Мультиориентационная операционная система и способ ее работы

Текст
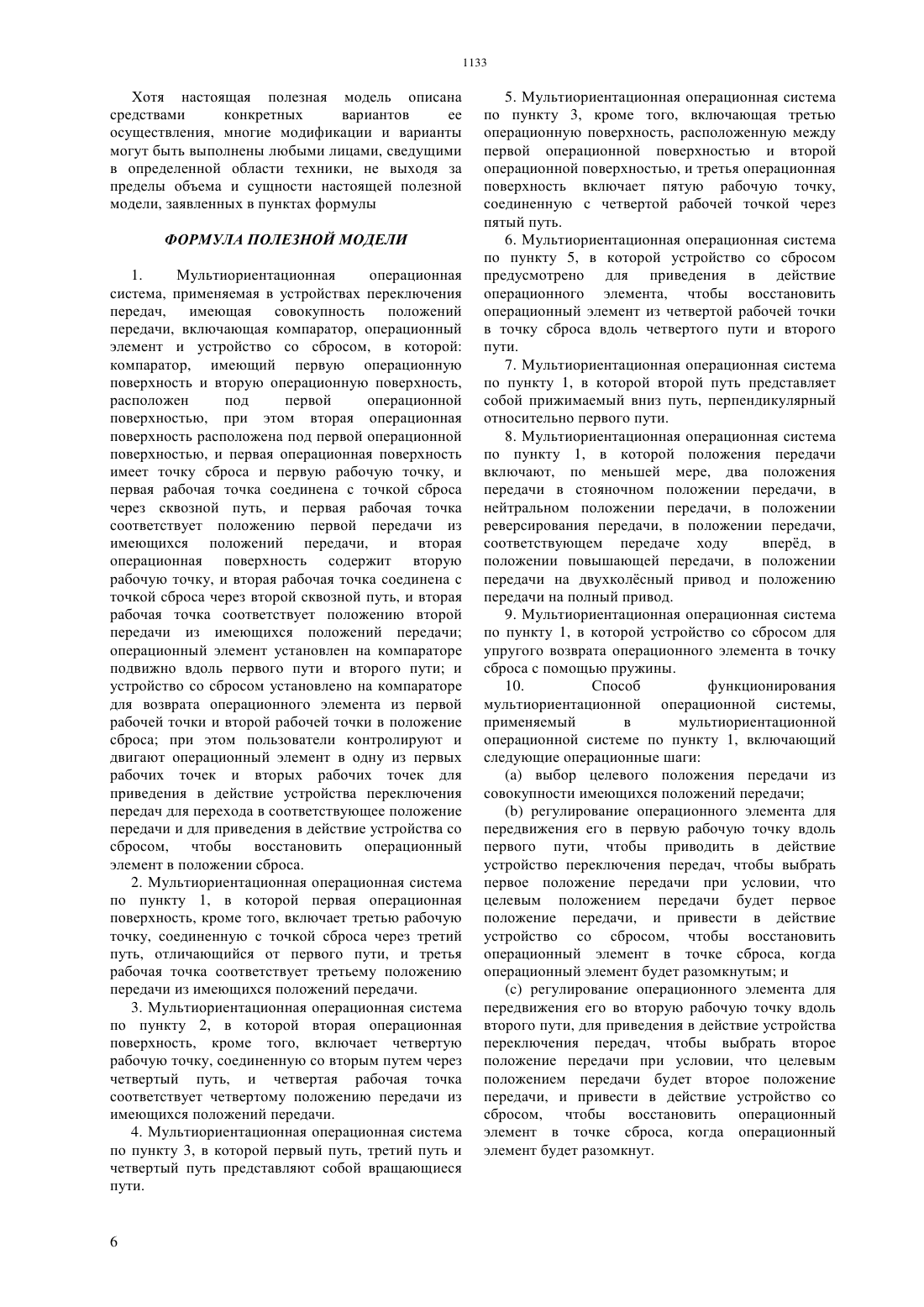
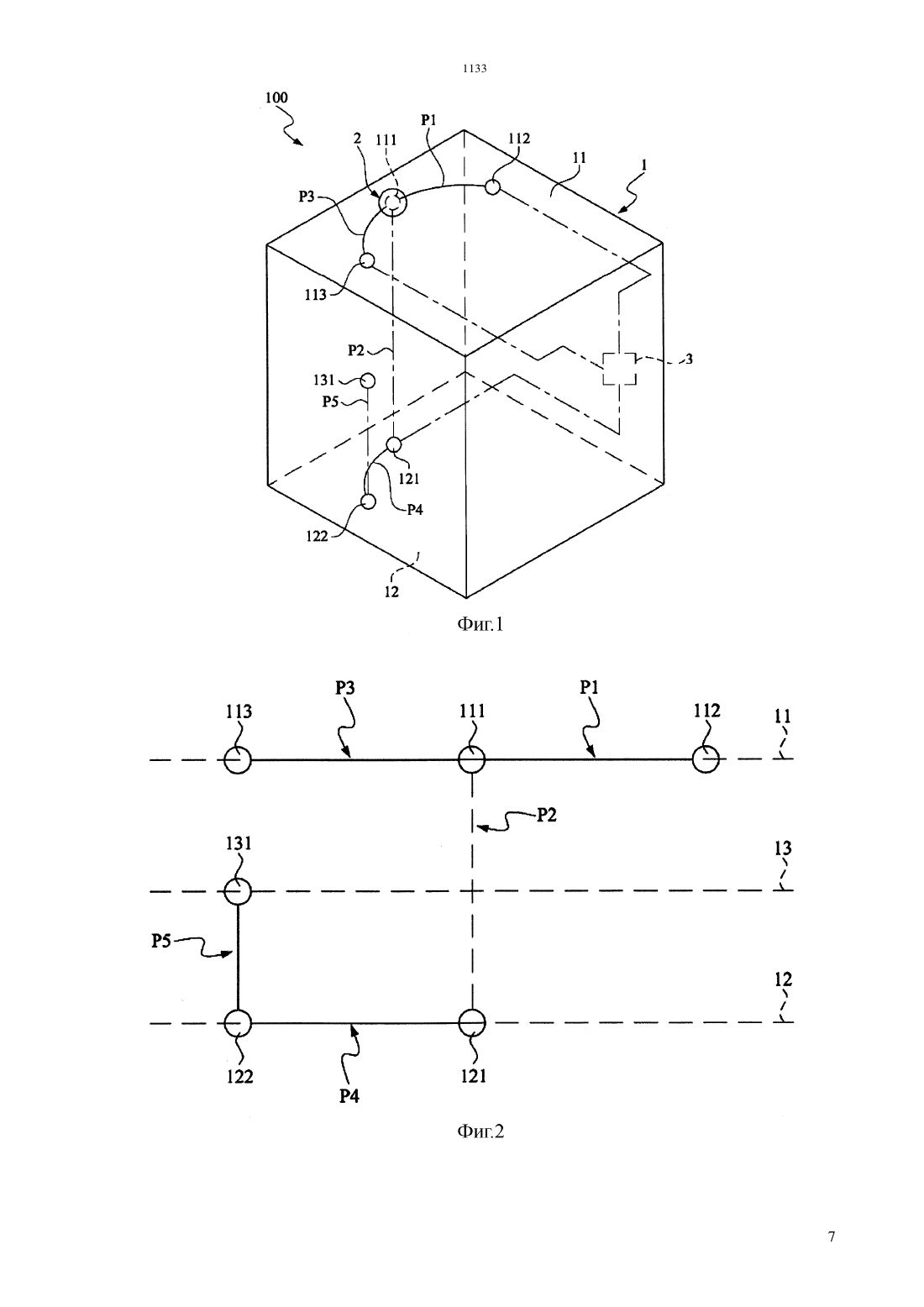
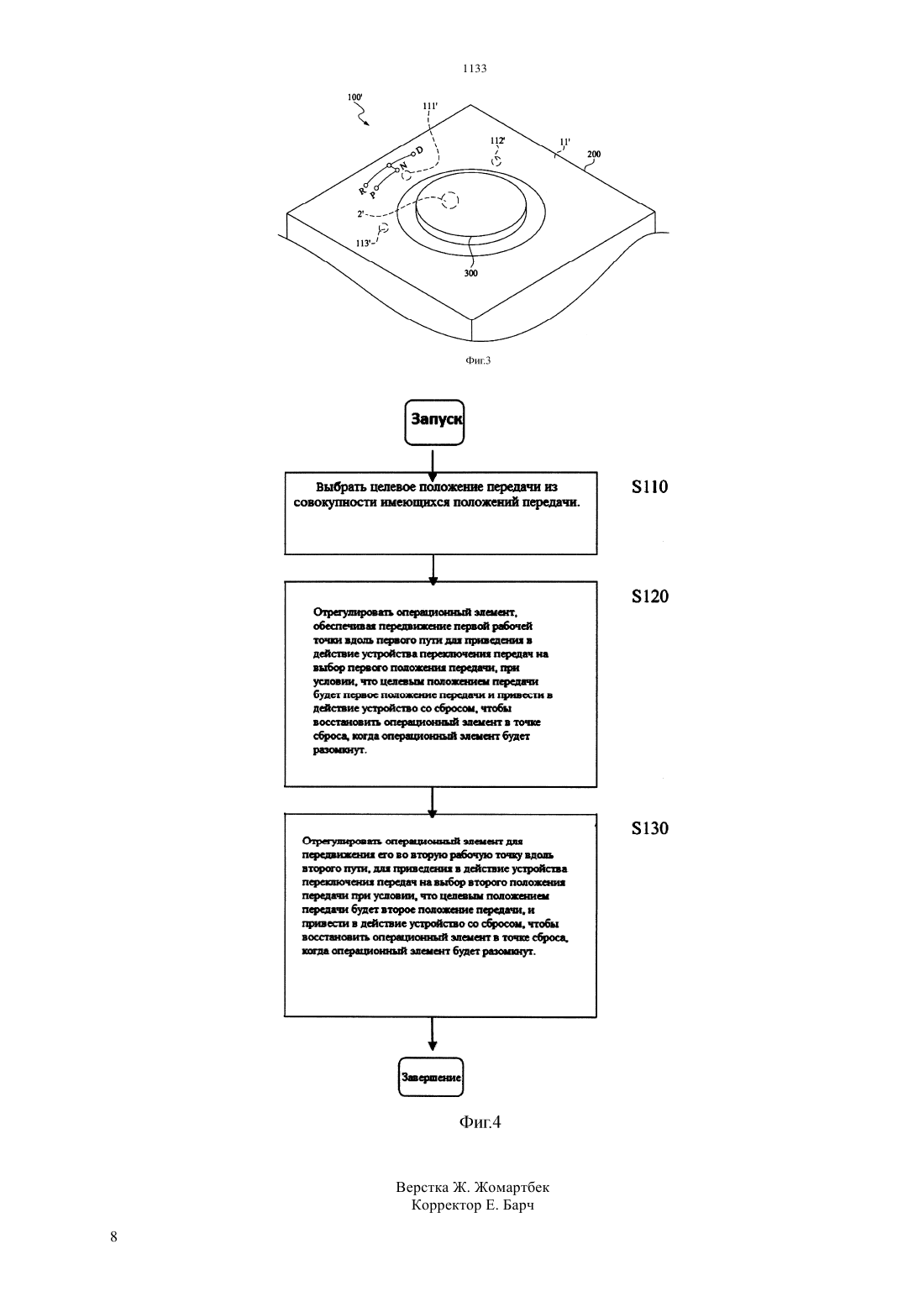
(51) 06 5/16 (2006.01) КОМИТЕТ ПО ПРАВАМ ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ МИНИСТЕРСТВА ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ПОЛЕЗНОЙ МОДЕЛИ К ПАТЕНТУ операционный элемент и устройство со сбросом. Компаратор включает первую операционную поверхность и вторую операционную поверхность,находящуюся под первой операционной поверхностью. Первая операционная поверхность включает точку сброса и первую рабочую точку,которая соединяется с точкой сброса через сквозной путь. Первая рабочая точка соответствует первому положению передачи. Вторая операционная поверхность включает вторую рабочую точку,которая соединяется с точкой сброса через второй сквозной путь. Вторая рабочая точка соответствует второму положению передачи. Операционный элемент подвижно расположен на компараторе. Устройство со сбросом расположено на компараторе для возврата операционного элемента в положение сброса.(73) Хуа-чуан Аутомобайл Информейшн Текникал Сэнтэ Ко., Лтд.(54) МУЛЬТИОРИЕНТАЦИОННАЯ ОПЕРАЦИОННАЯ СИСТЕМА И СПОСОБ ЕЕ РАБОТЫ(57) Предлагаются мультиориентационная операционная система и способ ее функционирования. Мультиориентационная операционная система включает компаратор, 1133 Настоящая полезная модель относится к мультиориентационной операционной системе и способу ее функционирования, и более конкретно, к мультиориентационной операционной системе и способу ее функционирования с множеством выборочных путей выполнения. В последние годы автомобильные устройства переключения передач в легковых автомобилях постепенно сменились механической трансмиссии на автоматическое переключение передач. Автоматическое переключение передач в устройствах переключения передач осуществляется обычно с помощью зубчатой передачи или а коническими шестернями вертикальной передачи. Поскольку зубчатая передача происходит в различных выборочных направлениях при переключении передачи, пользователи могут помнить положения передачи путем выбора направлений. Однако операция зубчатой передачи несколько сложна, и, таким образом, эти передачи используются все меньше и меньше. С другой стороны, конические шестерни вертикальной передачи имеют относительно упрощенную конструкцию, используя только два рабочих направления вверх и вниз. В отличие от зубчатой передачи конические шестерни вертикальной передачи требуют различных направлений работы при выборе передачи, так что, если водитель случайно переходит на ошибочную передачу или уделяет внимание положениям передачи, риск возникновения аварии возрастает. Кроме зубчато-стержневой передачи,конструкция электронной поворотной передачи предусмотрена для переключения передачи,используя для этого поворотный стол, при этом поворотный стол вращается два круговых цикла по часовой стрелке или против часовой стрелки для выбора передачи, и, таким образом, операция является простой. Однако существуют лишь два направления переключения передачи, таким образом, водитель должен обращать внимание на указание передачи на индикаторе при выборе передач, иначе водитель может перейти на ошибочную передачу, такую, как вертикальноуровневая передача. Поэтому автор настоящей полезной модели считает необходимым разработать новую мультиориентационную операционную систему и способ ее функционирования, при этом различные шестерни могут переключаться с помощью мультиориентационной операции для повышения удобства ее эксплуатации. В свете вышеизложенных проблем, связанных с обычными устройствами переключения передач,обычные устройства переключения передач в основном используют зубчатые механизмы переключения передач, вертикально-уровневые механизмы переключения передач или электронные поворотные механизмы переключения передач для переключения передач. Однако зубчатые механизмы переключения передач требуют относительно сложных операций, несмотря на то, что положения передачи очевидны вертикально-уровневые 2 устройства переключения передач и электронные поворотные устройства переключения передач работают с меньшим числом направлений переключения передач, и пользователи могут легко перейти на ошибочную передачу. Для устранения вышеизложенных проблем настоящая полезная модель предусматривает мультиориентационную операционную систему и способ ее функционирования для выбора передач различными путями, поскольку различные передачи имеют различные изменения пути переключения. С этой целью настоящая полезная модель обеспечивает более четкий выбор передач и значительно повышает удобство в эксплуатации. Для достижения вышеуказанной цели в настоящей полезной модели предлагается мультиориентационная операционная система,применяемая в устройствах переключения передач,имеющая совокупность зубчатых передач, и эта мультиориентационная операционная система включает компаратор,имеющий первую операционную поверхность и вторую операционную поверхность,находящуюся под первой операционной поверхностью, при этом первая операционная поверхность включает точку сброса и первую рабочую точку, при этом первая рабочая точка соединена с точкой сброса через сквозной путь, и первая рабочая точка соответствует положению первой передачи из имеющихся положений передачи, и вторую операционную поверхность, включающую вторую рабочую точку,при этом вторая рабочая точка соединена с точкой сброса через второй сквозной путь, и вторая рабочая точка соответствует положению второй передачи из имеющихся положений передачи операционный элемент установлен на компаратор подвижно вдоль первого пути и второго пути при этом устройство со сбросом установлено на компараторе для возвращения операционного элемента из первой рабочей точки и второй рабочей точки в положение сброса при этом пользователь контролирует и перемещает операционный элемент в одну из первых рабочих точек и вторых рабочих точек для приведения в действие устройства переключения передач для перехода в соответствующее положение передачи, и приводит в действие устройство со сбросом, чтобы восстановить операционный элемент в положение сброса. В предпочтительном варианте осуществления настоящей полезной модели первая операционная поверхность, кроме того, включает третью рабочую точку, соединенную с точкой сброса через третий путь, отличающийся от первого пути, при этом третья рабочая точка соответствует третьему положению передачи из имеющихся положений передачи. Предпочтительно,чтобы вторая операционная поверхность, кроме того, включала четвертую рабочую точку, соединенную со вторым путем через четвертый путь, при этом четвертая рабочая точка соответствует четвертому положению передачи из имеющихся положений передачи, при этом первый путь, третий путь и четвертый путь представляют собой вращательные пути. Кроме того,мультиориентационная операционная система включает третью операционную поверхность, расположенную между первой операционной поверхностью и второй операционной поверхностью, при этом третья операционная поверхность включает пятую рабочую точку, соединенную с четвертой рабочей точкой через пятый путь. Пятая рабочая точка соединена с четвертой рабочей точкой через пятый путь. При этом устройство со сбросом предусмотрено для приведения в действие операционного элемента, чтобы восстановить операционный элемент из четвертой рабочей точки в точку сброса вдоль четвертого пути и второго пути. В предпочтительном варианте осуществления настоящей полезной модели второй путь представляет собой прижимаемый вниз путь,перпендикулярный относительно первого пути. В предпочтительном варианте осуществления настоящей полезной модели, имеющиеся положения передачи включают, по меньшей мере, два положения передачи в стояночном положении передачи, в нейтральном положении передачи, в положении реверсирования передачи, в положении передачи на приводную шестерню, в положении повышающей передачи, в положении передачи на двухколсный привод и в положении передачи полного привода на передний и задний мосты. В предпочтительном варианте осуществления настоящей полезной модели устройство со сбросом предусмотрено для упругого возвращения операционного элемента в точку сброса с помощью пружины. В заключение, настоящая полезная модель устраняет проблемы прототипа с помощью предлагаемого метода эксплуатации мультиориентационной операционной системы,который включает следующие операционные шаги выбор целевого положения передачи из совокупности имеющихся положений передачи,когда целевое положение передачи выбирается в качестве первого положения передачи затем регулирование операционного элемента, чтобы перемещать первую рабочую точку вдоль первого пути для приведения в действие устройства переключения передач, чтобы выбрать первое положение передачи при этом приводное устройство со сбросом восстановит операционный элемент в точке сброса, когда операционный элемент будет расцеплен когда целевое положение передачи выбирается в качестве второго положения передачи, операционный элемент регулируется для его перемещения во вторую рабочую точку вдоль второго пути для приведения в действие устройства переключения передач, чтобы выбрать второе положение передачи, при этом приводное устройство со сбросом восстановит операционный элемент в точке сброса, когда операционный элемент будет расцеплен. В сравнении с обычным методом переключения передач,мультиориентационная операционная система и способ ее функционирования, согласно настоящей полезной модели,перемещает операционный элемент в различные рабочие точки по различным путям, так что пользователь может быстро и точно переключать в требуемое положение передачи по различным путям. В сравнении с обычным методом переключения передач, при котором совокупность имеющихся положений передачи перемещается в двух направлениях,настоящая полезная модель позволяет повысить удобство эксплуатации. Кроме того, настоящая полезная модель включает устройство со сбросом,так что когда пользователь перемещает операционный элемент в требуемое положение передачи, пользователь может освободить из зацепления операционный элемент, чтобы в гибком режиме восстановить операционный элемент в положение сброса. Фиг.1. Представляет собой вид в перспективе мультиориентационной операционной системы в соответствии с предпочтительным вариантом осуществления настоящей полезной модели Фиг.2. Представляет собой двумерную схему устройства в разрезе,иллюстрирующую соотношение между первой операционной поверхностью, второй операционной поверхностью и третьей операционной поверхностью мультиориентационной операционной системы,согласно настоящей полезной модели Фиг.3. Представляет собой вид в перспективе,иллюстрирующий практическое осуществление мультиориентационной операционной системы,согласно настоящей полезной модели и Фиг.4. Представляет собой графическое изображение способа функционирования мультиориентационной операционной системы,согласно настоящей полезной модели. Подробное описание предпочтительных вариантов осуществления настоящей полезной модели Технические характеристики, сущность и преимущества настоящей полезной модели становятся более очевидными из нижеследующего подробного описания предпочтительных вариантов осуществления настоящей полезной модели со ссылками на сопроводительные чертежи. Поскольку существует множество вариантов осуществления настоящей полезной модели, они не могут быть подробно описаны один к одному, и только два предпочтительных варианта осуществления настоящей полезной модели представлены здесь для иллюстрации настоящей полезной модели. Описанные здесь варианты осуществления настоящей полезной модели и прилагаемые чертежи следует рассматривать как иллюстративные, а не ограничивающие материалы. Со ссылкой на фиг.1 и 2, представляющие вид в перспективе мультиориентационной операционной системы и двумерную схему устройства в разрезе,иллюстрирующую соотношение между первой операционной поверхностью, второй операционной поверхностью и третьей операционной поверхностью мультиориентационной операционной системы в соответствии с предпочтительным вариантом осуществления 3 настоящей полезной модели, соответственно,мультиориентационная операционная система 100 включает компаратор 1, операционный элемент 2 и устройство со сбросом 3. При этом мультиориентационная операционная система 100,применяемая в устройствах переключения передач,имеет совокупность положений передачи, и указанные имеющиеся положения передачи включают, по меньшей мере, два положения передачи, но не только, в стояночном положении передачи, в нейтральном положении передачи, в положении реверсирования передачи, в положении передачи, соответствующем передаче ходу вперд, в положении повышающей передачи, в положении передачи на двухколсный привод и в положении передачи полного привода на передний и задний мосты. Компаратор 1 имеет первую операционную поверхность 11, вторую операционную поверхность 12 и третью операционную поверхность 13. Первая операционная поверхность 11 включает точку сброса 111, первую рабочую точку 112 и третью рабочую точку 113. Первая рабочая точка 112 соединена с точкой сброса 111 через сквозной путь Р 1 третья рабочая точка 113 соединена с точкой сброса 111 через третий путь Р 3, при этом третий путь Р 3 отличается от первого пути Р 1. При этом первый путь Р 1 и третий путь Р 3 представляют собой вращающиеся пути, и первая рабочая точка 112 соответствует положению первой передачи из имеющихся положений передачи, и третья рабочая точка 113 соответствует третьему положению передачи из имеющихся положений передачи. Вторая операционная поверхность 12 находится под первой операционной поверхностью 11, и вторая операционная поверхность 12 включает вторую рабочую точку 121 и четвертую рабочую точку 122. Вторая рабочая точка 121 соединена с точкой сброса 111 через второй сквозной путь Р 2, и второй путь Р 2 отличается от первого пути Р 1 и третьего пути Р 3. При этом второй путь Р 2 перпендикулярен к первому пути Р 1 и к третьему пути Р 3, причем второй путь Р 2 представляет собой путь нажатия вниз. Четвертая рабочая точка 122 соединена со второй рабочей точкой 121 через четвертый путь Р 4. При этом четвертый путь Р 4 перпендикулярен ко второму пути Р 2, и вторая рабочая точка 121 соответствует положению второй передачи из имеющихся положений передачи, и четвертая рабочая точка 122 соответствует четвертому положению передачи из имеющихся положений передачи. Третья операционная поверхность 13 расположена между первой операционной поверхностью 11 и второй операционной поверхностью 12, при этом третья операционная поверхность 13 включает пятую рабочую точку 131, соединенную с четвертой рабочей точкой 122 через пятый путь Р 5. Операционный элемент 2 установлен на компараторе 1 подвижно вдоль первого пути Р 1,второго пути Р 2, третьего пути Р 3, четвертого пути Р 4 и пятого пути Р 5. Устройство со сбросом 3 расположено на компараторе 1 для возврата операционного элемента 2 из первой рабочей точки 112, второй рабочей точки 121 и третьей рабочей точки 113 в точку сброса 111. При этом устройство со сбросом 3 предусмотрено для возврата операционного элемента 2 из четвертой рабочей точки 122 в точку сброса 111 через вторую рабочую точку 121. В заключение вышеизложенного описания, точка сброса 111 эквивалентна контрольной точке и первое положение передачи, соответствующее первой рабочей точке 112, представляет собой положение передачи, соответствующее ходу вперд передачи , и второе положение передачи,соответствующее второй рабочей точке 121,представляет собой положение передачи , и третье положение передачи, соответствующее третьей рабочей точке 113, представляет собой положение реверсирования передачи , и четвертое положение передачи, соответствующее четвертой рабочей точке 122, представляет собой стояночное положение передачи (Р). При этом пользователь контролирует операционный элемент 2 и перемещает его в одну из первых рабочих точек 112, вторых рабочих точек 121, третьих рабочих точек 113 и четвертых рабочих точек 122 для приведения в действие устройства переключения передач для перехода в соответствующее положение передачи. После того, как пользователь выбрал положение передачи и освободил из зацепления операционный элемент 2, устройство со сбросом 3 восстанавливает операционный элемент 2 в точке сброса 111. Кроме того, первый путь Р 1, второй путь Р 2,третий путь Р 3, четвертый путь Р 4 и пятый путь Р 5 представляют собой ходовые канавки, и устройство со сбросом 3 предусмотрено для упругого возврата операционного элемента 2 в точку сброса 111 с помощью пружины. Кроме того, устройство со сбросом 3 имеет пружину, по обеим сторонам и в основании с точкой сброса 111, так что когда возвращающийся элемент 2 вращается по часовой стрелке вдоль первого пути Р 1,возвращающийся элемент 2 упруго восстанавливается в точке сброса 111, и когда возвращающийся элемент 2 вращается против часовой стрелки вдоль третьего пути Р 3,возвращающийся элемент 2 упруго восстанавливается в точке сброса 111, и когда второй путь Р 2 перемещается и прижимается вниз,возвращающийся элемент 2 упруго восстанавливается в точке сброса 111. Поскольку операционное направление четвертого пути Р 4 то же, что и второго пути Р 2, то когда операционный элемент 2 движется в четвертую рабочую точку 122,пружина (не показана на рисунке) по обеим сторонам или в основании с точкой сброса 111 предусмотрена для упруго возвращающегося операционного элемента 2 из четвертой рабочей точки 122 в точку сброса 111. Поэтому когда пользователю необходимо переключить положение передачи в стояночное положение передачи,соответствующее четвертой рабочей точке 122, 1133 пользователь может переместить операционный элемент 2 вдоль пятого пути Р 5 в пятую рабочую точку 131. Теперь пружина устройства со сбросом 3 защелкнет операционный элемент 2 в пятой рабочей точке 131. Когда пользователю необходимо освободить из зацепления стояночное положение передачи, пользователь может нажать вниз операционный элемент 2 для упругого восстановления операционного элемента 2 в точке сброса 111. В других вариантах осуществления настоящей полезной модели, устройство со сбросом может представлять собой любой другой электромагнитный возвращающийся компонент и не ограничивается пружиной, использованной с данном предпочтительном варианте осуществления настоящей полезной модели. Если устройство со сбросом 3 установлено между четвертой рабочей точкой 122 и третьей рабочей точкой 113, нет необходимости в наличии пятой рабочей точки 131,чтобы зацеплять возвращающийся элемент. Со ссылкой на фиг.1 и 3, на фиг.3 представлен вид в перспективе практического осуществления мультиориентационной операционной системы,согласно настоящей полезной модели. Мультиориентационная операционная система 100 представляет собой практическое осуществление мультиориентационной операционной системы 100,при этом мультиориентационная операционная система 100 применяется в устройстве переключения передач 200,и устройство переключения передач 200 имеет первую операционную поверхность 11, и операционный поворотный стол 300 расположен на устройстве переключения передач 200, при этом операционный элемент 2 мультиориентационной операционной системы 100 представляет собой тригтерный участок операционного поворотного стола 300, и операционный элемент 3 соответствует точке сброса 111 и первая рабочая точка 112 соответствует переднему положению передачи ,и третья рабочая точка 113 соответствует положению реверсирования передачи . Лица,обладающие знаниями в соответствующей области техники, понимают, что другие элементы, например,вторая операционная поверхность (не показана на фиг.3) располагаются в устройстве переключения передач 200. На фиг.1 и 4, фиг.4 представляет собой блоксхему способа осуществления мультиориентационной операционной системы,согласно настоящей полезной модели, при этом указанный способ осуществления включает следующие операционные шаги 110 Выбрать целевое положение передачи из совокупности имеющихся положений передачи.120 После того, как выбрано целевое положение передачи в качестве первого положения передачи, отрегулировать операционный элемент 2 на перемещение в первую рабочую точку 112 вдоль первого пути Р 1 для приведения в действие устройства переключения передач 200, чтобы выбрать первое положение передачи 111, и привести в действие устройство со сбросом 3, чтобы восстановить операционный элемент 2 в точке сброса 111, когда операционный элемент 2 разомкнут.130 После того, как выбрано целевое положение передачи в качестве второго положения передачи, отрегулировать операционный элемент 2 на перемещение во вторую рабочую точку 113 вдоль второго пути Р 2 для приведения в действие устройства переключения передач 200, чтобы выбрать второе положение передачи, и привести в действие устройство со сбросом 3, чтобы восстановить операционный элемент 2 в точке сброса 111, когда операционный элемент 2 разомкнут. В этом предпочтительном варианте осуществления настоящей полезной модели, первое положение передачи относится к переднему положению передачи хода вперед , и второе положение передачи относится к нейтральному положению передачи , при этом применение других имеющихся положений передачи является аналогичным и, следовательно, его описание здесь не повторяется. Лицам, обладающим обычными знаниями в соответствующей области техники, должны быть понятны нижеследующие данные после ознакомления с технологией, раскрытой в настоящей полезной модели. 1. В мультиориентационной операционной системе, согласно настоящей полезной модели,операционный элемент движется в различные рабочие точки по различным путям, так что пользователь может различными путями быстро и точно выбирать искомое положение передачи. В сравнении с прототипом, выбирающим из совокупности имеющихся положений передачи в двух направлениях, настоящая полезная модель повышает удобство оборудования в эксплуатации. 2. Настоящая полезная модель имеет устройство со сбросом, так что когда пользователь перемещает операционный элемент в требуемое положение передачи,пользователь может высвободить операционный элемент из зацепления, чтобы в упругом режиме восстановить операционный элемент в положении сброса. 3. Устройство со сбросом имеет совокупность вариантов осуществления, например, использование магнетизма магнитных элементов, но настоящая полезная модель не ограничивается только упругим элементом, раскрытым в данном предпочтительном варианте осуществления настоящей полезной модели. 4. В сравнении с обычными методами электронного переключения передач с использованием поворотных платформ,предлагаемая мультиориентационная операционная система, согласно настоящей полезной модели,предусматривает различные направления переключения передач для работы через различные пути, так что пользователи могут работать с системой, пользуясь сенсорными методами, при этом не требуется особое внимание на показания переключателя передач, что повышает надежность оборудования в эксплуатации. 5 Хотя настоящая полезная модель описана средствами конкретных вариантов ее осуществления, многие модификации и варианты могут быть выполнены любыми лицами, сведущими в определенной области техники, не выходя за пределы объема и сущности настоящей полезной модели, заявленных в пунктах формулы ФОРМУЛА ПОЛЕЗНОЙ МОДЕЛИ 1. Мультиориентационная операционная система, применяемая в устройствах переключения передач, имеющая совокупность положений передачи, включающая компаратор, операционный элемент и устройство со сбросом, в которой компаратор, имеющий первую операционную поверхность и вторую операционную поверхность,расположен под первой операционной поверхностью, при этом вторая операционная поверхность расположена под первой операционной поверхностью, и первая операционная поверхность имеет точку сброса и первую рабочую точку, и первая рабочая точка соединена с точкой сброса через сквозной путь, и первая рабочая точка соответствует положению первой передачи из имеющихся положений передачи, и вторая операционная поверхность содержит вторую рабочую точку, и вторая рабочая точка соединена с точкой сброса через второй сквозной путь, и вторая рабочая точка соответствует положению второй передачи из имеющихся положений передачи операционный элемент установлен на компараторе подвижно вдоль первого пути и второго пути и устройство со сбросом установлено на компараторе для возврата операционного элемента из первой рабочей точки и второй рабочей точки в положение сброса при этом пользователи контролируют и двигают операционный элемент в одну из первых рабочих точек и вторых рабочих точек для приведения в действие устройства переключения передач для перехода в соответствующее положение передачи и для приведения в действие устройства со сбросом, чтобы восстановить операционный элемент в положении сброса. 2. Мультиориентационная операционная система по пункту 1, в которой первая операционная поверхность, кроме того, включает третью рабочую точку, соединенную с точкой сброса через третий путь, отличающийся от первого пути, и третья рабочая точка соответствует третьему положению передачи из имеющихся положений передачи. 3. Мультиориентационная операционная система по пункту 2, в которой вторая операционная поверхность, кроме того, включает четвертую рабочую точку, соединенную со вторым путем через четвертый путь, и четвертая рабочая точка соответствует четвертому положению передачи из имеющихся положений передачи. 4. Мультиориентационная операционная система по пункту 3, в которой первый путь, третий путь и четвертый путь представляют собой вращающиеся пути. 5. Мультиориентационная операционная система по пункту 3, кроме того, включающая третью операционную поверхность, расположенную между первой операционной поверхностью и второй операционной поверхностью, и третья операционная поверхность включает пятую рабочую точку,соединенную с четвертой рабочей точкой через пятый путь. 6. Мультиориентационная операционная система по пункту 5, в которой устройство со сбросом предусмотрено для приведения в действие операционного элемента, чтобы восстановить операционный элемент из четвертой рабочей точки в точку сброса вдоль четвертого пути и второго пути. 7. Мультиориентационная операционная система по пункту 1, в которой второй путь представляет собой прижимаемый вниз путь, перпендикулярный относительно первого пути. 8. Мультиориентационная операционная система по пункту 1, в которой положения передачи включают, по меньшей мере, два положения передачи в стояночном положении передачи, в нейтральном положении передачи, в положении реверсирования передачи, в положении передачи,соответствующем передаче ходу вперд, в положении повышающей передачи, в положении передачи на двухколсный привод и положению передачи на полный привод. 9. Мультиориентационная операционная система по пункту 1, в которой устройство со сбросом для упругого возврата операционного элемента в точку сброса с помощью пружины. 10. Способ функционирования мультиориентационной операционной системы,применяемый в мультиориентационной операционной системе по пункту 1, включающий следующие операционные шаги выбор целевого положения передачи из совокупности имеющихся положений передачи регулирование операционного элемента для передвижения его в первую рабочую точку вдоль первого пути, чтобы приводить в действие устройство переключения передач, чтобы выбрать первое положение передачи при условии, что целевым положением передачи будет первое положение передачи, и привести в действие устройство со сбросом, чтобы восстановить операционный элемент в точке сброса, когда операционный элемент будет разомкнутым и регулирование операционного элемента для передвижения его во вторую рабочую точку вдоль второго пути, для приведения в действие устройства переключения передач, чтобы выбрать второе положение передачи при условии, что целевым положением передачи будет второе положение передачи, и привести в действие устройство со сбросом, чтобы восстановить операционный элементв точке сброса, когда операционный элемент будет разомкнут.
МПК / Метки
МПК: C06F 5/16
Метки: мультиориентационная, работы, система, операционная, способ
Код ссылки
<a href="https://kz.patents.su/8-u1133-multiorientacionnaya-operacionnaya-sistema-i-sposob-ee-raboty.html" rel="bookmark" title="База патентов Казахстана">Мультиориентационная операционная система и способ ее работы</a>
Металлосодержащая операционная карта и способ ее изготовления

Номер патента: 27234
Опубликовано: 15.08.2013
Авторы: ВАРГА, Стивен, МОРРИЛЛ ВЕББ, Лиза, Энн
МПК: G06K 19/02
Метки: изготовления, металлосодержащая, операционная, способ, карта
Текст:
...та по п.16,отличающаяся тем,что далее включает изоляционный материал, размещенный в полости таким образом, что указанный изоляционный материал электрически изолирует микрочип от тела карты. 19. Операционная карта по п.16,отличающаяся тем, что микрочип расположен существенно близко к первой поверхности. 20. Операционная карта по п.15,отличающаяся тем, что оборотная пластина имеет,по меньшей мере, одно измерение, которое меньше размера тела...
Операционная система для модульных телефонов-автоматов
Номер патента: 6940
Опубликовано: 15.01.1999
Авторы: Франсиско Ибаньес Паломеке, Хосе Мир Серпия
МПК: H04M 17/00
Метки: модульных, система, телефонов-автоматов, операционная
Формула / Реферат:
Изобретение относится к операционной системе для модульных телефонов-автоматов, содержащей соединенные между собой блок концентрации сообщений и центральный оперативный блок, предназначенный для управления блоком концентрации сообщений в качестве входного блока, а также для управления дисплеями оператора системы и помощи при обращениях к системе и управлении при прерываниях посредством вспомогательных принтеров и экранов для диспетчеров, при...
Ракетный двигатель малой тяги для космического летательного аппарата, система и способ работы (варианты)
Номер патента: 24452
Опубликовано: 15.08.2011
Авторы: ЭМСЕЛЛЕМ, Грегори, ЛАРИГАЛЬДИ, Серж
Метки: летательного, двигатель, работы, аппарата, космического, тяги, варианты, способ, малой, ракетный, система
Формула / Реферат:
Ракетный двигатель (1) малой тяги имеет главную камеру (1), образованную внутри трубы (2). Труба имеет продольную ось, определяющую ось (4) тяги; инжектор (8) вводит ионизируемый газ в трубу на одном конце главной камеры. Ионизатор (124) ионизирует введенный газ в главной камере (6). Первый генератор (12, 14) магнитного поля и генератор (18) электромагнитного поля создают ускоряющее поле пондеромоторной силы, обусловленной магнитными полями,...
Система управления стояночным тормозом
Номер патента: 1814
Опубликовано: 15.03.1995
Автор: Халидуллин Олег Ханышевич
МПК: B60T 7/12
Метки: система, стояночным, управления, тормозом
Формула / Реферат:
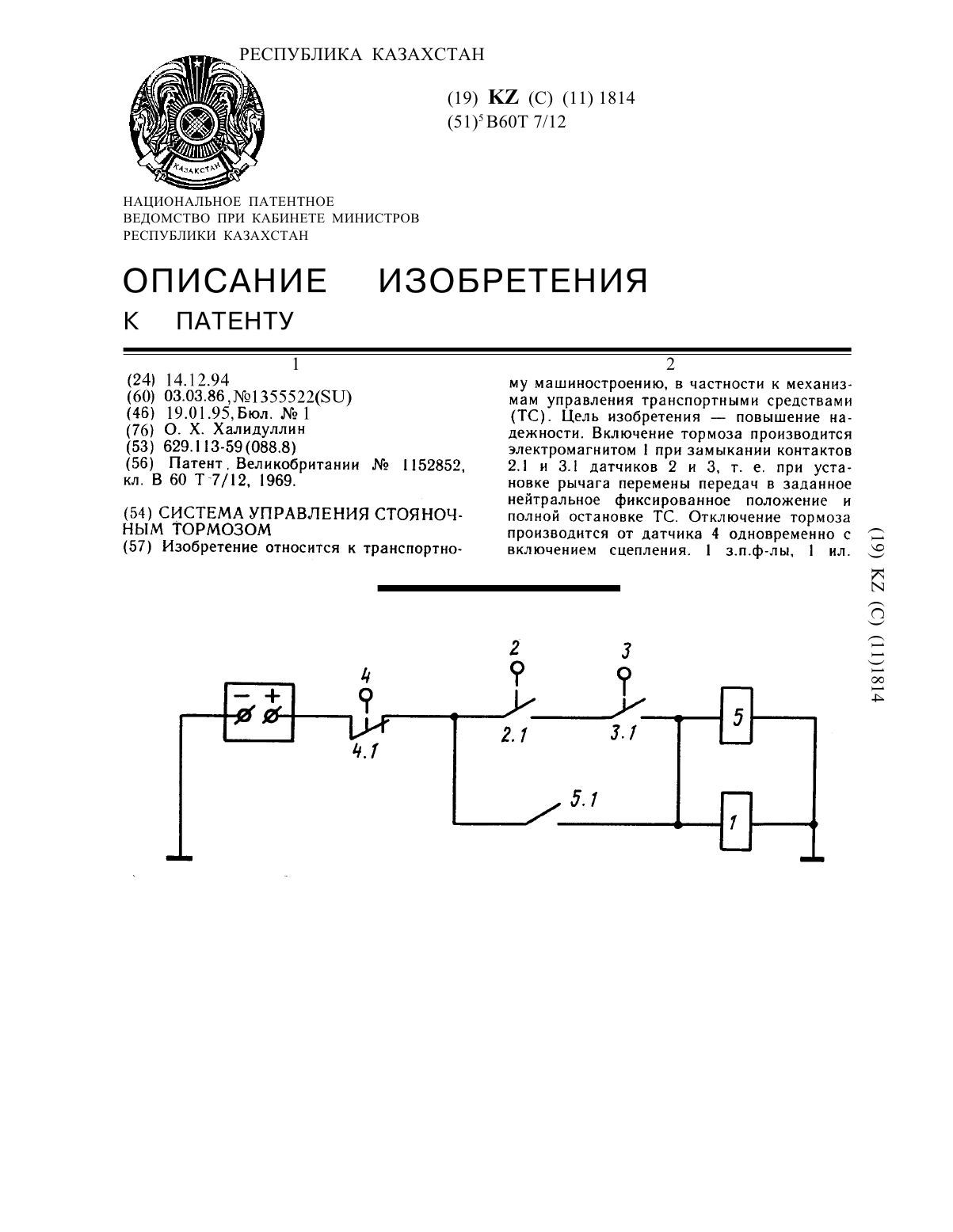
Изобретение относится к транспортному машиностроению, в частности к механизмам управления транспортными средствами (ТС). Цель изобретения — повышение надежности. Включение тормоза производится электромагнитом 1 при замыкании контактов 2.1 и 3.1 датчиков 2 и 3, т. е. при установке рычага перемены передач в заданное нейтральное фиксированное положение и полной остановке ТС. Отключение тормоза производится от датчика 4 одновременно с включением...
Система автоматического сбора и передачи показаний счетчиков электроэнергии
Номер полезной модели: 653
Опубликовано: 15.02.2011
Авторы: Шарапиев Тимур Сайлауханович, Мутанов Галимкаир Мутанович, Курмангалиев Тимур Болатович, Квасов Андрей Иванович
МПК: G05D 7/01
Метки: показаний, счетчиков, сбора, система, автоматического, электроэнергии, передачи
Формула / Реферат:
Полезная модель е относится к автоматическим системам сбора и передачи данных счетчиков по линии электропередач. Задачей полезной модели является упрощение системы, а также повышение точности измерения потребляемой энергии потребителями. Технический результат состоит в повышении надежности передачи данных за счет исключения помех. Сущность полезной модели заключается в следующем. Предложена система автоматического сбора и передачи показаний...
Предыдущий патент: Электронная медиа дисплейная система
Следующий патент: Рекламный конверт
Случайный патент: Режущее устройство (варианты), муфта (варианты) и держатель резца для указанного режущего устройства