Способ и система спутникового позиционирования

Формула / Реферат
Согласно настоящему изобретению, каждый навигационный спутник (1) проверяет автономным образом существенную информацию, которую он передает пользователям, посредством однонаправленных линий связи, принимаемых с опорных маяков (11).
Текст
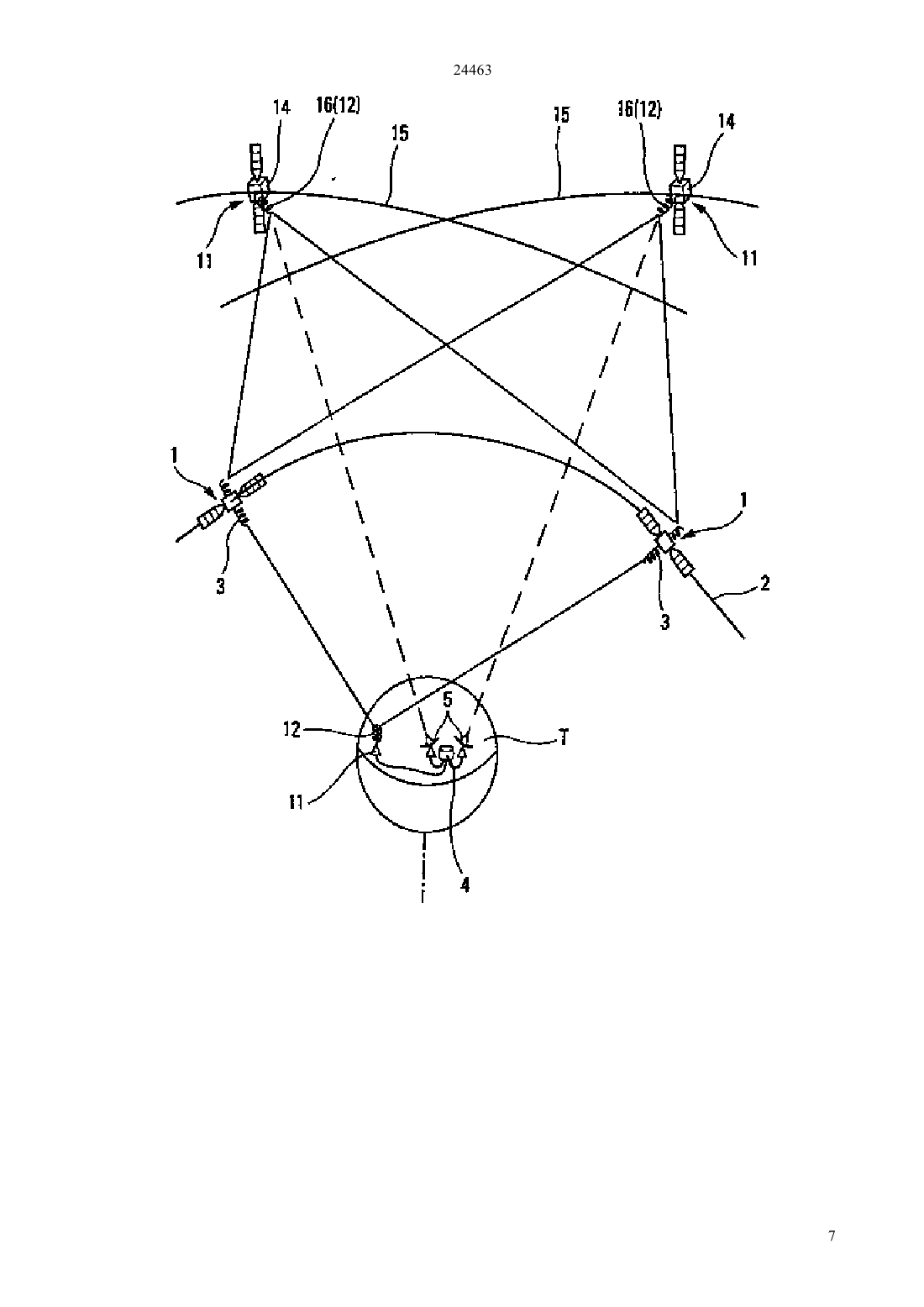
(51) 01 5/14 (2009.01) 01 5/04 (2009.01) 64 1/10 (2009.01) 04 7/185 (2009.01) КОМИТЕТ ПО ПРАВАМ ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ МИНИСТЕРСТВА ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН(57) Согласно настоящему изобретению, каждый навигационный спутник (1) проверяет автономным образом существенную информацию, которую он передает пользователям,посредством однонаправленных линий связи, принимаемых с опорных маяков (11).(74) Русакова Нина Васильевна Жукова Галина Алексеевна Ляджин Владимир Алексеевич 24463 Настоящее изобретение относится к системам спутникового наземного позиционирования. Известно,что системы спутникового позиционирования содержат созвездие навигационных спутников, размещенных на средневысотных орбитах (порядка 25000 км) вокруг Земли. Эти навигационные спутники и их орбиты обычно называются МЕО-спутниками средневысотная околоземная орбита), в данной области техники. МЕО-спутники равномерно распределены по нескольким орбитальным плоскостям, так что, в любой точке Земли,пользователь может видеть несколько МЕОспутников, то есть, быть на прямых линиях с ними(по меньшей мере тремя, однако, четырьмя, если пользователь желает узнать свою высоту), и выводить свои собственные наземные координаты из этого. Каждый МЕО-спутник имеет атомные часы высокой стабильности и точности, а также электронный элемент оборудования, который адресует наземным пользователям сообщения,содержащие скорректированное время(относительно общего опорного сигнала) и эфемериды спутника. На основе этих сообщений,принятых с нескольких МЕО-спутников,пользователь определяет свое расстояние от различных спутников в прямой видимости и,следовательно,выводит из него свое местоположение в наземных координатах. Чтобы гарантировать номинальную работу созвездия МЕОспутников, наземный центр управления выполняет измерение орбиты и бортового времени для каждого МЕО-спутника. Этот центр управления вычисляет эфемериды МЕО-спутников и поправку времени,которые должны транслироваться каждым МЕОспутником в предстоящие промежутки времени. Подобное решение описано, например, в патенте 21 82341, 01 5/14, 2002 год. Основной недостаток этих систем наземного позиционирования состоит в том, что качество позиционирования наземных пользователей основано на качестве эфемерид и скорректированного времени,транслируемых каждым МЕО-спутником. Поэтому, вслед за ошибкой центра управления или неисправности на борту МЕО-спутника, может случиться, что реальное местоположение,скорректированное время и/или эфемериды, транслируемые одним или более МЕО-спутниками, становятся ложными, тем самым,вызывая увеличение погрешности позиционирования для всех пользователей в зоне видимости спутников. Ошибка в итоге будет обнаружена и исправлена центром управления,который отслеживает МЕО-спутники, но, между тем,определенные пользователи,которые пользуются системой для важных функций,например, навигации, могут оказаться в ситуации крайней небезопасности. Уже было предложено несколько решений для изменения конструкции МЕО-спутников и их синхронизации по внешним опорным тактовым сигналам, с тем чтобы повысить достоверность сообщений,передаваемых МЕО-спутниками,Однако, во всех этих решениях, обнаружение аномалий на МЕО-спутниках гарантируется сетью наземных станций мониторинга, которые передают в центр управления информационный сигнал касательно этих аномалий, а исправление последних поручается упомянутому центру управления. Дополнительно, чтобы быть эффективными, эти решения вводят в действие, по меньшей мере,пятьдесят станции мониторинга,постоянно соединенных с упомянутым центром управления параллельно, посредством многочисленных каналов. Это имеет следствием высокие затраты на монтаж и использование. Более того, обнаружение аномалий сетью наземных станций мониторинга служит причиной сильного ослабления в точности нахождения местоположения МЕО-спутников. Более точно, для конкретного МЕО-спутника,все измерения расстояний выполняются с наземных станций,которые, поэтому, все расположены в пределах уменьшенного пространственного угла, так как диаметр земли мал по отношению к диаметру МЕОорбит. В результате, точность в горизонтальной плоскости ограничивается, соответственно, снижая надежность мгновенного обнаружения аномалий. Дополнительно, все измерения, выполняемые такой сетью наземных станций мониторинга,нарушаются локальными эффектами(тропосферными,ионосферными ошибками,ошибками многолучевого распространения), тем самым, вызывая погрешности измерений, которые ухудшают достоверность обнаружения аномалий, и создают опасность формирования ложных предупредительных сигналов,если было зафиксировано пороговое значение допуска, очень близкое к этим погрешностям. Дополнительный недостаток обнаружения аномалий сетью наземных станций мониторинга является результатом времени запаздывания между моментом, когда возникает аномалия на МЕОспутнике, и мгновением, когда пользователь, в конечном счете, оповещен об этой аномалии. Более точно, цепь обнаружения/уведомления включает в себя всемирную сеть станций, центр управления,который на основе всех измерений станций, будет обнаруживать аномалию,станции для транслирования предупредительного сообщения на спутники,и систему для ретрансляции предупредительного сообщения на борт МЕОспутника. Эта длинная и сложная цепь вызывает время запаздывания между наступлением аномалии и уведомлением пользователей, которое едва ли совместимо с высочайшими требованиями надежности в эксплуатации, например, такими как применимые в области аэронавтики. Цель настоящего изобретения состоит в том,чтобы исправить эти недостатки. 24463 Для этой цели, согласно изобретению, способ позиционирования пользователя на Земле,упомянутый способ внедряет множество навигационных спутников, которые размещены на средневысотных орбитах и которые управляются по меньшей мере одним наземным центром управления, каждый из упомянутых навигационных спутников передает первую информацию о времени и местоположении, которые индивидуальны для него, примечателен тем, что- множество опорных маяков, управляемых упомянутым наземным центром управления, и при этом каждый способен передавать специальную вторую информацию о времени и местоположении,а также специальный радиоэлектрический сигнал,распределены в пространстве и- на борту каждого навигационного спутника- детектируют упомянутую передаваемую вторую информацию о времени и местоположении по меньшей мере некоторыми из упомянутых опорных маяков- вычисляют первые значения и вторые значения,соответственно представляющие расстояния между упомянутым навигационным спутником и каждым из упомянутых маяков, и скорость изменения этих расстояний, на основе упомянутой первой и второй информации о времени и местоположении- измеряют изменение в доплеровской частоте,появляющееся в упомянутых передаваемых радиоэлектрических сигналах,упомянутыми опорными маяками- вычисляют третьи значения и четвертые значения,соответственно представляющие расстояния между упомянутым навигационным спутником и каждым из упомянутых маяков, и скорость изменения этих расстояний, на основе упомянутых изменений в доплеровской частоте- для каждого опорного маяка, сравнивают упомянутое первое значение расстояния и упомянутое третье значение расстояния, а также упомянутое второе значение скорости изменения расстояния и упомянутое четвертое значение скорости изменения расстояния генерируют сигнал,представляющий результаты упомянутых сравнений и- упомянутый навигационный спутник передает этот сигнал результата сравнения упомянутому пользователю, по меньшей мере в случае, где упомянутое сравнение показывает аномалию. Таким образом, в силу настоящего изобретения,каждый навигационный МЕО-спутник находится на однонаправленной связи с упомянутыми передающими маяками и может проверять автономным образом,что существенная информация, которую он передает пользователям,является действительной в каждый момент времени. Если проверка прерывается или если она показывает отклонения, по отношению к этой существенной информации, рассматриваемый навигационный спутник включает в последнюю сообщение,указывающее, что упомянутая информация является либо сомнительной (случаи, в которых цепь проверки прерывается или обнаруженное отклонение является значительным,но приемлемым), либо ложной. Поэтому, пользователи могут незамедлительно либо игнорировать информацию, возникающую из соответствующего навигационного спутника, либо снижать вес,выделенный последней в вычислении местоположения. Упомянутые опорные маяки могут, по меньшей мере частично, быть расположены на Земле, или,предпочтительно, на борту спутников на высоких орбитах (например, порядка 40000 км). В последнем случае, преимущественно, чтобы упомянутые несущие маяки спутники были геосинхронными, с тем, чтобы постоянно оставаться в пределах видимости упомянутого центра управления. В случае, где высокие орбиты не являются геосинхронными,предусмотрено несколько станций, распределенных вокруг Земли и связанных с упомянутым центром управления. В соответствии с настоящим изобретением,МЕО-система спутникового позиционирования,содержащая множество навигационных спутников,которые размещены на средневысотных орбитах и,которые управляются, по меньшей мере, одним наземным центром управления, при этом каждый из упомянутых навигационных спутников содержит атомные часы, приемник-декодер радиосигналов управления, передаваемых упомянутым наземным центром управления, формирователь первой информации о времени и местоположении, который связан с упомянутыми часами и с упомянутым приемником-декодером, и передатчик, передающий упомянутую первую информацию упомянутому пользователю, примечательна тем, что- упомянутая система содержит множество опорных маяков, распределенных в пространстве и управляемых упомянутым наземным центром управления, при этом каждый маяк способен передавать вторую информацию о времени и местоположении, а также радиоэлектрический сигнал и- средство для приема упомянутой второй информации, передаваемой, по меньшей мере,некоторыми из упомянутых опорных маяков, при этом упомянутое средство приема измеряет изменение в доплеровской частоте, возникающее в упомянутых радиоэлектрических сигналах,передаваемых упомянутыми опорными маяками- средство для декодирования упомянутой второй информации,принятой упомянутым средством приема средство вычисления,принимающее упомянутую вторую информацию, декодированную упомянутым средством декодирования, упомянутые изменения в доплеровской частоте и упомянутую первую информацию, переданную упомянутым формирователем, при этом упомянутое средство вычислениявычисляет упомянутое первое, второе, третье и четвертое значения на основе упомянутой первой и второй информации, с одной стороны, и 3 24463 упомянутых изменений в доплеровской частоте, с другой сторонысравнивает, для каждого опорного маяка,упомянутое первое значение расстояния и упомянутое третье значение расстояния, а также упомянутое второе значение скорости изменения расстояния и упомянутое четвертое значение скорости изменения расстояния иадресует результаты сравнений в упомянутый формирователь, так что последний, как только возможно, включает их в упомянутую первую информацию. Логика решения, применяемая средством вычисления, чтобы определять качество и безопасность навигационных данных, может быть следующей- если все состоятельны в предопределенных предписанных пределах, то средство вычисления сигнализирует об этом факте в формирователь навигационного кадра МЕО-спутника, который включает в навигационную информацию,отправляемую пользователям,сообщение,сигнализирующее, что данные позиционирования МЕО-спутника корректны,- если связь с маяками низкого качества (не достаточно доступных маяков или плохой энергетический потенциал линии связи), то данные сомнительны, и средство вычисления сигнализирует об этом факте в формирователь навигационного кадра (первой информации), который включает в навигационную информацию,отправляемую пользователям, сообщение, сигнализирующее, что качество данных позиционирования МЕО-спутника недостоверно, а потому, сомнительно,- в заключение, если доплеровские сигналы,принятые от маяков, и/или расстояние МЕОспутника от этих маяков противоречивы с навигационными данными МЕО-спутника, то компьютер сигнализирует об этом факте в формирователь навигационного кадра (первой информации), который включает в навигационную информацию,отправляемую пользователям,предупредительное сообщение, сигнализирующее,что данные позиционирования МЕО-спутника являются ложными. Упомянутая первая информация, адресованная в упомянутое средство вычисления,может дискретизироваться непосредственно на выходе упомянутого формирователя первой информации. Однако, с тем чтобы гарантировать, что качество сигнала, передаваемого в итоге, является хорошим,кроме того, возможно предусматривать, на каждом навигационном спутнике,вспомогательный приемник-декодер для приема и декодирования упомянутой первой информации, передаваемой упомянутым передатчиком,упомянутый вспомогательный приемник-декодер адресует упомянутую первую информацию в упомянутое средство вычисления. Настоящее изобретение, более того, содержит навигационный спутник, такой как описанный выше. Фиг. прилагаемых чертежей будут разъяснять способ,которым может быть воплощено изобретение. На этих фиг., идентичные ссылки обозначают подобные элементы. Фиг. 1 - схематический и частичный вид системы спутникового позиционирования в соответствии с настоящим изобретением. Фиг. 2 - схема электронного оборудования навигационного спутника в соответствии с настоящим изобретением. Система спутникового позиционирования,схематично и частично изображенная на фиг.1,содержит- навигационные спутники 1, называемые МЕОспутниками, описывающие средневысотные орбиты 2 (МЕО-орбиты) вокруг Земли Т и оборудованные антенными системами 3 и- наземный центр 4 управления, оборудованный системой антенн 5. Известным образом, на борту каждого МЕОспутника 1 находится электронный элемент оборудования 6 (см. фиг.2), способный принимать,через надлежащую часть 3.1 антенной системы 3,радиосигналы управления, передаваемые центром 4 управления, и передавать, через надлежащую часть 3.2 антенной системы 3, сигналы позиционирования пользователям, расположенным на земле Т. Подобным известным образом, упомянутый электронный элемент оборудования 6 содержит приемник-декодер радиосигналов управления 7,связанный с частью 3.1 антенны, атомные часы 8,формирователь навигационных кадров 9,принимающий сигналы от приемника-декодера 7 и часов 8, и радиопередатчик 10, принимающий навигационные кадры (скорректированное время и эфемериды) из формирователя 9 и адресующий их пользователям через часть 3.2 антенны. В соответствии с настоящим изобретением,система спутникового позиционирования по фиг.1,кроме того, содержит опорные маяки 11,оборудованные антеннами 12 для передачи радионесущей с сообщением, содержащим их местоположения (в трехмерных координатах или в виде эфемерид) и временной опорный сигнал,повторяемый с частотой повторения, которая является большей, чем цикл передачи сигналов,передаваемых спутниками 1 на Землю Т. Опорные маяки 11 расположены либо на Земле Т, либо на борту антенны 12 опорных маяков 11 составляют часть антенных систем 16 спутников 14. Сигналы, передаваемые опорными маяками 11,посредством антенн 12,управляются и синхронизируются наземным центром 4 управления. В соответствии с изобретением, сигналы,приходящие от опорных маяков 11, используются спутниками 1 для подтверждения сигналов, которые они сами передают наземным пользователям. Для этой цели,как схематически проиллюстрировано на фиг.2, к электронному элементу оборудования б, установленному на борту каждого спутника 1, присоединен комплементарный элемент оборудования 17, принимающий сигналы от 24463 маяков 11 через надлежащую часть 3.3 антенной системы 3 упомянутого спутника 1. Электронный элемент оборудования 17 содержит приемники 18, принимающие упомянутые сигналы от маяков 11 посредством упомянутой части 3.3 антенны. Приемники 18 измеряют доплеровские сигналы радиочастот, передаваемых различными опорными маяками 11, и адресуют эти доплеровские сигналы в компьютер 19 состоятельности через линию 20 связи. Более того, приемники 18 адресуют данные, принятые с опорных маяков 11, в декодер 21. Упомянутый декодер 21 извлекает информацию о местоположении и времени, принятую с упомянутых опорных маяков 11, и адресует ее в упомянутый компьютер 19 состоятельности. Дополнительно, по линии 22 связи, компьютер состоятельности принимает навигационные кадры,сформированные формирователем 9 электронного элемента оборудования 6. Таким образом/ компьютер 19 состоятельности- вычисляет, для спутника 1, который его несет,расстояния от различных опорных маяков 11, а также скорость изменения этих расстояний,учитывая, с одной стороны, декодированную информацию о местоположении и времени последних, доставленную декодером 21, и, с другой стороны, скорректированные бортовое время и эфемериды,возникающие из упомянутого формирователя навигационных кадров 9- проверяет, что эти вычисленные расстояния и скорости изменения расстояний непротиворечивы с доплеровскими сигналами,измеренными приемниками 18 и передает результат этой проверки состоятельности в формирователь навигационных кадров 9 через линию 23 связи. На фиг.2, кроме того, изображен приемникдекодер навигационных кадров 24, снабженный приемной антенной 3.4, формирующей часть антенной системы 3. Приемник-декодер 24 способен принимать навигационные кадры, передаваемые радиопередатчиком 10, посредством его антенны 3.2, и отправлять их в компьютер 19 состоятельности. Приемник-декодер 24,следовательно, способен замещать и/или дополнять линию 22 связи. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ позиционирования пользователя на Земле (Т), упомянутый способ внедряет множество навигационных спутников (1), которые размещены на средневысотных орбитах (2) и которые управляются, по меньшей мере, одним наземным центром (4) управления, каждый из упомянутых навигационных спутников (1) передает первую информацию о времени и местоположении, которые индивидуальны для него, отличающийся тем, что- множество опорных маяков (11), управляемых упомянутым наземным центром (4) управления, и при этом каждый способен передавать специальную вторую информацию о времени и местоположении, а также специальный радиоэлектрический сигнал,распределены в космическом пространстве и на борту каждого навигационного спутника (1) детектируют упомянутую передаваемую вторую информацию о времени и местоположении, по меньшей мере, некоторыми из упомянутых опорных маяков (11) вычисляют первые значения и вторые значения,соответственно представляющие расстояния между упомянутым навигационным спутником (1) и каждым из упомянутых маяков (11), и скорость изменения этих расстояний, на основе упомянутой первой и второй информации о времени и местоположении измеряют изменение в доплеровской частоте,появляющееся в упомянутых передаваемых радиоэлектрических сигналах,упомянутыми опорными маяками (11) вычисляют третьи значения и четвертые значения,соответственно представляющие расстояния между упомянутым навигационным спутником (1) и каждым из упомянутых маяков (11),и скорость изменения этих расстояний, на основе упомянутых изменений в доплеровской частоте для каждого опорного маяка (11), сравнивают упомянутое первое значение расстояния и упомянутое третье значение расстояния, а также упомянутое второе значение скорости изменения расстояния и упомянутое четвертое значение скорости изменения расстояния формируют сигнал, представляющий результаты упомянутых сравнений и упомянутый навигационный спутник (1) передает этот сигнал результата сравнения упомянутому пользователю,по меньшей мере в случае, где упомянутое сравнение показывает аномалию. 2. Способ по п.1, отличающийся тем, что, по меньшей мере, некоторые опорные маяки (11) расположены на Земле (Т). 3. Способ по п.1, отличающийся тем, что, по меньшей мере, некоторые опорные маяки (11) расположены на борту спутников (14) на высоких орбитах (15). 4. Способ по п.3, отличающийся тем, что спутники (14) на высоких орбитах (15) являются геосинхронными. 5. Система для реализации способа позиционирования пользователя на Земле (Т) по любому из п.п.1-4, содержащая множество навигационных спутников (1), которые размещены на средневысотных орбитах (2) и которые управляются, по меньшей мере, одним наземным центром (4) управления, при этом каждый из упомянутых навигационных спутников (1) содержит атомные часы(7) радиосигналов управления,передаваемых упомянутым наземным центром (4) управления,формирователь (9) первой информации о времени и местоположении, который связан с упомянутыми часами (8) и с упомянутым приемником-декодером(7), и передатчик (10), передающий упомянутую первую информацию упомянутому пользователю,отличающаяся тем, что 5 24463 упомянутая система содержит множество опорных маяков(11),распределенных в пространстве и управляемых упомянутым наземным центром (4) управления, при этом каждый маяк (11) способен передавать вторую информацию о времени и местоположении,а также радиоэлектрический сигнал и каждый навигационный спутник(1),дополнительно содержит средство (18) для приема упомянутой второй информации, передаваемой по меньшей мере некоторыми из упомянутых опорных маяков (11),при этом упомянутое средство (18) приема измеряет изменение в доплеровской частоте, возникающее в упомянутых радиоэлектрических сигналах,передаваемых упомянутыми опорными маяками(11) средство (21) для декодирования упомянутой второй информации,принятой упомянутым средством (18) приема средство (19) вычисления, принимающее упомянутую вторую информацию, декодированную упомянутым средством(9) первой информации, упомянутое средство (19) вычисления вычисляет упомянутое первое, второе, третье и четвертое значения на основе упомянутой первой и второй информации, с одной стороны, и упомянутых изменений в доплеровской частоте, с другой стороны сравнивает, для каждого опорного маяка (11),упомянутое первое значение расстояния и упомянутое третье значение расстояния, а также упомянутое второе значение скорости изменения расстояния и упомянутое четвертое значение скорости изменения расстояния и адресует результаты сравнений в упомянутый формирователь, так что последний, как только возможно, включает их в упомянутую первую информацию. 6. Система по п.5, отличающаяся тем, что упомянутая первая информация, адресованная в упомянутое средство(19) вычисления,дискретизируется на выходе упомянутого формирователя (9) первой информации. 7. Система по п.5, отличающаяся тем, что каждый навигационный спутник (1) дополнительно содержит вспомогательный приемник-декодер (24) для приема и декодирования упомянутой первой информации,передаваемой упомянутым передатчиком (10), при этом упомянутый вспомогательный приемник-декодер (24) адресует упомянутую первую информацию в упомянутое средство (19) вычисления. 8. Навигационный спутник для системы позиционирования по п.5,упомянутый навигационный спутник (1) содержит атомные часы(7) радиосигналов управления, передаваемых наземным центром (4) управления, формирователь (9) первой информации о времени и местоположении, который связан с упомянутыми часами (8) и с упомянутым приемником-декодером (7), и передатчик (10),передающий упомянутую первую информацию упомянутому пользователю, отличающийся тем,что при этом упомянутая навигационная система содержит множество опорных маяков (11),распределенных в пространстве и управляемых упомянутым наземным центром (4) управления,причем каждый маяк (11) способен передавать вторую информацию о времени и местоположении,а также радиоэлектрический сигнал, и тем, что он дополнительно содержит- средство (18) для приема упомянутой второй информации, передаваемой по меньшей мере некоторыми из упомянутых опорных маяков (11),при этом упомянутое средство(18) приема измеряет изменение в доплеровской частоте,возникающее в упомянутых радиоэлектрических сигналах,передаваемых упомянутыми опорными маяками (11)- средство (21) для декодирования упомянутой второй информации,принятой упомянутым средством (18) приема- средство (19) вычисления, принимающее упомянутую вторую информацию, декодированную упомянутым средством(9) первой информации, при этом упомянутое средство (19) вычисления вычисляет упомянутое первое, второе, третье и четвертое значения на основе упомянутой первой и второй информации, с одной стороны, и упомянутых изменений в доплеровской частоте, с другой стороны сравнивает, для каждого опорного маяка (11),упомянутое первое значение расстояния и упомянутое третье значение расстояния, а также упомянутое второе значение скорости изменения расстояния и упомянутое четвертое значение скорости изменения расстояния и адресует результаты сравнений в упомянутый формирователь, так что последний, как только возможно, включает их в упомянутую первую информацию. 9. Спутник по п.8, отличающийся тем, что упомянутая первая информация, адресованная в упомянутое средство(19) вычисления,дискретизируется на выходе упомянутого формирователя (9) первой информации. 10. Спутник по п.8, отличающийся тем, что дополнительно содержит вспомогательный приемник-декодер (24) для приема и декодирования упомянутой первой информации, передаваемой упомянутым передатчиком (10), при этом упомянутый вспомогательный приемник-декодер(24) отправляет упомянутую первую информацию в упомянутое средство (19) вычисления.
МПК / Метки
МПК: G01S 5/04, H04B 7/185, G01S 5/14, B64G 1/10
Метки: способ, спутникового, позиционирования, система
Код ссылки
<a href="https://kz.patents.su/8-24463-sposob-i-sistema-sputnikovogo-pozicionirovaniya.html" rel="bookmark" title="База патентов Казахстана">Способ и система спутникового позиционирования</a>
Платежный терминал для обмена данными о платежах, устройство пункта продажи, платежная система, содержащая платежный терминал и способ осуществления платежа с помощью платежной системы
Номер патента: 18660
Опубликовано: 16.08.2010
Авторы: ПАВЛИЧ, Богдан, ПОЛУТНИК, Александр, ТЕРПИН, Матьяз
МПК: G06Q 30/00
Метки: устройство, система, содержащая, терминал, платежный, платежной, пункта, продажи, помощью, системы, платежа, платежная, осуществления, платежах, способ, данными, обмена
Формула / Реферат:
Изобретение относится к системе для обмена данными о финансовых транзакциях между устройством пункта продажи, например, торговым автоматом и пр., и центром платежей или санкционирующим центром и к устройству пункта продажи, используемому в платежной системе.Платежный терминал (10) для обмена данными оплаты, содержащий интерфейсы для соединения с устройствами (26) пункта продажи, с мобильным телефоном (14) и с платёжным центром (1). Обмен данными...
Устройство для ввода зонда в металлургический агрегат и вывода из него и способ позиционирования зонда
Номер патента: 3586
Опубликовано: 10.06.1996
Авторы: Норберт Рамазедер, Хуберт Еллингер
МПК: C21C 5/30
Метки: металлургический, него, позиционирования, вывода, агрегат, устройство, способ, зонда, ввода
Формула / Реферат:
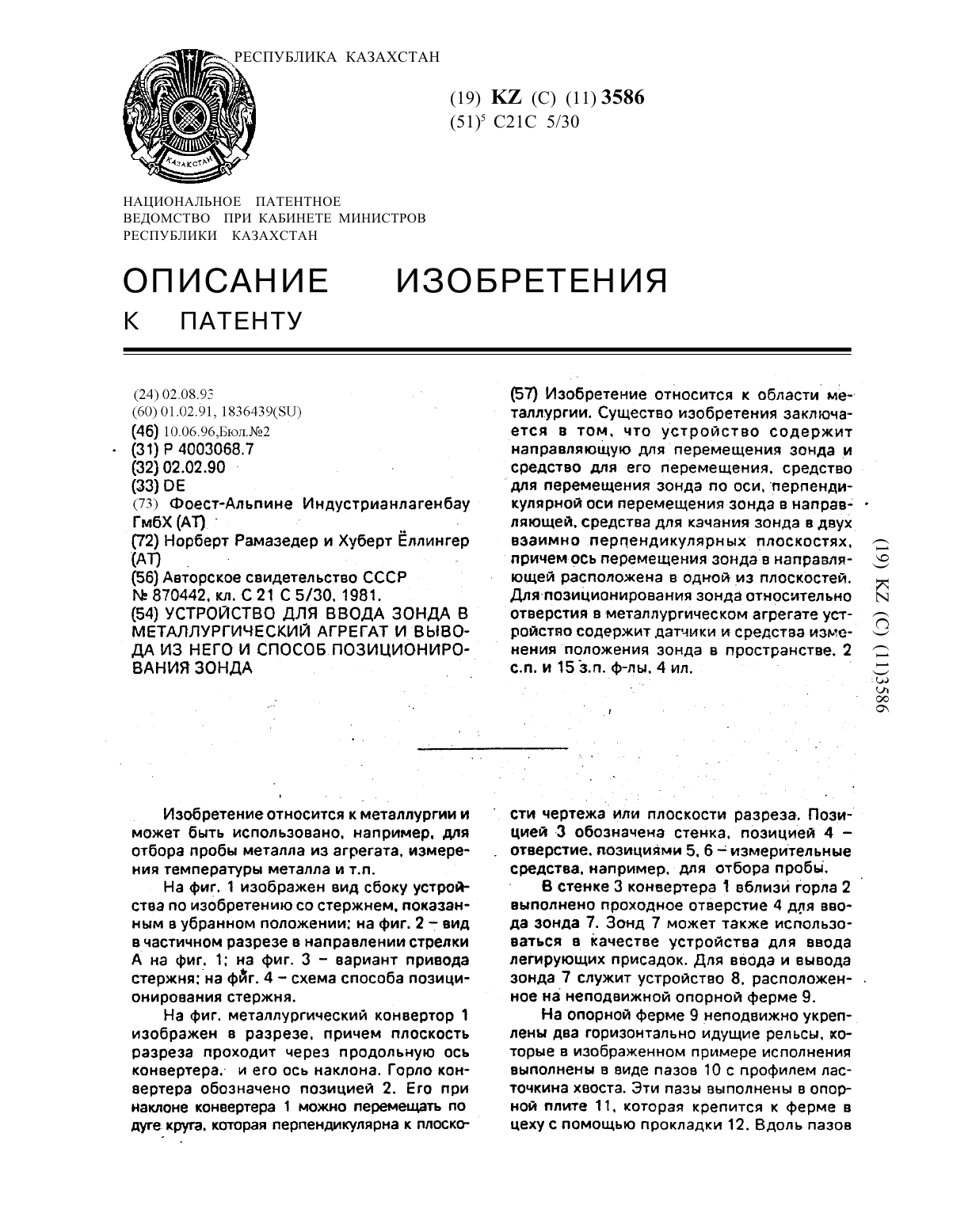
Изобретение относится к области металлургии. Существо изобретения заключается в том, что устройство содержит направляющую для перемещения зонда и средство для его перемещения, средство для перемещения зонда по оси, перпендикулярной оси перемещения зонда в направляющей, средства для качания зонда в двух взаимно перпендикулярных плоскостях, причем ось перемещения зонда в направляющей расположена в одной из плоскостей. Для позиционирования зонда...
Система контроля и регистрации полётной информации
Номер предварительного патента: 20638
Опубликовано: 15.01.2009
Авторы: Скубилин Михаил Демьянович, Бублей Сергей Евгеньевич, Письменов Александр Владимирович
МПК: G05D 23/02, A61B 5/0404, A61B 5/022...
Метки: регистрации, полётной, система, информации, контроля
Формула / Реферат:
Изобретение относится к авиационной технике и может быть использовано для контроля и диагностики состояния летательного аппарата и человека-оператора в целях предупреждения нештатных ситуаций в процессе полёта.Система контроля и регистрации полётной информации, содержит подсистему сбора и передачи полетной информации, размещенную на борту летательного аппарата, и подсистему приема и обработки полетной информации, размещенную в наземном пункте...
Спутниковая система связи
Номер патента: 1317
Опубликовано: 15.09.1994
Автор: Петер Дондль
МПК: H04B 7/185
Метки: спутниковая, система, связи
Формула / Реферат:
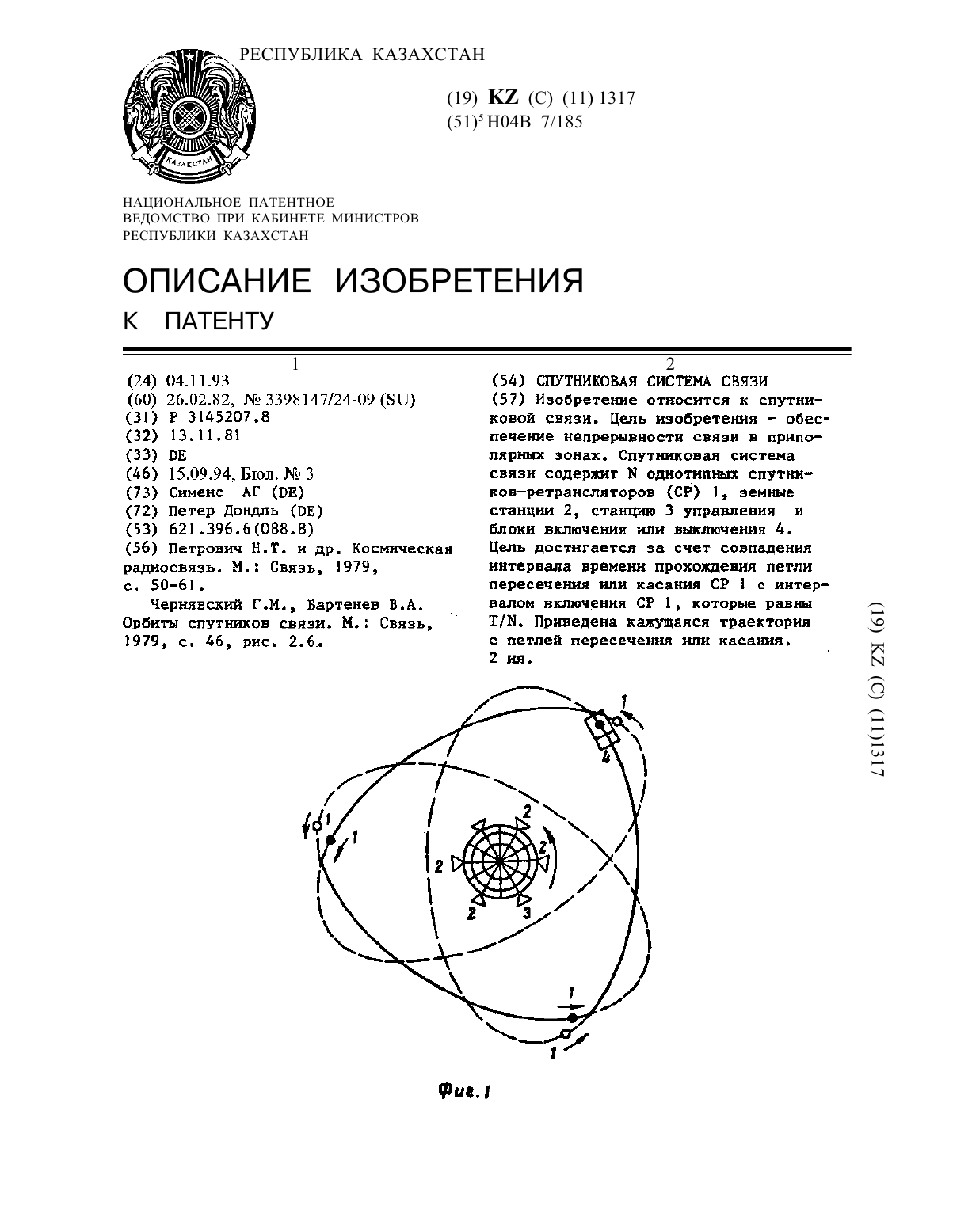
Изобретение относится к спутниковой связи. Цель изобретения - обеспечение непрерывности связи в приполярных зонах. Спутниковая система связи содержит N однотипных спутников-ретрансляторов (СР) 1, земные станции 2, станцию 3 управления и блоки включения или выключения 4. Цель достигается за счет совпадения интервала времени прохождения петли пересечения или касания СР 1 с интервалом включения СР 1, которые равны Т/N. Приведена кажущаяся...
Автоматизированная система управления процессом термообработки железобетонных изделий
Номер предварительного патента: 6724
Опубликовано: 16.11.1998
Авторы: Голинка Александр Иванович, Беккерман Светлана Юрьевна, Филимонова Галина Васильевна
МПК: G05D 23/19
Метки: автоматизированная, управления, железобетонных, процессом, система, термообработки, изделий
Формула / Реферат:
Изобретение относится к автоматизированным системам управления технологическими процессами и может быть использовано при термовлажностной обработке железобетонных изделий.Технический результат - упрощение обработки данных большего количества датчиков, обеспечение сохранения и использования информации, полученной с датчиков, при отключениях сетевого питания и выдача информации в цифровом виде.Это достигается тем, что в автоматизированную систему...
Предыдущий патент: Способ обнаружения антигенов Mycobacterium bovis в патологическом и биологическом материале
Следующий патент: Способ информационного обеспечения пассажиров общественного транспорта
Случайный патент: Способ лечения рефрактерных форм множественной миеломы