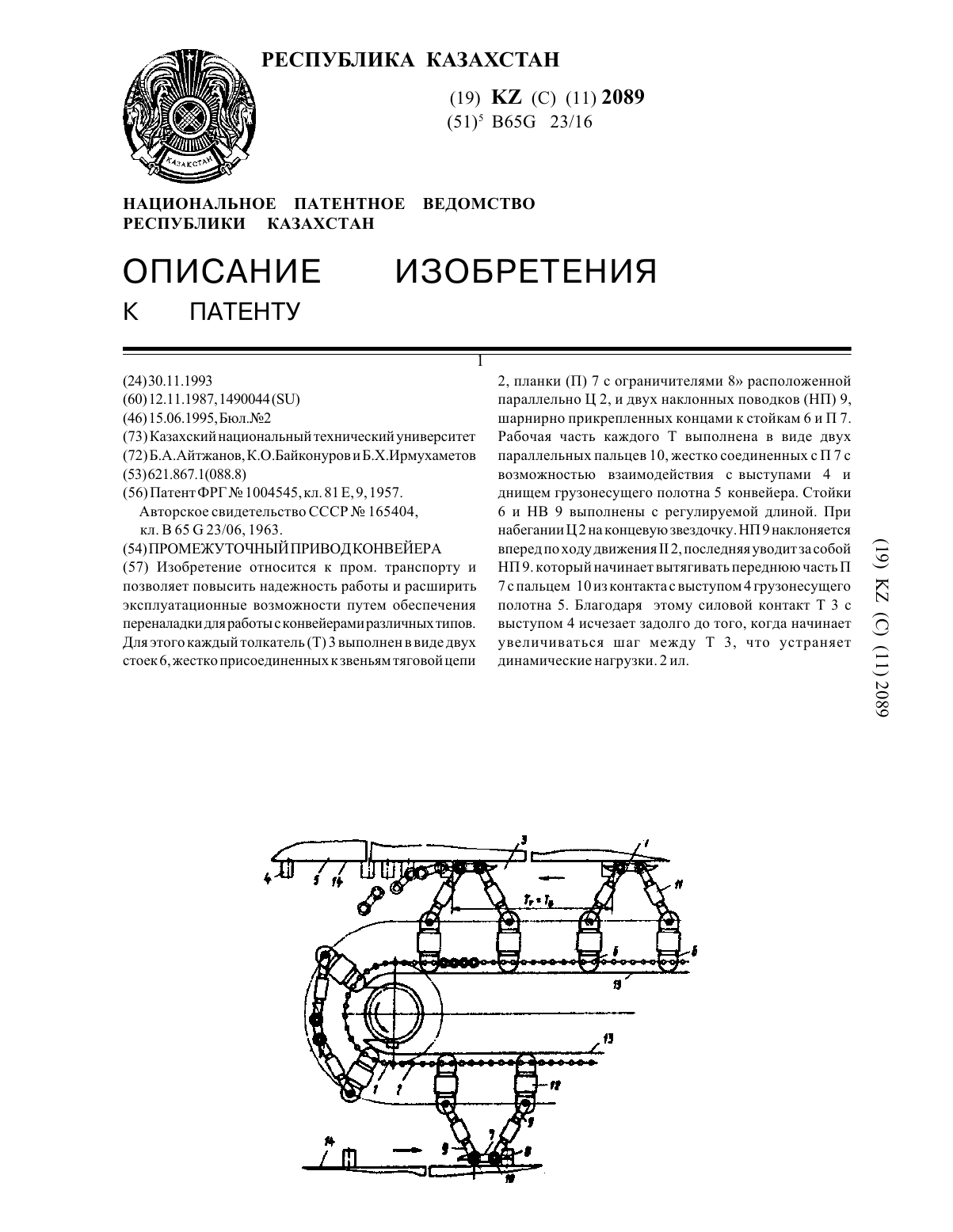
Изобретение относится к пром. транспорту и позволяет повысить надежность работы и расширить эксплуатационные возможности путем обеспечения переналадки для работы с конвейерами различных типов. Для этого каждый толкатель(Т) 3 выполнен в виде двух стоек 6, жестко присоединенных к звеньям тяговой цепи 2, планки (П) 7 с ограничителями 8, расположенной параллельно Ц 2, и двух наклонных поводков (НП) 9, шарнирно прикрепленных концами к стойкам 6 и П 7. Рабочая часть каждого Т выполнена в виде двух параллельных пальцев 10, жестко соединенных с П 7 с возможностью взаимодействия с выступами 4 и днищем грузонесущего полотна 5 конвейера. Стойки 6 и НВ 9 выполнены с регулируемой длиной. При набегании Ц 2 на концевую звездочку. НП 9 наклоняется вперед по ходу движения П 2, последняя уводит за собой НП 9. который начинает вытягивать переднюю часть П 7 с пальцем 10 из контакта с выступом 4 грузонесущего полотна 5. Благодаря этому силовой контакт Т 3 с выступом 4 исчезает задолго до того, когда начинает увеличиваться шаг между Т 3, что устраняет динамические нагрузки.
Текст
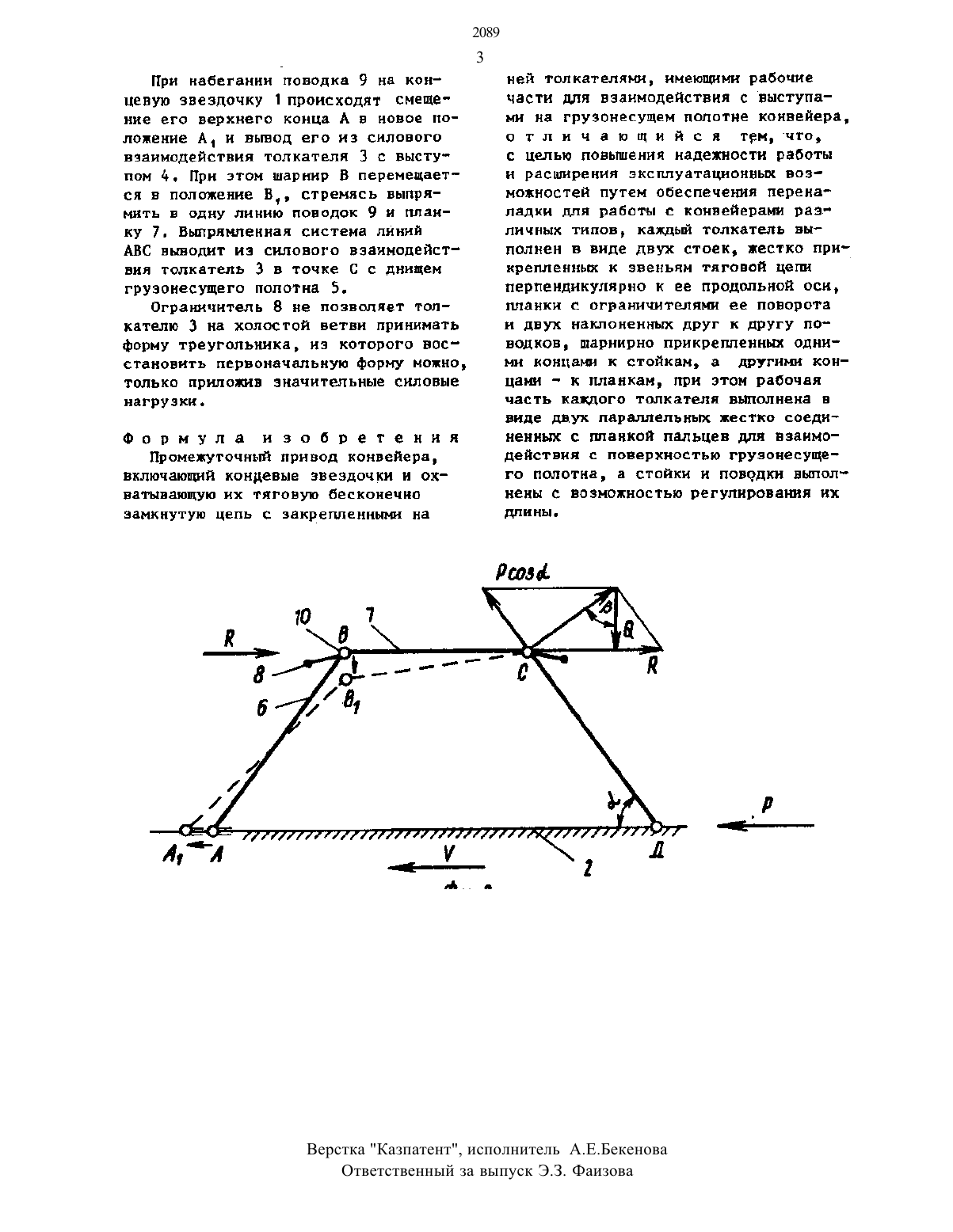
(73) Казахский национальный технический университет(56) Патент ФРГ Мз 1004545, кл. 81 Е, 9, 1957.Авторское свидетельство СССР Мг 165404,кл. В 65 6 23/06,1963.(57) Изобретение относится к пром. транспорту и позволяет повысить надежность работы и расширить эксплуатационные возможности путем обеспечения переналадки для работы с конвейерами различных типов. Для этого каждый толкатель (Т) 3 выполнен в виде двух стоек 6, жестко присоединенных к звеньям тяговой цепи2, планки (П) 7 с ограничителями 8 расположенной параллельно Ц 2, и двух наклонных поводков (НП) 9,шарнирно прикрепленных концами к стойкам 6 и П 7. Рабочая часть каждого Т выполнена в виде двух параллельных пальцев 10, жестко соединенных с П 7 с возможностью взаимодействия с выступами 4 и днищем грузонесущего полотна 5 конвейера. Стойки 6 и НВ 9 выполнены с регулируемой длиной. При набегании Ц 2 на концевую звездочку. НП 9 наклоняется вперед по ходу движения П 2, последняя уводит за собой НП 9. который начинает вытягивать переднюю часть П 7 с пальцем 10 из контакта с выступом 4 грузонесущего полотна 5. Благодаря этому силовой контакт Т 3 с выступом 4 исчезает задолго до того, когда начинает увеличиваться шаг между Т 3, что устраняет динамические нагрузки. 2 ил.Цель изобретения - повышение надежности работы н расширение экспЛУЗТЗЦНОННЫХ ВОЗМОЖНОСТЕЙ ПУТЕМ обеспечения переналадки для работы с конвейерами различных типов.На фиг. 1 схематически изображен привод, общий вид на фиг. 2 топкатель.Промежуточный привод конвейера включает концевые звездочки 1 и охватывающую их тяговую бесконечно замкнутую цепь 2 с шарнирно закрепленными на ней толкателями 3 для взаимодействия с выступами 4 на груэонесущем полотне 5 конвейера.Каждыи толкатель 3 выполнен в вич де двух стоек 6, жестко прикрепленНЬПЕ К ЗВЕНЪНМ ГЯГОВОЙ ЦЕПИ 2 ПЕРПЕН дикулярно к ее продольной осн, план кн 7 с ограничителяи 8 ее поворота, расположенной на прямолинейных участках параллельно тяговой цепи 2, и двух наклоненных друг к другу поводков 9, шарнмрно прикрепленных одними концами к стойкам 6, а друн гимн концами к планкам 7. Рабочая часть каждого толкателя 3 выполнена В ВИДЕ ДВУХ ПЗРЗЛЛЕЛЬННХ ПЭЛЬЦЕБ 10, жестко соединенных с планкой 7. Стойки 6 и поводки 9 выполнены с регулируемой длиной посредством гаек 11 и 12.Жесткостьтолкателя 3 по нижнему основанию обеспечивается натяжением тяговой цепи 2, подпертой опорной поверхностью 13 и фиксацией верхнего основания планки 7 нжней поверхностью 14 наложенного на нее сверху грузонесущего полотна 5. Пока сохраняется параллельность нижнего н верхнего оснований толкателя 3, его жесткость не может быть нарушена боковой нагрузкой от выступа 4 грузонесущего полотна 5.Равенство шагов установки толкателей 3 - Тт и выступов ду- Т д (Ттз Та) позволяет одновременно контактировать нескольким таким сопряженням н передавать соответственно кратНО УВЕЛНЧЕННЫЭ ТЯГОВЫЕ нагрузки ОТ промежуточного привода к грузоиесу щему полотну пластинчатого конвейера.Основное внимание в работе промежуточного привода уделяется безудар ному выведению из силового взаимодействия толкателя 3 с выступом Ь.Промежуточный привод конвейера работает следуюим образом.Тяговая цепь 2 при набегании на концевую звездочку 1 изгибается и наклоняет передний поводок 9 вперед по ходу движения тяговой цепи 2,уводя за собой поводок 9, который начинает вытягивать переднюю часть планки 7 вместе с пальцем 10 из силового контакта с выступом.4 грузопесушего полотна 5. При этом жесткость шарнирной равнобецренной трапеции нарушается н вал 10 толкателя 3 начинает опускаться к тяговой цепи 2,т.е. силовой контакт толкателя 3 с вьштупом 4 грузонесущего полотна 5 исчезает задолго до того, когда начинает увеличиваться лаг Т, между смежньъш толкателями 3 - устраняется основная причина возникновения ударных динамческих нагрузок между толкателем 3 и выступом д груаонесущего полотна 5.Привод чутко реагирует на степень силового взаимодействия сопрягаемы узлов конвейера днища грувонесуще го полотна 5 и верхней поверхности толкатели 3, образуемой верхними(опорными) линиями двух поперечных пальцев 10, увеличивая жесткость шарнирной равнобедреиной трапеци с увеличением веса грузонесущего полотна 5 н транспортируемого груза.На фиг. 2 шарнирная система толкателя находится в рабочем состоянии. при этом на нее воздействуют вертикальная нагрузка О массы самоч го грузонесущего полотна 5 и транспортируемого груза, тяговое усилие Р. а также реактивная нагрузка К сопротивления движению грузонесущего полотна 5. Реэультирующая сумма нагрузок Р и В равнаДля сохранения устойчивости шарнирной системы толкателя промежуточ ного привода достаточно приложения в точке С инимальной нагрузки веса грузонесущего полотнаПри набеганни поводка 9 на концевую звездочку 1 происходят смещение его верхнего конца А в новое положение А, и вывод его на силового взаимодействия толкателя 3 с выстут пом 4. При этом шарнир В перемещается в положение В, стремясь выпрямить в одну линию поводок 9 н планку 7. выпрямленная система линий АБС выводит из силового взаимодействия толкатель 3 в точке С с днищем грузонесущего полотна 5.Ограничитель 8 не позволяет толкателю 3 на холостой ветви принимать форму треугольника, из которого восстановить первоначальную форму можно,только приложив значительные силовыеФ о р н у л а и 3 о О р е т е н и я Промежуточный привод конвейера,включающий концевые звездочки н окватывающую их тяговую бесконечно ЗЗМКНУТУЮ ЦЕПЬ С ЗЕКРВПЛЕННЫЪШ наней толкателями, имеюнмн рабочие части для взаимодействия с выступами на грузонесущем полотне конвейера,о т л и ч а ю Щ и й с я тем, что, с целью повышения надежности работы и расширения эксплуатационным возможностей путем обеспеченя переналадки для работы с конвейерами раз личных типов, каждый толкатель вычполнен в виде двух стоек, жестко прикрепленньш к звеньям тяговой цепи перпендикулярно к ее продольной осн,планки с ограннчителям ее поворота и двух наклоненных дРУг к другу поводков, шарннрно прикреппенны одними концам к стойкам, а другими концами к планкам, при этом рабочая часть каждого толкателя выполнена в виде двух параллельных жестко соединенных с пенкой пальцев для взаимодействия с поверхностью грувонесуще го полотна, а стойки н поводки выпол иены с возможностью регулнрованя ихВерсткаЧа 3 патент,исполнитель /13 Бекенова Ответственный за выпуск Э.З. Фаизова
МПК / Метки
МПК: B65G 23/16
Метки: промежуточный, привод, конвейера
Код ссылки
<a href="https://kz.patents.su/3-2089-promezhutochnyjj-privod-konvejjera.html" rel="bookmark" title="База патентов Казахстана">Промежуточный привод конвейера</a>
Промежуточный привод конвейера.
Номер патента: 1822
Опубликовано: 15.03.1995
Авторы: Джиенкулов Сергазы Ахметович, Тищенко Александр Иванович, Тищенко Евгений Александрович, Кожемяченко Борис Пантелеевич
МПК: B65G 23/18
Метки: промежуточный, конвейера, привод
Формула / Реферат:
Изобретение относится к промышленному транспорту, а именно к промежуточному приводу конвейера. Цель изобретения - повышение надежности работы. Промежуточный привод конвейера включает ведущую и ведомую звездочки, охватывающую их тяговую цепь с тяговыми магнитами и ферромагнитные выступы грузоносителей, размещенные с возможностью взаимодействия с готовыми магнитами. Привод снабжен системой синхронизации и эллипсообразным несущим троллеем с...
Грузонесущее полотно пластинчатого конвейера
Номер патента: 2088
Опубликовано: 15.06.1995
Авторы: Айтжанов Булат Айдарбекович, Байконуров Омирхан Аймагамбетович
МПК: B65G 17/06
Метки: пластинчатого, полотно, грузонесущее, конвейера
Формула / Реферат:
Грузонесущее полотно пластинчатого конвейера, включающее жестко закрепленные на тяговой цепи плоские пластины и установленные с возможностью перемещения пластины с вогнутым днищем, отличающееся тем, что, с целью повышения надежности работы конвейера путем увеличения жесткости несущего полотна, каждая из пластин снабжена бортами, которые у пластин с вогнутым днищем выполнены вогнутыми, и эти пластины установлены на стойках, размещенных в зазорах...
Барабан ленточного конвейера
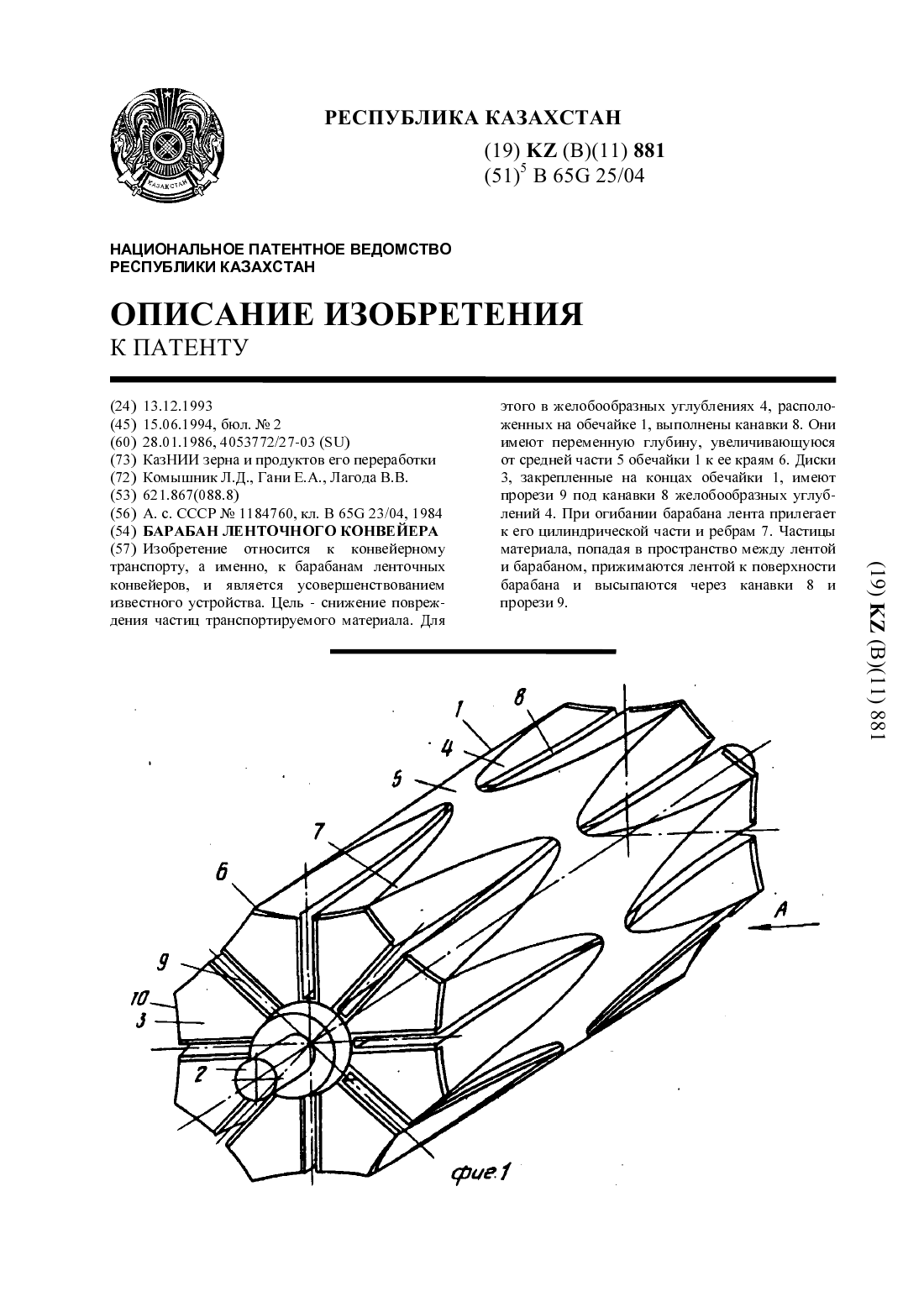
Номер патента: 881
Опубликовано: 15.06.1994
Авторы: Лагода Виталий Владимирович, Ган Евгений Альбертович, Комышник Леонид Дмитриевич
МПК: B65G 23/04
Метки: конвейера, ленточного, барабан
Формула / Реферат:
Изобретение относится к конвейерному транспорту, а именно, к барабанам ленточных конвейеров, и является усовершенствованием известного устройства. Цель - снижение повреждения частиц транспортируемого материала. Для этого в желобообразных углублениях 4, расположенных на обечайке 1, выполнены канавки 8. Они имеют переменную глубину, увеличивающуюся от средней части 5 обечайки 1 к ее краям 6. Диски 3, закрепленные на концах обечайки 1, имеют...
Лента конвейера
Номер патента: 2087
Опубликовано: 15.06.1995
Авторы: Джансугуров Саят Ильясович, Едыгенов Ерик Казтаевич
МПК: B65G 15/42
Формула / Реферат:
Изобретение относится к подъемно транспортному машиностроению и касается конструкции конвейерной ленты, имеющей поперечные перегородки, удерживающие транспортируемый груз. Известна лента конвейера, на грузонесущей поверхности которой на некотором расстоянии одна от другой смонтированы поперечные перегородки, удерживающие материал на ленте и предотвращение его просыпание под действием силы тяжести. Однако данная конструкция ленты имеет...
Ролик ленточного конвейера
Номер предварительного патента: 1383
Опубликовано: 15.12.1994
Авторы: Болысбеков Умурзак, Кравцов Леонид Иванович, Арысов Жеткерген
МПК: B65G 39/00
Метки: конвейера, ролик, ленточного
Формула / Реферат:
Изобретение относится к конвейерному оборудованию, а именно, к роликам ленточных конвейеров. Для снижения металлоемкости и унификации ролика ленточного конвейера, имеющего корпус с установленными в его торцах на полуосях подшипниковые стаканы с подшипниками, каждый подшипниковый стакан установлен на полуоси один конец которой ограничен дном подшипникового стакана.
Предыдущий патент: Грузонесущее полотно пластинчатого конвейера
Следующий патент: Бункер-перегружатель
Случайный патент: Рукавный фильтр