Способ для расширенного, основанного на обмене информацией, управления транспортным средством
Номер инновационного патента: 22457
Опубликовано: 15.04.2010
Авторы: БЕЙКЕР, Джеффри К., ХЕГГЕСТАД, Роберт, Е., ПОЛИВКА, Алан А., ЭГНОТ, Джеймс Р., МАТЕСОН, Уилльям Л.
Формула / Реферат
Предложен способ управления движением множества транспортных средств по направляющему пути, разделенному на множество блоков направляющего пути. Способ использует систему управления, включающую в себя бортовой компьютер (ОВС), расположенный на борту каждого транспортного средства, по меньшей мере, один сервер для связи с ОВС и систему слежения за расположениями транспортных средств. Способ включает шаги, на которых определяют совместный статус блока для всех блоков направляющего пути, передают совместный статус блока к ОВС и управляют движением каждого транспортного средства, основываясь на совместном статусе блока.
Текст
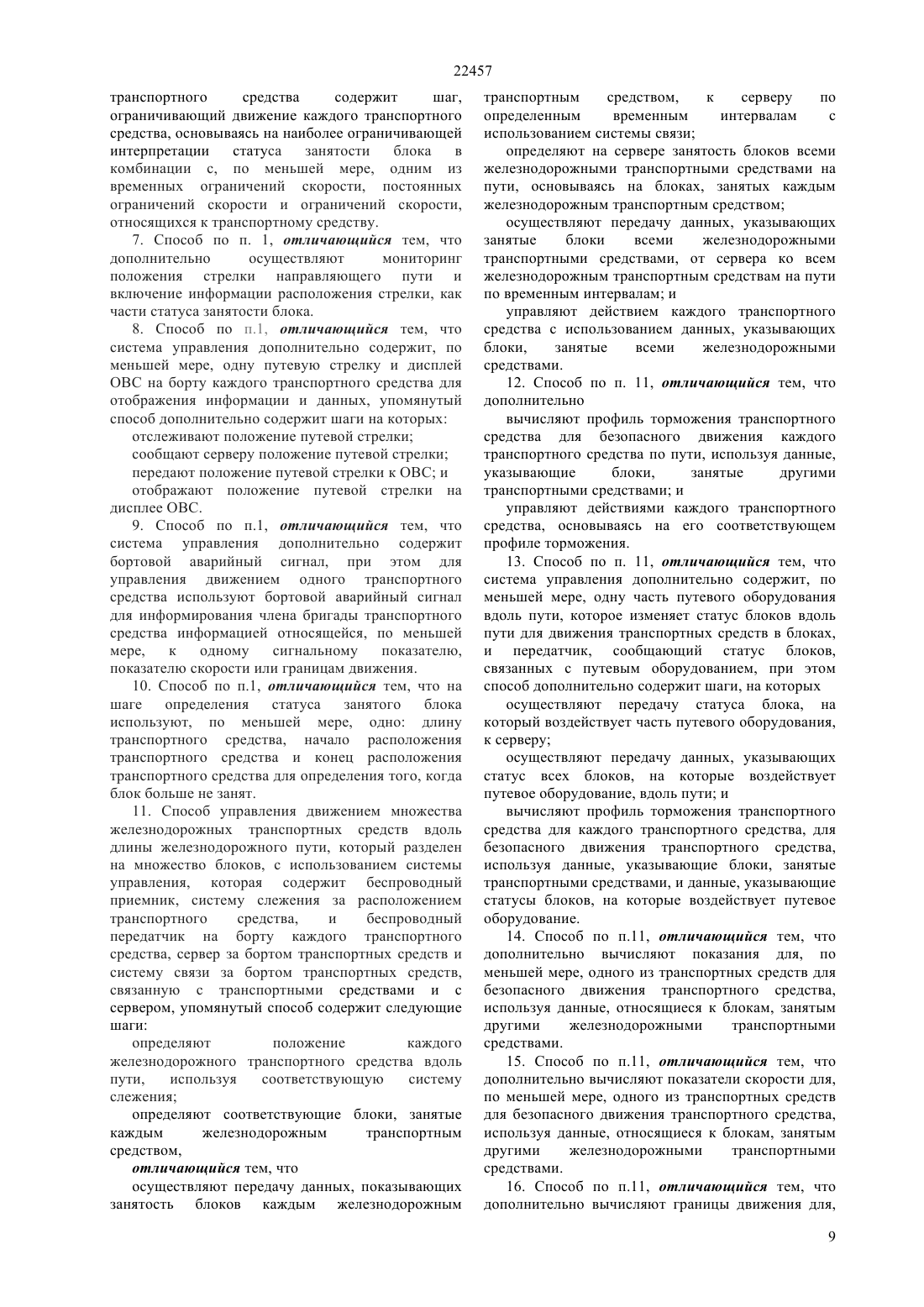
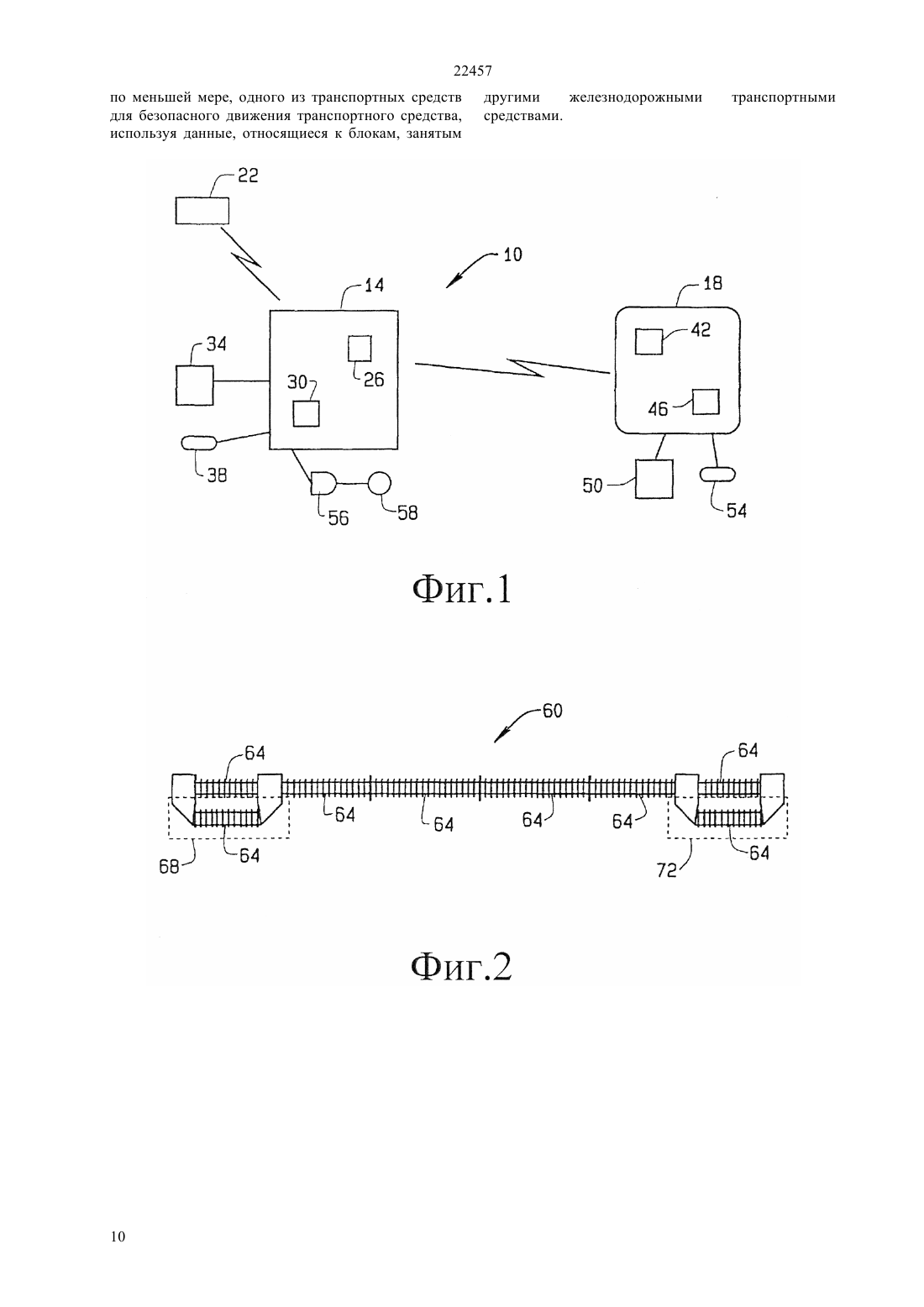
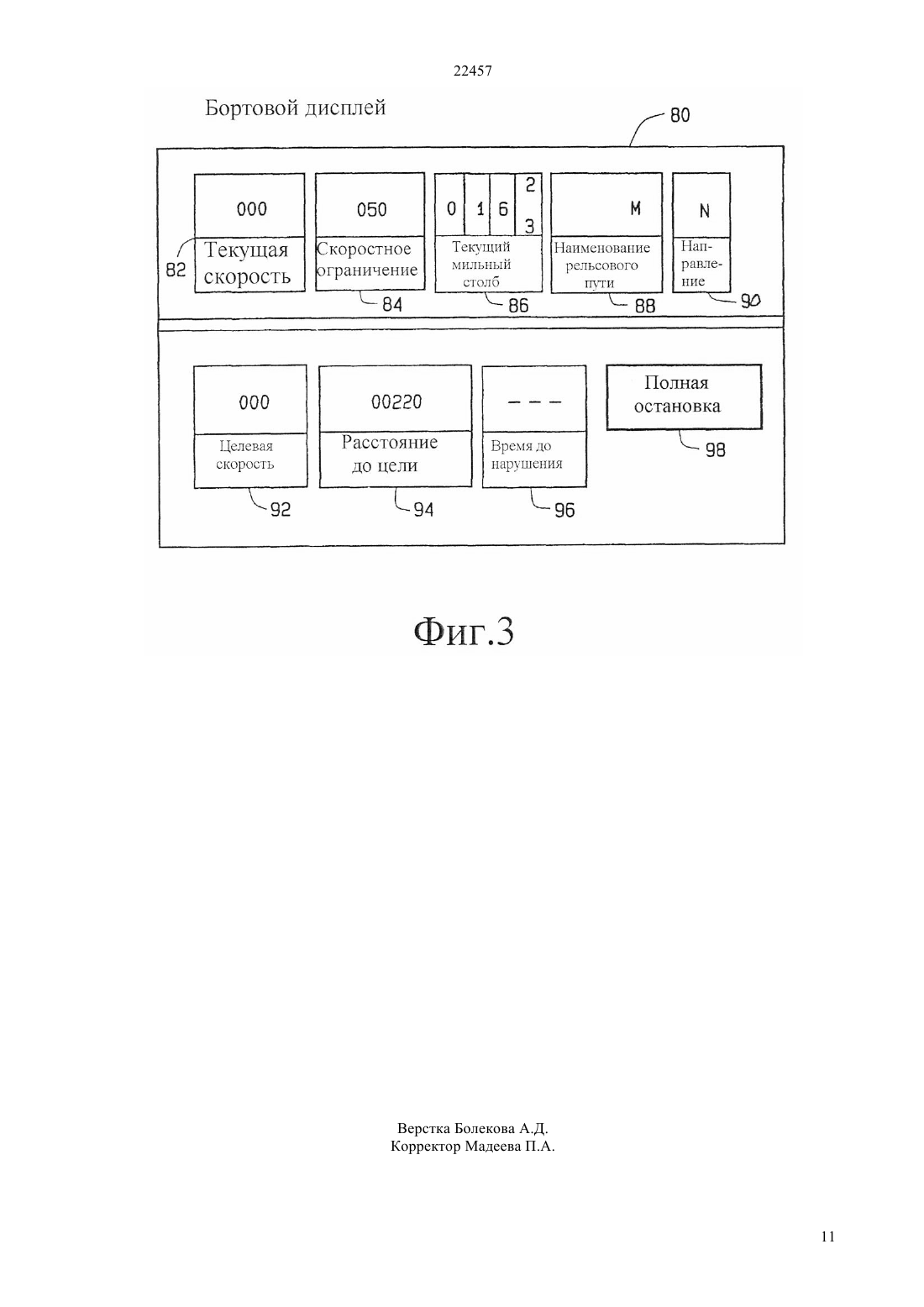
(51) 61 25/04 (2009.01) 61 25/04 (2009.01) КОМИТЕТ ПО ПРАВАМ ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ МИНИСТЕРСТВА ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН(73) ДжиИ ТРАНСПОРТЭЙШН СИСТЕМЗ ГЛОУБАЛ СИГНЭЛИНГ, ЭлЭлСи(57) Предложен способ управления движением множества транспортных средств по направляющему пути, разделенному на множество блоков направляющего пути. Способ использует систему управления, включающую в себя бортовой компьютер (ОВС), расположенный на борту каждого транспортного средства, по меньшей мере,один сервер для связи с ОВС и систему слежения за расположениями транспортных средств. Способ включает шаги, на которых определяют совместный статус блока для всех блоков направляющего пути,передают совместный статус блока к ОВС и управляют движением каждого транспортного средства, основываясь на совместном статусе блока. 22457 Область техники Настоящее изобретение относится в основном к передвижению поездов, а более конкретно, - к управлению движением множества поездов по определенной схеме движения поездов. Предшествующий уровень техники Традиционные сигнальные системы железнодорожных перевозок используют широкий набор путевого оборудования для управления железнодорожными перевозками и обеспечения безопасного разделения поездов. В традиционных системах управление достигается определением присутствия поезда, определением доступного маршрута для каждого поезда, передачей доступного маршрута бригаде поезда и управлением движения поезда в соответствии с доступностью маршрута. Присутствие поезда на железнодорожных путях обычно определяется непосредственно через сенсорное устройство или рельсовую цепь,связанную с определенным звеном (участком) рельсов, указанных далее как блок. Присутствие поезда вызывает короткое замыкание в блоке рельсовой цепи. Таким образом, определяется загруженность каждого блока. Развернута важная логика решений, использующая информацию занятости блока в связке с другой представленной информацией, такой как положения стрелок разъезда для определения возможного доступного маршрута для поездов. Информация доступного маршрута затем передается бригаде поезда посредством физических сигнальных устройств,установленных вдоль пути, благодаря чему бригада поезда получает сигнал и визуально интерпретирует значение отображенного показания сигнала. Альтернативно, информация доступного маршрута передается к поездной бригаде путем передачи информации от путей к поезду по рельсам в виде непрерывного сигнала или через ретрансляторы, как прерывистая локомотивная сигнализация, так что информация показания сигналов может быть непосредственно отображена в кабине локомотива. Затем движение поезда управляется действиями бригады,основываясь на отображенной информации и в случае сбоя в работе бригады по принятию необходимых действий, действует посредством опционального скоростного воздействия. Традиционные железнодорожные системы требуют установки и обслуживания дорогой аппаратуры вдоль пути для сообщения доступности маршрута для приближающихся поездов. Путевое оборудование физически отображает сигналы или показания сигналов, которые интерпретируются бригадой на борту поезда, приближающегося к сигнальному устройству. Таким образом,интерпретация сигнальных показаний может быть предметом ошибки человеческого фактора из-за замешательства, невнимательности, или ненастной погоды. Альтернативой к традиционным путевым,основанным на электрических цепях, сигнальным системам, являются системы, (СВТС) управления 2 поездом, основанные на обмене информацией. Эти системы управления в основном включают в себя компьютер в одном или более фиксированном местоположении,определяющий управление движением и/или ограничения, применимые к каждому определенному поезду. Затем компьютер передает эту определенную для поезда информацию в уникальное сообщение, адресованное или направленное к каждому индивидуальному поезду. Краткое описание существа изобретения В одном варианте осуществления изобретения заявлен способ управления движением множества транспортных средств по направляющему пути,разделенному на множество блоков направляющего пути. Способ использует систему управления,включающую в себя бортовой компьютер (ОВС),расположенный на борту каждого транспортного средства, по меньшей мере, один сервер для связи с ОВС и систему слежения за расположениями транспортных средств. Способ содержит шаги определения совместного статуса блока для всех блоков направляющего пути,передающий совместный статус блока к ОВС и управляющий движением каждого транспортного средства,основываясь на совместном статусе блока. В другом варианте осуществления предложен способ управления движением множества транспортных средств по направляющему пути,разделенному на множество блоков направляющего пути. Способ использует систему управления,включающую в себя бортовой компьютер (ОВС),расположенный на борту каждого транспортного средства, по меньшей мере, один сервер для обмена информацией с ОВС и систему слежения за расположением транспортных средств. Способ содержит шаги, на которых предоставляют определенный набор данных отображения каждому ОВС, который отображает схему направляющего пути, эквивалентные ограничители блоков и связанные характеристики направляющего пути. Способ также содержит использование конкретного ОВС для определения на борту занятости блока для транспортного средства, включающего в себя конкретный ОВС, с этим конкретным ОВС,использующим набор данных отображения. В еще одном варианте осуществления предложена система управления движением множества транспортных средств по направляющему пути, разделенному на множество блоков направляющего пути. Система включает бортовой компьютер (ОВС), расположенный на борту каждого транспортного средства, по меньшей мере, один сервер, сконфигурированный для обмена информацией с ОВС, и систему слежения за расположением транспортных средств. Система сконфигурирована использовать каждый ОВС транспортного средства для определения занятости блока для соответствующего транспортного средства, определяет совместный статус блока,основываясь на занятости блока каждым транспортным средством, передает совместный статус блока каждому ОВС и управляет движением транспортного средства, включающего в себя 22457 соответствующий ОВС, основываясь на совместном статусе блока. Другой вариант осуществления относится к способу управления движением множества транспортных средств,движущихся по направляющему пути. Направляющий путь разбит на множество блоков направляющего пути расположенных на расстоянии друг от друга вдоль направляющего пути. Способ выполняется в контексте системы управления, включающей в себя бортовой компьютер (ОВС), расположенный на борту каждого транспортного средства, по меньшей мере, один сервер для связи с каждым ОВС и систему слежения за расположениями транспортных средств. Статус занятости блока определяется для блоков направляющего пути перед направлением движения, по меньшей мере, одного из транспортных средств. Статус занятости блока передается на транспортное средство к ОВС. Движением транспортного средства управляют,основываясь на статусе занятости блока, по меньшей мере, когда текущее расстояние остановки транспортного средства не зависит от номера блоков, входящих в это расстояние. Краткое описание чертежей В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопровождающие чертежи, на которых Фиг. 1 - изображает схему системы управления движением множества транспортных средств по направляющему пути, согласно одному варианту осуществления изобретения Фиг. 2 - диаграмму части направляющего пути для системы на фиг. 1, разделенной на эквивалентные блоки, согласно изобретению Фиг. 3 - примерный вариант осуществления бортового дисплея информации для бригады транспортного средства, согласно изобретению. Подробное описание предпочтительных вариантов воплощения изобретения Фиг. 1 изображает схему системы 10 управления движением множества транспортных средств по направляющему пути (не показан) в соответствии с одним вариантом осуществления настоящего изобретения. Каждое транспортное средство включает в себя один или более модулей транспортного средства, соединенных вместе для образования одного транспортного средства. Система 10 включает в себя бортовой компьютер 14(ОВС) для каждого транспортного средства, сервер 18, расположенный на постоянном удаленном узле,и бортовую систему 22 слежения, для отслеживания положения каждого транспортного средства. ОВС 14 содержит процессор 26, который осуществляет крайне необходимые и простые операции, а также необходимое кодирование и декодирование информации, и запоминающее устройство 30, такое как база данных. ОВС 14 соединен с дисплеем 34 для просмотра информации, данных и возможных графических изображений, и интерфейсом 38 пользователя ОВС,который позволяет пользователю вводить информацию, данные и/или запросы к ОВС 14, например, клавиатуру или мышь. ОВС 18 содержит процессор 42, который осуществляет важные и простые операции, а также необходимое кодирование и декодирование информации, и запоминающее устройство 46,которое, в одном варианте осуществления, содержит базу данных. Более того, сервер 18 соединен с дисплеем 50 сервера для просмотра информации,данных, и, в одном варианте осуществления,графических представлений. Сервер 18 также соединен с пользовательским интерфейсом 54 сервера, который позволяет пользователю вводить информацию, данные, и/или запросы к серверу 18,например, клавиатуру или мышь. И ОВС 14 и сервер 18 взаимодействуют с различными элементами управления (не показаны),такими как датчики, приводы, сигнализаторы и с путевыми устройствами, такими как переключатели направляющей, т.е. стрелочными переводами, для выбора среди двух или более маршрутов по отклоненным стрелкам, сигнальными устройствами и цепями определения занятости, например,рельсовыми цепями. ОВС 14 обменивается информацией с сервером 18 посредством системы связи, такой как сеть мобильной радиосвязи. Система 22 слежения включает в себя датчики положений (не показаны) и устройства (не показаны), такие как приемник системыглобального позиционирования, тахометр, гироскоп,одометр, метки расположений на направляющем пути и бортовой считыватель меток. В одном варианте осуществления, система 22 слежения отделена от ОВС 14 и получает входные сигналы, по меньшей мере, от одного спутника (не показан). Бортовая система может, в некоторых случаях,получать и использовать различную корректирующую информацию для улучшения определения погрешности расположения и/или для целостности. На фиг. 1 показана бортовая система 22 слежения, отдельная от ОВС 14, однако, в другом варианте осуществления ОВС 14 включает в себя систему 22 слежения. В еще одном варианте осуществления, система 22 слежения имеет компоненты, отдельные от ОВС 14, и компоненты,которые включены в ОВС 14. Например,компоненты системы 22 слежения, такие как приемник системы глобального позиционирования и алгоритмы программного обеспечения включены в ОВС 14, хотя другие компоненты системы 22 слежения, такие как, тахометр, гироскоп, одометр и считыватель меток направляющего пути расположены отдельно от ОВС 14. В еще одном варианте осуществления система 22 слежения получает информацию о конце транспортного средства и начале транспортного средства, и ввод данных от оператора, например, машиниста транспортного средства, содержащую информацию и данные, относящиеся к положению транспортного средства для определения расположения, по меньшей мере, одного начала или конца транспортного средства. В альтернативном варианте осуществления сервер 18 расположен в мобильном 3 22457 местоположении, например, в здании мобильного офиса или поезде. В дополнительном варианте осуществления запоминающее устройство 30 не включено в ОВС 14. Вместо этого, запоминающее устройство 30 соединено с ОВС 14. Кроме этого,запоминающее устройство 46 не включено в сервер 18, а соединено с сервером 18. В одном варианте осуществления ОВС 14 взаимодействует с головным вагоном транспортного средства 56, которое обменивается информацией с хвостовым устройством 58 транспортного средства,расположенным в конце транспортного средства. Устройства 56 и 58 предоставляют транспортному средству полную информацию,определяя возможные расцепления транспортного средства. В дополнительном варианте осуществления устройства 56 и 58 предоставляют информацию,относящуюся к длине транспортного средства и расположению хвоста транспортного средства. Альтернативные потенциальные источники данных длины транспортного средства являются внешними системами (не показаны), такими как распознавание автоматического оборудования , определители теплых модулей, счетчики осей, рельсовые цепи,ручной ввод и/или информационные системы. На фиг. 2 показана схема направляющего пути 60, разбитого на эквивалентные блоки 64. Направляющий путь 60 включает в себя наземнооснованную сеть (не показана) направляющих путей, которую используют транспортные средства для движения по наземным территориям различного размера. Сервер 18 (показан на фиг. 1) содержит данные направляющего пути,такие как ограничители эквивалентных блоков и сигнальную логику, которая относится к части или ко всему направляющему пути 60. В альтернативном варианте осуществления сервер 18 содержит территориальные данные,относящиеся к направляющему пути 60. В дополнительном варианте осуществления, традиционный алгоритм сигнальной конструкции используется для разделения направляющего пути 60 на эквивалентные блоки 64, которые представляют соседние части направляющего пути 60. Алгоритм использует информацию,например,данные направляющего пути, вес транспортного средства,скорость транспортного средства,длину транспортного средства и желаемую пропускную способность для определения эквивалентных блоков 64. Алгоритм определяет число и длину эквивалентных блоков 64, из условия, что эквивалентных блоков 64 может быть любое число,а длина эквивалентных блоков 64 может меняться. В альтернативном варианте осуществления длина блоков меняется динамически, как меняются характеристики транспортных средств на конкретной части направляющего пути. В одном варианте осуществления, блоки направляющего пути определенны маленькими. Маленькие блоки в сочетании с использованием вычисления тормозного/остановочного пути, основанного на характеристиках фактического транспортного средства и направляющего пути, позволяют 4 безопасно управлять транспортным средством с интервалами, приближающимися к теоретическому минимуму. Дополнительный вариант осуществления позволяет делить существующие традиционные физические сигнализирующие блоки на более мелкие, которые обрабатываются как эквивалентные блоки. Такое деление позволяет обеспечить безопасное снижение интервальной дистанции транспортных средств в тех случаях, где существуют и продолжают действовать традиционные сигнальные устройства, которые управляются цепями направляющего пути,например, рельсовыми цепями. Кроме этого, на фиг. 2 показан направляющий путь 60, включающий в себя обгонные пути 68 и 72, которые разделены на эквивалентные блоки 64. В одном варианте осуществления сервер 18 передает к каждому ОВС 14 важный кодифицированный набор данных отображения,содержащий данные,относящиеся к характеристикам направляющего пути. В альтернативном варианте осуществления источник,находящийся вне транспортного средства, отличный от сервера 18, осуществляет радиопередачу кодированного набора данных отображения к подходящему ОВС 14. Набор данных отображения хранится в базе данных 30 и содержит информацию и данные, такие как ограничители эквивалентных блоков. В альтернативном варианте осуществления набор данных отображения содержит связанную информацию, такую как постоянные ограничения скорости, временные ограничения скорости, уклоны и информацию для интерпретации показаний. В альтернативном варианте осуществления сервер 18 передает подмножество набора данных отображения, который специфичен к конкретной части направляющего пути или конкретной географической области. В альтернативном варианте осуществления набор данных отображения определен и предварительно загружен в базу 30 данных. В дополнительном альтернативном варианте осуществления, локально значимые данные отображения передаются поэтапно, как требуется, от устройств в или около направляющего пути, например, меток или распределенных серверов, так что не требуются длительное хранение и большие перегрузки данных отображения. По движению транспортного средства вдоль маршрута ОВС 14 определяет положение транспортного средства, основываясь на данных,полученных от системы 22 слежения. Используя информацию, полученную от системы 22 слежения,например, длину транспортного средства и целостность информации, а также набор данных отображения, ОВС 14 определяет, какой из эквивалентных блоков 64 (показанных на фиг. 2) занят транспортным средством в настоящее время. Каждый раз, когда транспортное средство входит в новый эквивалентный блок 64, ОВС 14 передает сообщение на сервер 18, идентифицируя, в какой эквивалентный блок 64 только что вошло транспортное средство, и каждый раз, когда транспортное средство покидает эквивалентный 22457 блок 64, ОВС 14 передает сообщение к серверу 18,идентифицируя, какой эквивалентный блок 64 только что покинул транспортное средство. Затем сообщение сохраняется в базе 46 данных. В другом варианте осуществления ОВС 14 прогнозирует и сообщает любому эквивалентному блоку 64, что транспортное средство вероятно займет блок, перед тем как остановится, например,те эквивалентные блоки 64, которые находятся на тормозном пути транспортного средства. В определении прогноза эквивалентных блоков,которые будут заняты, ОВС 14 также применяет интервальные запасы,увеличивая спрогнозированный диапазон занятых блоков на число по факторам, таким как системные задержки,получающиеся в период ожидания перед применением тормоза. Спрогнозированные занятия эквивалентных блоков передаются к серверу 18 и хранятся в базе 46 данных. Сервер 18 получает информацию о занятости и свободности от ОВС 14, находящихся на борту всех транспортных средств, использующих специфичную зону направляющего пути 60 (показан на фиг. 2),контролируемого сервером 18. Кроме этого, сервер 18 получает информацию, сообщенную от путевых устройств, таких как стрелка или человеческий(ручной) ввод на борту. Сервер 18 использует сообщение о занятости и другую информацию для получения статуса эквивалентного блока для каждого эквивалентного блока 64 способом,аналогичным тому, как логика, использованная в традиционных элементах путевой сигнализации для определения показаний от соединений с цепями направляющего пути и путевых устройств, таких как стрелки. Статус для каждого эквивалентного блока 64 является динамическим. Статус эквивалентного блока для каждого эквивалентного блока 64 либо ограничен к одному из только двух возможных, соответственно, блок занят или блок свободен, или выбору из множества возможных(указанных со ссылкой вместе как статус занятости блока). Разнообразные условия предписывают различные скоростные ограничения внутри эквивалентного блока 64. В простейшем случае,если используется только два возможных статуса блоков, ограничение нулевой или низкой скорости применяется в блоке, который занят, поскольку максимальное увеличение скорости к точке тормозного пути от следующего вхождения в занятый блок разрешено в блоке, который еще не занят. В альтернативных вариантах осуществления,кроме дополнительных уровней ограничения скорости, дополнительная информация передается индикаторами статуса блока, например, больше чем одно транспортное средство в блоке, маршрут ответвления, где транспортное средство должно свернуть с магистрали в стрелочном переводе. Сервер 18 компилирует и хранит все статусы эквивалентных блоков в базе 46 данных, затем получает совместный статус эквивалентного блока,содержащий информацию статуса эквивалентного блока для всех эквивалентных блоков 64 отслеживаемых сервером 18. Аналогично сервер 18 осуществляет радиопередачу сообщений совместных статусов эквивалентных блоков всем транспортным средствам в зоне сервера 18 из условия, что каждый бортовой ОВС 14 каждого транспортного средства в зоне сервера 18 получает туже самую информацию. (В широком смысле,сервер 18 передает сообщение статуса блока, т.е. статус занятости блока к ОВС на борту транспортного средства.) В одном варианте осуществления сервер 18 осуществляет радиопередачу обновления сложного статуса эквивалентного блока периодически с определенной интенсивностью. В дополнительном варианте осуществления сервер 18 осуществляет радиопередачу обновления сложного статуса эквивалентного блока асинхронно и всякий раз,когда изменяется статус эквивалентного блока. В одном варианте осуществления сообщение между сервером 18 и ОВС 14 осуществляется через наземную радиосеть. Каждый ОВС 14 на всех транспортных средствах получает радиопередачу информации по направляющему пути управления совместного статуса эквивалентного блока из сервера 18. В альтернативных вариантах осуществления обмен информацией между сервером 18 и ОВС 14 осуществляется, по меньшей мере, по одной из сотовой или спутниковой связи. На фиг. 3 показан примерный вариант осуществления графического представления 80, использующегося для отображения информации, относящейся к управлению или ограничению движения транспортного средства. Графическое представление 80 включает в себя индикатор 82 текущей скорости, индикатор 84 ограничения скорости, индикатор 86 текущего мильного столба,индикатор 88 имени рельсового пути, индикатор 90 направления, индикатор 92 целевой скорости,индикатор 94 расстояния до цели, индикатор 96 времени до нарушения и индикатор 98 абсолютной остановки, которые используются для передачи элементов управления или ограничений для транспортного средства. Основываясь на сообщениях совместного статуса эквивалентного блока, полученных ОВС 14 (фиг. 1), бортовое оборудование каждого транспортного средства,такое как дисплей 34, отображает информацию или ограничения необходимые для безопасного управления транспортным средством. Как показано на фиг.3, информация, необходимая для безопасного управления транспортным средством, включает в себя информацию,относящуюся к этому транспортному средству,описание цели,ограничения на диапазоне движения, разрешенного для транспортного средства, и скоростные ограничения, которые могут храниться на борту. В другом варианте осуществления,дисплеи показывает сигнальные показания, такие как красный, желтый и зеленые огни вместо целевых ограничений движения. Кроме этого, система 10(фиг. 1) включает в себя узел звукового аварийного сигнала (не показан), на борту транспортного средства, который обеспечивает предупреждения приближающихся объектов, ограничения или 5 22457 изменения показаний к более ограничивающему состоянию или когда было осуществлено торможение. Для безопасного реагирования на потери связи между ОВС 14 и сервером 18,если последовательные обновления совместного статуса блока больше чем враз, например, 2, не получены в ОВС 14, ОВС 14 заранее устанавливает по умолчанию наиболее ограничивающие статусы для блоков. Примерные ограничивающие статусы для блока включают в себя остановку транспортного средства, уменьшение скорости до меньшей скорости, например, около 20 миль в часв блоке, остановку транспортного средства на входе в блок и затем прохождение на маленькой скорости,такой как 20 или меньше. ОВС 14 просматривает базу 30 данных (фиг. 1) и получает статическую информацию, относящуюся к цели заранее, например, ограничения скорости и динамические данные,например,занятые эквивалентные блоки. Статическая информация обозначает,является ли целевой объект постоянным, временным или зависимым от сигнальных показаний. Используя динамическую информацию в сочетании со статической информацией, ОВС 14 определяет, достигается ли ограничение малой скорости или любой другой цели. Затем ОВС 14 вычисляет тормозной путь,основываясь на текущей скорости, целевом расположении и целевой скорости, которая может быть нулевой, приравненной к остановке. Кроме этого, ОВС 14 считает градиент направляющего пути и возможность торможения транспортного средства, для уточнения расчетов тормозного пути. ОВС 14 определяет, какой объект первым будет требовать от транспортного средства уменьшить скорость или остановиться. В дополнительном варианте осуществления,основываясь на инфраструктуре передачи данных и данных,предоставляемых к ОВС 14,дополнительная информация, такая как, градиент направляющего пути, расположения элементов направляющего пути, например, перекрестков,дефектоскопов и блоков, занятых другими транспортными средствами, отображается на графическом представлении 80 либо в графическом,либо в текстовом формате. Дополнительная информация хранится в базе 30 данных и используется в сочетании с заблаговременно описанными данными для определения изменений в движении транспортного средства и предоставления информации бригаде. Инфраструктура также поддерживает передачу и отображение других типов сообщений,например,информационных сообщений, рабочих заданий и электронной почты. В одном варианте осуществления, интерфейс пользователя ОВС позволяет бригаде вводить информацию или запрос информации, которая используется на борту. В альтернативном варианте осуществления, интерфейс пользователя ОВС позволяет бригаде вводить информацию или запросы информации для передачи за борт. 6 Когда используется принудительное торможение, ОВС 14 вычисляет расстояние и время,где торможение должно начаться, чтобы выполнить ограничения, связанные с каждым объектом. Если остающееся время для любого данного объекта меньше, например, чем 60 секунд, индикатор 96 времени до нарушения будет отображать цифрами оставшееся время. Если оставшееся время меньше чем, например, одна секунда, и бригада не предприняла подходящего действия для управления транспортным средством,будет применено штрафное торможение. В другом варианте осуществления сервер 18 взаимодействует с офисным компьютером (не показан), например, диспетчерской системой для получения информации, такой как запросы магистралей, которые должны быть освобождены или положения стрелок, которые должны быть изменены. Кроме этого, сервер 18 предоставляет информацию,такую как расположение транспортных средств в форме занятости эквивалентных блоков, офисным компьютерам. Сервер 18 получает информацию, использованную для воздействия на движение транспортного средства, например, временные приказания о снижении скорости, данные направляющего пути,такие как градиент, постоянные ограничения скорости и эквивалентные сигнальные расположения и данные транспортного средства,такие как длина транспортного средства и вес. В еще одном варианте осуществления система 10 включает в себя множество серверов 18,расположенных в одном или более местах, таких как различные офисы или различные путевые расположения. Таким образом, каждый сервер 18 связан со специфичными эквивалентными блоками и получает информацию занятости эквивалентных блоков только от транспортных средств,занимающих зону эквивалентных блоков, связанных с определенным сервером 18. Поэтому, каждый сервер 18 определяет сложный статус эквивалентного блока, уникальный к эквивалентным блокам, связанным с его зоной. В дополнительном варианте осуществления ОВС 14 использует традиционный бортовой локомотивный процессор сигналов (не показан) и интерфейс оператора, такой как интерфейс 38. ОВС определяет и сообщает о занятости эквивалентных блоков и получает информацию совместного статуса эквивалентного блока для каждого эквивалентного блока 64 (фиг. 2). Однако ОВС 14 синхронизирует коды традиционных локомотивных сигналов, которые структурированы, как коды от направляющего пути и путевых устройств, но фактически поставляются к ОВС 14 от сервера 18. Синхронизированные сигнальные коды затем используются для управления традиционным локомотивным сигнальным процессором, взамен кодовых сигналов, определяемых традиционными локомотивными сигнальными датчиками,смонтированными на транспортном средстве около направляющего пути. 22457 В еще одном варианте осуществления,традиционные блоки направляющих путей, в отличие от эквивалентных блоков, используются для определения занятости блока, блока статуса и содержат статус блока. Размеры традиционного блока направляющего пути определены физическими делениями в направляющем пути,созданными традиционным оборудованием цепей определения занятости. В еще одном дополнительном варианте осуществления, реализована пошаговая функция для дополнительного улучшения железнодорожной оперативной эффективности. Функциональность планирования движения встроена, или соединена с диспетчерской системой(не показана). Планировщик движения создает план движения для всех транспортных средств в его области управления для достижения оптимальной эффективности. План движения согласовывается с законами физики, а также с ограничениями безопасности,которые наложены статусами эквивалентных блоков. Планировщик движения передает соответствующую часть плана движения,употребленную ссылкой, как рейсовый план, к каждому ОВС 14. Рейсовый план включает в себя ожидаемое время прибытия (ЕТА) и ожидаемое время отправлениядля критических путевых точек по пути. Сообщения рейсового пути посылаются в дополнение, вместо сообщений сложных статусов эквивалентных блоков. Функциональность добавляется к ОВС 14 для создания сигналов,например,скоростных инструкций для машиниста транспортного средства,который, если необходимо, управляет скоростью транспортного средства согласно плану. Сообщение передается от каждого ОВС 14 в форме отчетов занятости эквивалентных блоков или отчетов точных расположений,использованных планировщиком движения, для определения следует ли каждое транспортное средство расписанию. Если транспортное средство выбивается из расписания на диапазон столкновения с другими транспортными средствами, планировщик движения обновляет план движения и передает исправленный план рейса к задействованным транспортным средствам. В другом варианте осуществления детектор разбитого рельсового пути монтируется на борт каждого транспортного средства для отображения целостности направляющего рельсового пути. При определении разбитого направляющего пути,детектор направляющего пути передает сообщение к серверу 18 и оповещает команду, которая изменяет движение транспортного средства,основываясь на наибольшем ограничивающем показании для эквивалентного блока, где случилось торможение. В альтернативном варианте осуществления, детектор направляющего пути передает сообщение серверу 18 и сервер 18 оповещает бригаду. Кроме этого, оповещение определения сломанного рельса передается к ОВС 14 близлежащих транспортных средств, чтобы информировать бригады каждого транспортного средства, так что они могли предпринять необходимые действия. В еще одном варианте осуществления система 10 обеспечивает автоматическую или самоходную эксплуатацию транспортного средства. ОВС 14 взаимодействует с дроссельной заслонкой (не показана) транспортного средства, бортовыми датчиками (не показаны) и тормозной системой (не показана) для автоматического управления движением транспортного средства в соответствии с руководствами и ограничениями, определенными ОВС 14. Функция планера движения и функция пошагового перемещения используются для управления движением транспортного средства. Самоходная система управляет дроссельной заслонкой и тормозом для согласования с рейсовым планом, но не будет превышать ограничения безопасности, указанные сообщениями совместного статуса эквивалентных блоков и другие ограничения. Альтернативно,планировщик движения и функции пошагового движения не используются для непосредственного управления дроссельной заслонкой и тормозом. В этом случае ОВС управляет движением транспортного средства,основываясь на информации скорости в согласовании со статусом блока, полученным от сервера 18. Другой вариант осуществления изобретения относится к способу управления движением множества железнодорожных транспортных средств по длине железнодорожного пути (которое разделено на множество блоков) посредством использования системы управления, которая включает в себя запоминающее устройство,расположенное на борту каждого транспортного средства,бортовой компьютер(ОВС),расположенный на борту каждого транспортного средства, по меньшей мере, один сервер для обмена информацией с ОВС и систему отслеживания расположения транспортного средства. Для осуществления способа,заданные данные отображения маршрута, по меньшей мере, одного железнодорожного транспортного средства хранятся в запоминающем устройстве. Данные показывают схему расположения путей и расположения ограничителей каждого блока вдоль маршрута. Положение,по меньшей мере,одного железнодорожного транспортного средства вдоль маршрута определяется его соответствующей бортовой системой слежения. Соответствующий блок, занятый, по меньшей мере, одним железнодорожным транспортным средством,определяется соответствующими данными отображения. Другой вариант осуществления относится к способу управления движением множества железнодорожных транспортных средств по длине железнодорожного пути (который разбит на множество блоков) посредством использования системы управления, которая включает компьютер,систему слежения и беспроводной передатчик на борту каждого транспортного средства. При осуществлении способа положение каждого 7 22457 железнодорожного транспортного средства вдоль маршрута определяется использованием его соответствующей бортовой системы слежения. Соответствующий блок,занятый каждым железнодорожным транспортным средством,определяется соответствующим бортовым компьютером. На каждом железнодорожном транспортном средстве получают данные относительно блоков, занятых всеми из остальных железнодорожных транспортных средств по пути,использованием беспроводного приемника на соответствующем транспортном средстве. Действия каждого транспортного средства управляются бортовым компьютером с использованием данных,относящихся к блокам,занятым другими железнодорожными транспортными средствами. Система, описанная выше, обеспечивает способ повышения интенсивности движения или уровня пропускной способности по сравнению с или лучшие чем те,которые достигаются традиционными путевыми сигнальными системами без использования рельсовых цепей или путевых сигналов. Кроме этого, уменьшается стоимость развертывания,поддержки и модификации сигнального оборудования или эквивалентного оборудования. Любой из вышеупомянутых способов вариантов осуществления может быть реализован как продукт компьютерной программы,содержащий запоминающую среду, читаемую схемой обработки,и сохраненными инструкциями, для выполнения процессором для осуществления способа, о котором идет речь. Подходящая запоминающая среда включает в себя, но не ограничена, жесткие диски,гибкие диски, оптические диски и другие оптические запоминающие устройства, и носитель интегральной схемы, включающий в себя флэшпамять, / и . Несмотря на то, что изобретение было описано для различных отдельных вариантов осуществления,специалистам в данной области техники ясно, что изобретение может быть осуществлено на практике с изменениями в пределах сущности и объема формулы изобретения. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ управления движением множества транспортных средств,движущихся по направляющему пути, который разбит на множество блоков направляющего пути, распложенных на расстоянии друг от друга вдоль направляющего пути, используя систему управления, включающую в себя бортовой компьютер (ОВС), расположенный на борту каждого транспортного средства, по меньшей мере, один сервер для обмена информацией с каждым ОВС и систему слежения за расположением транспортного средства,упомянутый способ, содержит шаги, на которых определяют статус занятости блока для блоков направляющего пути перед направлением движения,по меньшей мере, одного из транспортных средств,отличающийся тем, что 8 передают статус занятости блока к ОВС на одном транспортном средстве и управляют движением указанного одного транспортного средства, основываясь на статусе занятости блока, для по меньшей мере, одного текущего расстояния для остановки упомянутого одного транспортного средства, независимо от количества блоков, включенных в расстояние для остановки. 2. Способ по п.1, отличающийся тем, что упомянутый шаг определения статуса занятого блока содержит шаги, на которых предоставляют определенный набор данных отображения каждому ОВС, который отображает схему направляющего пути, ограничители блоков и связанные характеристики направляющего пути и используют конкретный ОВС для определения занятости блока на борту транспортного средства,включая конкретный ОВС, который использует набор данных отображения. 3. Способ по п.2, отличающийся тем, что шаг определения статуса занятости блока содержит шаги, на которых используют сервер для интерпретации занятости блока каждого транспортного средства и определяют статус занятости блока для всех блоков, связанных с сервером, основываясь на занятости блоков каждого транспортного средства,используя сервер. 4. Способ по п.1, отличающийся тем, что ОВС содержит процессор ОВС для выполнения функций ОВС, запоминающее устройство ОВС, при этом система управления дополнительно содержит дисплей ОВС на борту каждого транспортного средства для отображения данных и информации,при этом шаг управления движением одного транспортного средства содержит шаги, на которых интерпретируют статус занятости блока для вывода, по меньшей мере, одного сигнального показателя, по меньшей мере, одного показателя скорости и, по меньшей мере, одной границы движения для определенного транспортного средства, используя ОВС отображают, по меньшей мере, один из сигнальных показателей, показателей скорости,границ движения и маршрутов на дисплее ОВС определенного транспортного средства определяют последующее движение транспортного средства, основываясь, по меньшей мере, на одном из сигнальных показателей,показателей скорости и границ движения используя ОВС и принудительно осуществляют определенное последующее движение транспортного средства. 5. Способ по п. 1, отличающийся тем, что упомянутый шаг передачи статуса занятого блока содержит шаг передачи статуса занятости блока по радиоканалу от сервера к ОВС, так что каждый ОВС на борту каждого транспортного средства в конкретной области получает одинаковую информацию. 6. Способ по п.1, отличающийся тем, что упомянутый шаг управления движением одного 22457 транспортного средства содержит шаг,ограничивающий движение каждого транспортного средства, основываясь на наиболее ограничивающей интерпретации статуса занятости блока в комбинации с, по меньшей мере, одним из временных ограничений скорости, постоянных ограничений скорости и ограничений скорости,относящихся к транспортному средству. 7. Способ по п. 1, отличающийся тем, что дополнительно осуществляют мониторинг положения стрелки направляющего пути и включение информации расположения стрелки, как части статуса занятости блока. 8. Способ по п.1, отличающийся тем, что система управления дополнительно содержит, по меньшей мере, одну путевую стрелку и дисплей ОВС на борту каждого транспортного средства для отображения информации и данных, упомянутый способ дополнительно содержит шаги на которых отслеживают положение путевой стрелки сообщают серверу положение путевой стрелки передают положение путевой стрелки к ОВС и отображают положение путевой стрелки на дисплее ОВС. 9. Способ по п.1, отличающийся тем, что система управления дополнительно содержит бортовой аварийный сигнал, при этом для управления движением одного транспортного средства используют бортовой аварийный сигнал для информирования члена бригады транспортного средства информацией относящейся, по меньшей мере,к одному сигнальному показателю,показателю скорости или границам движения. 10. Способ по п.1, отличающийся тем, что на шаге определения статуса занятого блока используют, по меньшей мере, одно длину транспортного средства, начало расположения транспортного средства и конец расположения транспортного средства для определения того, когда блок больше не занят. 11. Способ управления движением множества железнодорожных транспортных средств вдоль длины железнодорожного пути, который разделен на множество блоков, с использованием системы управления, которая содержит беспроводный приемник, систему слежения за расположением транспортного средства,и беспроводный передатчик на борту каждого транспортного средства, сервер за бортом транспортных средств и систему связи за бортом транспортных средств,связанную с транспортными средствами и с сервером, упомянутый способ содержит следующие шаги определяют положение каждого железнодорожного транспортного средства вдоль пути,используя соответствующую систему слежения определяют соответствующие блоки, занятые каждым железнодорожным транспортным средством,отличающийся тем, что осуществляют передачу данных, показывающих занятость блоков каждым железнодорожным транспортным средством,к серверу по определенным временным интервалам с использованием системы связи определяют на сервере занятость блоков всеми железнодорожными транспортными средствами на пути, основываясь на блоках, занятых каждым железнодорожным транспортным средством осуществляют передачу данных, указывающих занятые блоки всеми железнодорожными транспортными средствами, от сервера ко всем железнодорожным транспортным средствам на пути по временным интервалам и управляют действием каждого транспортного средства с использованием данных, указывающих блоки,занятые всеми железнодорожными средствами. 12. Способ по п. 11, отличающийся тем, что дополнительно вычисляют профиль торможения транспортного средства для безопасного движения каждого транспортного средства по пути, используя данные,указывающие блоки,занятые другими транспортными средствами и управляют действиями каждого транспортного средства, основываясь на его соответствующем профиле торможения. 13. Способ по п. 11, отличающийся тем, что система управления дополнительно содержит, по меньшей мере, одну часть путевого оборудования вдоль пути, которое изменяет статус блоков вдоль пути для движения транспортных средств в блоках,и передатчик, сообщающий статус блоков,связанных с путевым оборудованием, при этом способ дополнительно содержит шаги, на которых осуществляют передачу статуса блока, на который воздействует часть путевого оборудования,к серверу осуществляют передачу данных, указывающих статус всех блоков, на которые воздействует путевое оборудование, вдоль пути и вычисляют профиль торможения транспортного средства для каждого транспортного средства, для безопасного движения транспортного средства,используя данные, указывающие блоки, занятые транспортными средствами, и данные, указывающие статусы блоков, на которые воздействует путевое оборудование. 14. Способ по п.11, отличающийся тем, что дополнительно вычисляют показания для, по меньшей мере, одного из транспортных средств для безопасного движения транспортного средства,используя данные, относящиеся к блокам, занятым другими железнодорожными транспортными средствами. 15. Способ по п.11, отличающийся тем, что дополнительно вычисляют показатели скорости для,по меньшей мере, одного из транспортных средств для безопасного движения транспортного средства,используя данные, относящиеся к блокам, занятым другими железнодорожными транспортными средствами. 16. Способ по п.11, отличающийся тем, что дополнительно вычисляют границы движения для,9 22457 по меньшей мере, одного из транспортных средств для безопасного движения транспортного средства,используя данные, относящиеся к блокам, занятым
МПК / Метки
МПК: B61L 27/04, B61L 25/04
Метки: средством, способ, информацией, обмене, управления, транспортным, основанного, расширенного
Код ссылки
<a href="https://kz.patents.su/11-ip22457-sposob-dlya-rasshirennogo-osnovannogo-na-obmene-informaciejj-upravleniya-transportnym-sredstvom.html" rel="bookmark" title="База патентов Казахстана">Способ для расширенного, основанного на обмене информацией, управления транспортным средством</a>
Предыдущий патент: Несамоходная передвижная реклама на колёсах
Следующий патент: Ветроэлектрическая установка
Случайный патент: Штамм чумного микроба Yersinia pestis КА-7, используемый в качестве тест-объекта для генетических и микробиологических исследований