Способ и система для управления локомотивом и блокировочная система для использования с транспортным средством
Номер патента: 26690
Опубликовано: 15.02.2013
Авторы: ХАМФРИ, Стефен, Харольд, КЛАРК, Шон, Томас, БЕЙКЕР, Джеффри, Кит, ОЦУБО, Том, ХЭЙДЖЕН, Вилльям, Эдвард, ФРЭЙКС, Брентон, Айло, БЕШОНЕР, Джером, Стефен, СТАЛЛ, Крейг, Алан
Формула / Реферат
Представлен способ для управления локомотивом. Способ включает подсоединение процессора на локомотиве для контроля, по меньшей мере, одного из рабочего параметра и работы оборудования. Способ также включает определение статуса теста на отклонение для локомотива с использованием процессора и управление блокировкой, основываясь на статусе теста на отклонение, причем блокировка сконфигурирована для того, чтобы регулировать рабочую скорость локомотива.
Текст
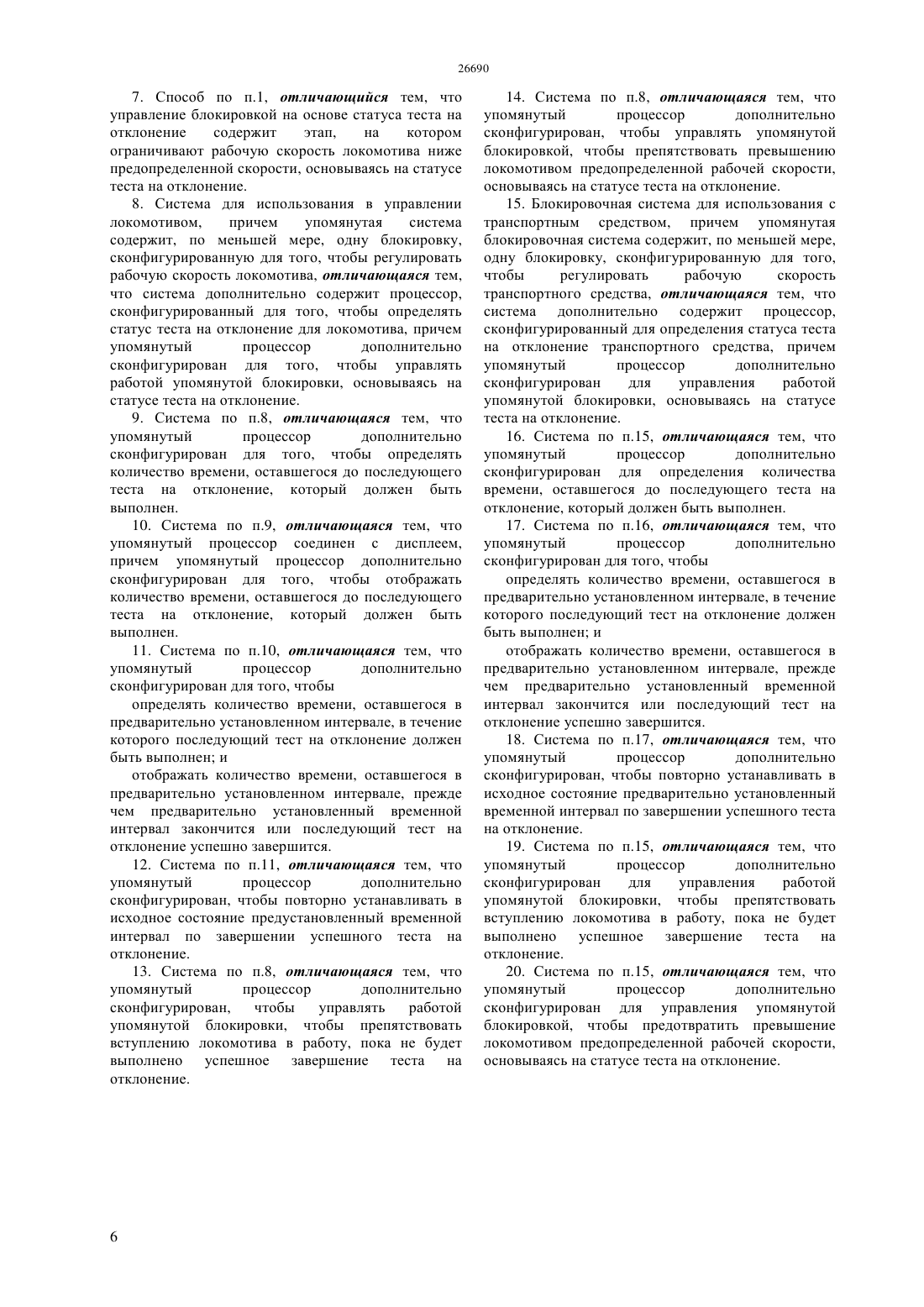
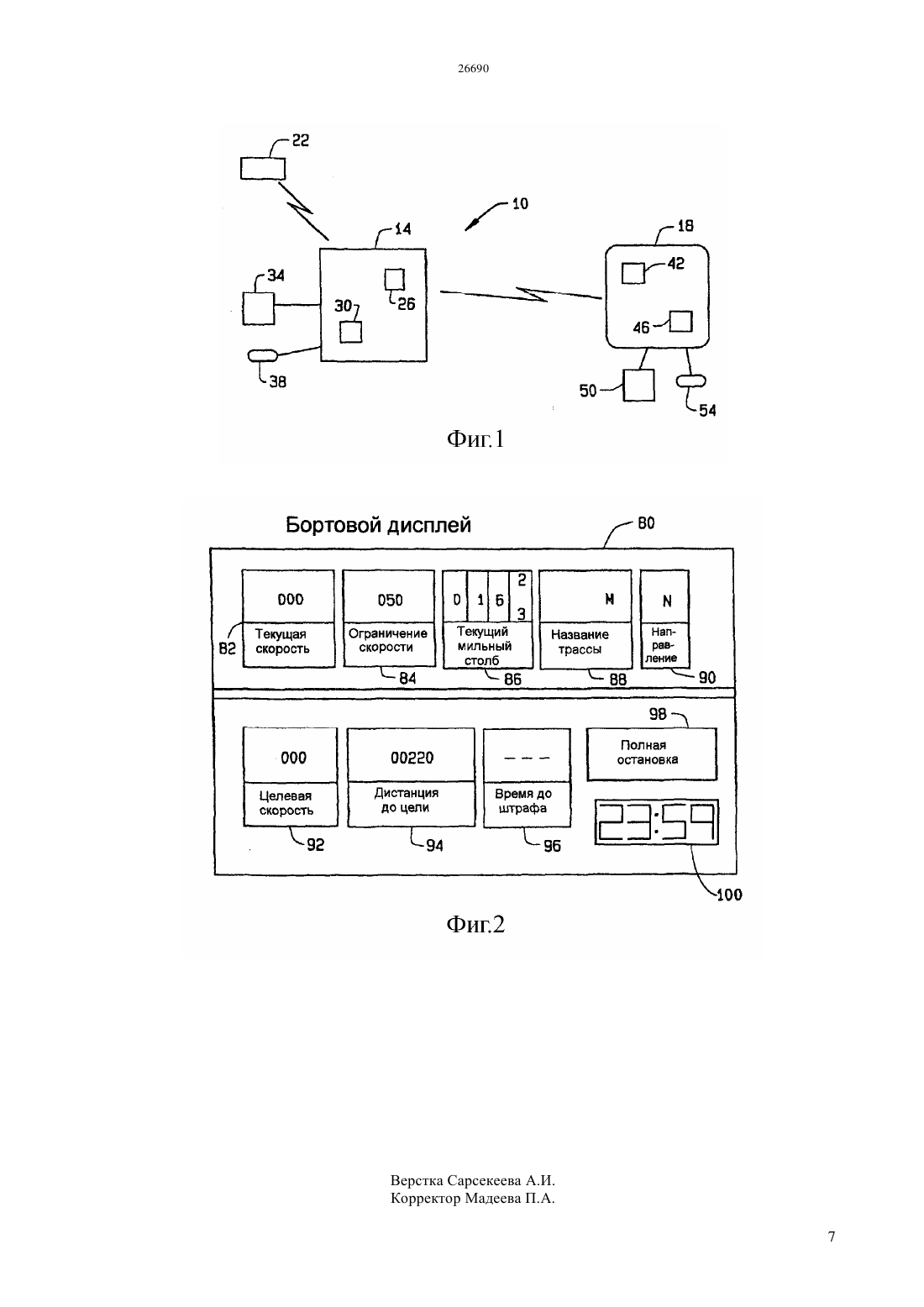
(51) 61 25/04 (2006.01) 61 27/04 (2006.01) КОМИТЕТ ПО ПРАВАМ ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ МИНИСТЕРСТВА ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ПАТЕНТУ образованию на железнодорожном транспорте,2006,. 237-2442262459 2, кл. 61 25/04, 20056799097 2, кл. 06 19/00, 2004(54) СПОСОБ И СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ЛОКОМОТИВОМ И БЛОКИРОВОЧНАЯ СИСТЕМА ДЛЯ ИСПОЛЬЗОВАНИЯ С ТРАНСПОРТНЫМ СРЕДСТВОМ(57) Представлен способ для управления локомотивом. Способ включает подсоединение процессора на локомотиве для контроля, по меньшей мере, одного из рабочего параметра и работы оборудования. Способ также включает определение статуса теста на отклонение для локомотива с использованием процессора и управление блокировкой, основываясь на статусе теста на отклонение,причем блокировка сконфигурирована для того, чтобы регулировать рабочую скорость локомотива.(56)2248899 1, кл. 61 25/04, 2005 Венцевич Л.Е. Локомотивные устройства обеспечения безопасности движения поездов и расшифровка информационных данных их работы. М. ГОУ Учебно-методический центр по Настоящая заявка испрашивает приоритет предварительной заявки 60/889436,зарегистрированной 12 февраля 2007, которая включена в настоящий документ в полном объеме посредством ссылки. Уровень техники изобретения Настоящее изобретение в целом относится к локомотивам и, более детально, к способу и системе для управления локомотивом. Локомотивы управляются во множестве географических местоположений множеством операторов. Чтобы гарантировать, что локомотивы и системы управления, использующиеся на этих локомотивах, управляются корректно и безопасно, и что такие системы включают последние обновления контроллеров, по меньшей мере, один тест на отклонение выполняется оператором локомотива. Тест на отклонение удостоверяет и подтверждает,что локомотив имеет корректные параметры управления и что оборудование работоспособно. По меньшей мере, несколько директив требуют,чтобы тест на отклонение выполнялся на каждом локомотиве в течение предопределенного рабочего интервала. Например, некоторые директивы требуют, чтобы тест на отклонение выполнялся, по меньшей мере, один раз в каждые двадцать четыре часа. Обычно, оператор локомотива ответственен за гарантирование того, что тест на отклонение был выполнен в течение этого рабочего интервала. Например, оператор может вводить время и дату последнего теста на отклонение в бортовой журнал и затем периодически обращаться к бортовому журналу для определения, когда требуется следующий тест на отклонение. В каждой ситуации, конечная ответственность за выполнение теста на отклонение в течение рабочего временного интервала входит в обязанности оператора локомотива. Известные локомотивы не включают в себя систем, которые способны определить, что тест на отклонение был выполнен или, когда следующий тест на отклонение запланирован к выполнению. В результате,некоторые локомотивы могут вводиться в обслуживание без выполнения теста на отклонение или подтверждения, что тест на отклонение был выполнен. Публикация заявки на патент США 2005/0065677 ( и др.) раскрывает систему автоматического определения характеристик экстренного торможения транспортного средства. Система содержит средство для измерения скорости транспортного средства, средство для измерения расстояния, пройденного транспортным средством,и средство для начала экстренного торможения транспортного средства. Система согласно заявке на патент США 2005/0065677 содержит средство для обнаружения активации экстренного торможения транспортного средства, средство для обнаружения остановки транспортного средства, средство для получения информации о скорости движения и расстоянии, пройденного транспортным средством в течение периода времени от срабатывания средства активации экстренного до остановки транспортного 2 средства, и средство для анализа полученной информации для обеспечения, по меньшей мере,расстояния, пройденного транспортным средством после активации средства торможения. Таким образом, в заявке на патент США 2005/0065677 предоставлено средство для автоматического определения расстояния для остановки поезда после активации средства экстренного торможения поезда. Публикация заявки на патент США 2006/0058957 ( и др) раскрывает систему управления движением поезда с использованием,который активирует тормозную систему, если определяют, что поезд пошел по ложному пути после переключения. Один из вариантов осуществления активирует сигнал тревоги, чтобы дать оператору возможность принять меры, такие как, подтверждение тревоги и/или активировация тормоза, чтобы остановить или замедлить поезд в течение некоторого заранее установленного периода времени. Сущность изобретения С одной стороны,представлен способ управления локомотивом. Способ включает в себя подключение процессора на локомотиве для контроля, по меньшей мере, одного из рабочего параметра и работы оборудования. Способ также включает в себя определение статуса теста на отклонение для локомотива с использованием процессора и управление блокировкой, основываясь на статусе теста на отклонение, причем блокировка сконфигурирована так, чтобы регулировать рабочую скорость локомотива. С другой стороны, представлена система для использования в управлении локомотивом. Система включает в себя, по меньшей мере, одну блокировку,сконфигурированную для регулирования рабочей скорости локомотива, и процессор,сконфигурированный так,чтобы определять статус теста на отклонение локомотива,при этом процессор дополнительно сконфигурирован так, чтобы управлять работой блокировки, основываясь на статусе теста на отклонение. С другой стороны, представлена система блокировки для использования с транспортным средством. Система блокировки включает в себя, по меньшей мере,одну блокировку,сконфигурированную для того, чтобы регулировать рабочую скорость транспортного средства, и процессор,сконфигурированный так,чтобы определять статус теста на отклонение для транспортного средства,причем процессор дополнительно сконфигурирован для того, чтобы управлять работой блокировки, основываясь на статусе теста на отклонение. Краткое описание чертежей Фиг.1 - блок-схема примерной системы управления, которая может использоваться с локомотивом и Фиг.2 - примерное отображение на бортовом дисплее, которое может генерироваться с использованием системы, показанной на фиг.1. Подробное описание Фиг.1 - блок схема примерной системы 10 для использования в управлении локомотивом. В примерном варианте выполнения, система 10 включает бортовой компьютер (ОВС) 14, сервер 18,который может быть расположен на стационарном удаленном узле, и бортовую следящую систему 22 для использования в отслеживании местоположения транспортного средства. ОВС 14 включает в себя процессор 26, который выполняет существенные и не существенные вычисления, а также существенное кодирование и декодирование информации, и устройство 30 хранения данных, такое как база данных. Дополнительно, в примерном варианте выполнения, ОВС 14 соединен с ОВС дисплеем 34,для визуализации информации,данных и возможных графических представлений и пользовательский интерфейс 38 ОВС, который позволяет пользователю вводить информацию,данные и/или вопросы в ОВС 14, используя,например, клавиатуру или мышь. В примерном варианте выполнения сервер 18 включает процессор 42, который выполняет существенные и/или несущественные вычисления, а также кодирует и декодирует информацию, и устройство 46 хранения данных, которое, в одном варианте выполнения включает в себя базу данных. Как применено здесь,термин процессор не ограничен только интегральными схемами, упоминаемыми в данной области техники как процессор, но в широком смысле относится к компьютеру,микроконтроллеру, микрокомпьютеру, контроллеру с программируемой логикой,прикладной интегральной схеме и любой другой программируемой схеме. Более того, в примерном варианте выполнения сервер 18 связан с серверным дисплеем 50 для визуализации информации,данных, графических представлений и связан с пользовательским интерфейсом 54 сервера, который позволяет пользователю вводить информацию,данные и/или вопросы в сервер 18, используя,например, клавиатуру или мышь. В примерном варианте выполнения и ОВС 14, и сервер 18 взаимодействуют с различными контрольными элементами (не показано), такими как сенсоры,исполнительные механизмы,сигнализации, придорожные устройства, такие как направляющие переключатели, для выбора из двух или более расходящихся путей, сигналы и схемы обнаружения занятости. Дополнительно в примерном варианте выполнения, ОВС 14 обменивается информацией с сервером 18 через коммуникационную систему, такую как мобильную радиосеть. Следящая система 22 включает в себя сенсоры местоположения (не показано) и устройства(не показано), такие как приемник глобальной системы позиционирования , тахометр,гироскоп, одометр, метки местоположения вдоль направляющего пути, бортовой считыватель меток. В примерном варианте выполнения следящая система 22 отделена от ОВС 14 и принимает входные сигналы, по меньшей мере, с одногоспутника (не показано). В качестве альтернативы,следящая система 22 может принимать и использовать информацию дифференциальной корректировки для улучшения точности и/или достоверности определения местоположения. На фиг.1 примерная бортовая следящая система 22 отделена (т.е. расположена удаленно) от ОВС 14. В другом варианте выполнения ОВС 14 включает в себя следящую систему 22. В качестве альтернативы, следящая система 22 имеет компоненты, которые отделены от ОВС 14, и компоненты, которые включены в ОВС 14. Например, в одном варианте выполнения компоненты следящей системы 22, такие как система глобального позиционирования, приемник и/или алгоритмы программного обеспечения, могут быть включены в ОВС 14, в то время как другие компоненты следящей системы 22, такие как,тахометр, гироскоп, одометр и/или считыватель направляющих меток, могут быть отделены от ОВС 14. В примерном варианте выполнения сервер 18 расположен на подвижном узле, таком как мобильная офисная конструкция или локомотив. В альтернативном варианте выполнения устройство 30 хранения данных не включено в ОВС 14, но скорее устройство 30 хранения данных соединено с ОВС 14. В другом варианте выполнения устройство 46 хранения данных может не быть включено в сервер 18, но скорее соединено с сервером 18. Фиг.2 - примерный вариант выполнения графического представления 80, которое может быть показано на ОВС дисплее 34, такого как информация, относящаяся к контролированию или ограничению движения транспортного средства. В примерном варианте выполнения, графическое представление 80 включает индикатор 82 текущей скорости, индикатор 84 ограничения скорости,индикатор 86 текущего мильного столба, индикатор 88 названия трассы, индикатор 90 направления,индикатор 92 целевой скорости, индикатор 94 дистанции до цели, индикатор 96 времени до штрафа и индикатор 98 полной остановки, каждый из которых используется, чтобы передавать элементы управления и ограничения движения транспортного средства. Основываясь на составных эквивалентных блочных сообщениях статуса,получаемых ОВС 14, оборудование на борту каждого транспортного средства, такое как ОВС дисплей 34, отображает информацию или ограничители, необходимые для безопасного управления транспортным средством. Как показано в графическом представлении 80, в примерном варианте выполнения, информация, необходимая для безопасного управления транспортным средством, включает информацию, подходящую к этому транспортному средству, описание цели,ограничения на диапазон перемещения,позволенные для транспортного средства,скоростные ограничения, которые могут храниться на борту. В другом варианте выполнения, дисплей отображает аспекты сигналов, такие как красный,желтый, зеленый свет, а не ограничивающие условия основанного на цели движения. В дополнение, в примерном варианте выполнения,3 система 10 включает модуль звукового аварийного сигнала (не показан), которой обеспечивают предупреждения приближающихся целей,ограничений, аспект сигнала переходит в более ограничивающее состояние или действие торможения, которое было выполнено. Как описано выше, по меньшей мере, некоторые директивы требуют, чтобы тест на отклонение был выполнен на каждом локомотиве в течение предустановленного временного интервала. Как используется здесь,тест на отклонение определяется как удостоверение и подтверждение того, что или специфические для локомотива параметры управления правильны и/или часть оборудования локомотива работоспособна. Поэтому успешный тест на отклонение был выполнен через такое удостоверение или подтверждение. В то время как тест на отклонение определен здесь, как подходящий для использования с локомотивом, тест на отклонение не следует ограничивать использованием с локомотивом. В альтернативных вариантах выполнения, тест на отклонение,определенный выше, может быть использован с любым транспортным средством. Как упомянуто выше, тест на отклонение, в общем,выполняется в предустановленный временной интервал. Например,тесты на отклонение могут быть выполнены каждые двадцать четыре часа. Однако, несмотря на то, что двадцать четыре часа - допустимый временной интервал между тестами на отклонение, следует понимать,что ограничение времениявляется только примерным и, что любой предустановленный временной интервал может быть использован, чтобы выполнить способ и систему, описанные здесь. Для помощи оператору в определении того, как много времени осталось в предустановленном временном интервале для завершения успешного теста на отклонение, в примерном варианте выполнения компьютерная система 10 также включает индикатор 100 теста на отклонение, такой как часы, которые сконфигурированы для того,чтобы отображать количество времени, оставшегося в предварительно установленном временном интервале. В примерном варианте выполнения индикатор 100 теста на отклонение определяет и отображает время, оставшееся в предварительно установленном временном интервале до окончания предварительно установленного временного интервала и/или успешного завершения теста на отклонение. В примерном варианте выполнения ОВС 14 сконфигурирован для того, чтобы многократно устанавливать в исходное состояние индикатор 100 теста на отклонение и возобновлять предварительно установленный временной интервал по завершению каждого успешного теста на отклонение, таким образом, начинается новый обратный отсчет в предварительно установленном временном интервале или до окончания предварительно установленного временного интервала и/или успешного завершения другого теста на отклонение. По желанию, предварительно установленный временной интервал может быть 4 сконфигурирован на заводе или может быть сконфигурирован оператором на борту локомотива,используя компьютерную систему 10. Как используется здесь,блокировка определяется как физическая конструкция, такая как устройство, регулируемое дросселем, которое используется для управления рабочей скоростью локомотива. В примерном варианте выполнения ОВС 14 сконфигурирован так, чтобы определять статус теста на отклонение и управлять работой блокировки, основываясь на этом статусе. Например, если ОВС 14 определит, что тест на отклонение не был успешно завершен в течение предустановленного интервала, ОВС 14 активирует блокировку. Кроме того, например, если ОВС 14 определит, что завершенный тест на отклонение был неуспешным,ОВС активирует блокировку. Блокировка может быть запрограммирована в программном обеспечении и храниться, например,на ОВС 14. В примерном варианте выполнения, если локомотив в работе, когда предварительно установленный временной интервал для завершения успешного теста на отклонение завершается,блокировка активируется ОВС 14,чтобы препятствовать превышению локомотивом предопределенной рабочей скорости до момента,когда завершится успешный тест на отклонение,таким образом позволяя локомотиву достичь предназначенной зоны обслуживания для того,чтобы провести тест на отклонение и/или, как только работа локомотива прекращена, препятствуя локомотиву повторно вступить в работу, пока успешный тест на отклонение не будет завершен. Дополнительно, если локомотив не работает, когда предварительно установленный временной интервал для завершения успешного теста на отклонение закончился, блокировка активируется посредством ОВС 14, чтобы препятствовать локомотиву вступать в работу, пока успешный тест на отклонение не будет завершен. В качестве альтернативы, если локомотив не работает, когда предварительно установленный временной интервал для завершения успешного теста на отклонение истекает,блокировка активируется посредством ОВС 14,чтобы препятствовать превышению локомотивом предопределенной рабочей скорости до тех пор,пока успешный тест на отклонение не будет завершен, таким образом позволяя локомотиву достичь предназначенной зоны обслуживания для того, чтобы проводить тест на отклонение и/или, как только работа локомотива прекращена, чтобы препятствовать локомотиву повторно вступить в работу, пока успешный тест на отклонение не будет завершен. В примерном варианте выполнения предопределенная рабочая скорость устанавливается на заводе. В качестве альтернативы, предопределенная рабочая скорость может быть установлена оператором локомотива. Как будет понятно специалисту в данной области техники и основываясь на предшествующем описании, вышеописанные варианты выполнения изобретения могут быть выполнены, используя компьютерное программирование или инженерные технологии,включающие компьютерное программное обеспечение, встроенное программное обеспечение, аппаратное обеспечение или любую комбинацию или поднабор, в котором технический эффект состоит в обеспечении того, что тест на отклонение локомотива выполнен в течение предварительно установленного временного интервала. Любые результирующие программы,имеющие средства читаемого компьютерами кода,могут быть воплощены или предоставлены на одном или более считываемых компьютером носителях,таким образом создавая компьютерный программный продукт,то есть,изделие,соответствующее описанным вариантам выполнения изобретения. Считываемый компьютером носитель может быть, например, без ограничения, стационарным (жестким) диском,дискетой, оптическим диском, магнитной кассетой,полупроводниковой памятью, такой как память только для чтения , и/или любой передающей/принимающей средой, такой как интернет или другая коммуникационная сеть или линия связи. Изделие, содержащее компьютерный код, может быть изготовлено и/или использовано путем исполнения кода непосредственно с носителя,путем копирования кода с одного носителя на другой носитель или путем передачи кода через сеть. Способ и система,описанные здесь,способствуют гарантированию того, что локомотив не сможет продолжать работу, если предварительно установленный временной предел между тестами на отклонение закончился,и способствует гарантированию того, что локомотив безопасно останется в работе, если локомотив в текущий момент работает,когда предустановленный временной предел истекает. По существу, способ и система, описанные здесь, повышают безопасность,способствуя установке наиболее недавних параметров работы локомотива и способствуя периодическому тестированию оборудования локомотива. Описанные здесь способ и система могут быть осуществлены,например,в инкрементной локомотивной системе управления. Однако хотя способ и система, описанные здесь, могут быть осуществлены всистеме,следует понимать, что отдельная система, такая как бортовое устройство, например, может быть использована для выполнения способа и системы,описанных здесь. Примерные варианты выполнения способов и систем для управления локомотивом описаны выше в деталях. Способы и системы для управления локомотивом не ограничиваются конкретными вариантами выполнения, описанными здесь, но скорее, компоненты способов и систем могут быть использованы независимо и отдельно от других компонентов, описанных здесь. Например, способы и системы, описанные здесь, могут иметь другие промышленные или пользовательские применения и не быть ограниченными осуществлением на практике только с локомотивами, как описано здесь. Скорее, настоящее изобретение может быть осуществлено и использовано в связи с многими другими отраслями. Хотя изобретение было описано на основе различных конкретных вариантов выполнения,специалистам в данной области техники должно быть понятно, что изобретение может быть осуществлено на практике с модификацией в пределах сущности и объема пунктов формулы изобретения. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ управления локомотивом, причем упомянутый способ содержит этапы, на которых контролируют, по меньшей мере, одно из рабочего параметра и работы оборудования подсоединенным процессором на локомотиве, отличающийся тем,что способ дополнительно содержит этапы, на которых определяют статус теста на отклонение для локомотива, используя процессор и управляют блокировкой, основываясь на статусе теста на отклонение,причем блокировка сконфигурирована для регулирования рабочей скорости локомотива. 2. Способ по п.1, отличающийся тем, что дополнительно содержит этап, на котором определяют с использованием процессора количество времени, оставшегося до последующего теста на отклонение, который должен быть выполнен. 3. Способ по п.2, отличающийся тем, что определение с использованием процессора количества времени, оставшегося до последующего теста на отклонение, который должен быть выполнен, содержит этап, на котором отображают графическое представление количества времени,оставшегося до последующего теста на отклонение,который должен быть выполнен. 4. Способ по п.3, отличающийся тем, что отображение графического представления количества времени, оставшегося до последующего теста на отклонение, который должен быть выполнен, содержит этап, на котором отображают количество времени, оставшегося в предварительно установленном временном интервале до того, как предустановленный временной интервал закончится или последующий тест на отклонение успешно завершится. 5. Способ по п.4, отличающийся тем, что отображение графического представления количества времени, оставшегося до последующего теста на отклонение, который должен быть выполнен, дополнительно содержит этап, на котором повторно устанавливают в исходное состояние предустановленный временной интервал по завершении успешного теста на отклонение. 6. Способ по п.1, отличающийся тем, что управление блокировкой на основе статуса теста на отклонение содержит этап,на котором препятствуют локомотиву вступать в работу,основываясь на статусе теста на отклонение. 5 7. Способ по п.1, отличающийся тем, что управление блокировкой на основе статуса теста на отклонение содержит этап,на котором ограничивают рабочую скорость локомотива ниже предопределенной скорости, основываясь на статусе теста на отклонение. 8. Система для использования в управлении локомотивом,причем упомянутая система содержит, по меньшей мере, одну блокировку,сконфигурированную для того, чтобы регулировать рабочую скорость локомотива, отличающаяся тем,что система дополнительно содержит процессор,сконфигурированный для того, чтобы определять статус теста на отклонение для локомотива, причем упомянутый процессор дополнительно сконфигурирован для того, чтобы управлять работой упомянутой блокировки, основываясь на статусе теста на отклонение. 9. Система по п.8, отличающаяся тем, что упомянутый процессор дополнительно сконфигурирован для того, чтобы определять количество времени, оставшегося до последующего теста на отклонение, который должен быть выполнен. 10. Система по п.9, отличающаяся тем, что упомянутый процессор соединен с дисплеем,причем упомянутый процессор дополнительно сконфигурирован для того, чтобы отображать количество времени, оставшегося до последующего теста на отклонение, который должен быть выполнен. 11. Система по п.10, отличающаяся тем, что упомянутый процессор дополнительно сконфигурирован для того, чтобы определять количество времени, оставшегося в предварительно установленном интервале, в течение которого последующий тест на отклонение должен быть выполнен и отображать количество времени, оставшегося в предварительно установленном интервале, прежде чем предварительно установленный временной интервал закончится или последующий тест на отклонение успешно завершится. 12. Система по п.11, отличающаяся тем, что упомянутый процессор дополнительно сконфигурирован, чтобы повторно устанавливать в исходное состояние предустановленный временной интервал по завершении успешного теста на отклонение. 13. Система по п.8, отличающаяся тем, что упомянутый процессор дополнительно сконфигурирован,чтобы управлять работой упомянутой блокировки, чтобы препятствовать вступлению локомотива в работу, пока не будет выполнено успешное завершение теста на отклонение. 14. Система по п.8, отличающаяся тем, что упомянутый процессор дополнительно сконфигурирован, чтобы управлять упомянутой блокировкой, чтобы препятствовать превышению локомотивом предопределенной рабочей скорости,основываясь на статусе теста на отклонение. 15. Блокировочная система для использования с транспортным средством, причем упомянутая блокировочная система содержит, по меньшей мере,одну блокировку, сконфигурированную для того,чтобы регулировать рабочую скорость транспортного средства, отличающаяся тем, что система дополнительно содержит процессор,сконфигурированный для определения статуса теста на отклонение транспортного средства, причем упомянутый процессор дополнительно сконфигурирован для управления работой упомянутой блокировки, основываясь на статусе теста на отклонение. 16. Система по п.15, отличающаяся тем, что упомянутый процессор дополнительно сконфигурирован для определения количества времени, оставшегося до последующего теста на отклонение, который должен быть выполнен. 17. Система по п.16, отличающаяся тем, что упомянутый процессор дополнительно сконфигурирован для того, чтобы определять количество времени, оставшегося в предварительно установленном интервале, в течение которого последующий тест на отклонение должен быть выполнен и отображать количество времени, оставшегося в предварительно установленном интервале, прежде чем предварительно установленный временной интервал закончится или последующий тест на отклонение успешно завершится. 18. Система по п.17, отличающаяся тем, что упомянутый процессор дополнительно сконфигурирован, чтобы повторно устанавливать в исходное состояние предварительно установленный временной интервал по завершении успешного теста на отклонение. 19. Система по п.15, отличающаяся тем, что упомянутый процессор дополнительно сконфигурирован для управления работой упомянутой блокировки, чтобы препятствовать вступлению локомотива в работу, пока не будет выполнено успешное завершение теста на отклонение. 20. Система по п.15, отличающаяся тем, что упомянутый процессор дополнительно сконфигурирован для управления упомянутой блокировкой, чтобы предотвратить превышение локомотивом предопределенной рабочей скорости,основываясь на статусе теста на отклонение.
МПК / Метки
МПК: B61L 27/04, B61L 25/04
Метки: способ, использования, транспортным, локомотивом, блокировочная, управления, средством, система
Код ссылки
<a href="https://kz.patents.su/7-26690-sposob-i-sistema-dlya-upravleniya-lokomotivom-i-blokirovochnaya-sistema-dlya-ispolzovaniya-s-transportnym-sredstvom.html" rel="bookmark" title="База патентов Казахстана">Способ и система для управления локомотивом и блокировочная система для использования с транспортным средством</a>
Способ и система управления автоматизированным транспортным средством, способ определения его положения и ориентировки, способы планирования и прокладывания пути для него при движении по лабиринту
Номер патента: 14902
Опубликовано: 15.10.2004
Авторы: ТУИГГЕР, Майкл, КАНАРАТ, Эмнарт, СТЁДЖИС, Роберт Х.
МПК: B62D 12/00, B62D 11/00, B62D 11/20...
Метки: способы, ориентировки, планирования, лабиринту, него, положения, система, пути, движении, прокладывания, управления, автоматизированным, средством, транспортным, способ, определения
Формула / Реферат:
Настоящее изобретение относится к автоматизированным машинам непрерывного действия испособу их использования в подземных условиях.Каждая подвижная портальная подвесная рама(ПППР) 10 имеет средства измерения расстояния 70и угла 74 для определения расположения ПППР 10 иуглового положения присоединенных контрейлерных конвейеров 30. Для регулирования высоты контрейлерных конвейеров 30 используют средство дляопределения высоты кровли 76. На каждой...
Способ для расширенного, основанного на обмене информацией, управления транспортным средством
Номер инновационного патента: 22457
Опубликовано: 15.04.2010
Авторы: ХЕГГЕСТАД, Роберт, Е., ЭГНОТ, Джеймс Р., МАТЕСОН, Уилльям Л., ПОЛИВКА, Алан А., БЕЙКЕР, Джеффри К.
МПК: B61L 25/04, B61L 27/04
Метки: расширенного, способ, управления, обмене, транспортным, средством, информацией, основанного
Формула / Реферат:
Предложен способ управления движением множества транспортных средств по направляющему пути, разделенному на множество блоков направляющего пути. Способ использует систему управления, включающую в себя бортовой компьютер (ОВС), расположенный на борту каждого транспортного средства, по меньшей мере, один сервер для связи с ОВС и систему слежения за расположениями транспортных средств. Способ включает шаги, на которых определяют совместный статус...
Способ очистки проезжей поверхности колесным транспортным средством и устройство для его осуществления
Номер предварительного патента: 11861
Опубликовано: 15.08.2002
Автор: Халидуллин Олег Ханышевич
МПК: E01H 1/00
Метки: средством, осуществления, способ, проезжей, колесным, очистки, транспортным, поверхности, устройство
Формула / Реферат:
Изобретение относится к работам по очистке дорог, площадей, аэродромов и других поверхностей, предназначенных для проезда колесного транспорта, от загрязнений, преимущественно в виде грязи и мокрого снега.Техническим результатом изобретения является возможность сбора загрязнений и концентрации их на обочине проезжей части без использования специального сложного оборудования.Это достигается тем, что в способе очистки проезжей поверхности колесным...
Система и способ автоматического запуска/остановки локомотивных двигателей
Номер инновационного патента: 22755
Опубликовано: 16.08.2010
Авторы: ВУЛФ, Дэниел, Ф., ХЕСС, Джералд, Джеймс, мл., ТВИЧЕЛ, Джеффри, А.
МПК: B61L 27/04, B61C 17/12
Метки: способ, система, локомотивных, двигателей, автоматического
Формула / Реферат:
Способ и система для автоматического запуска и остановки системы в локомотиве, содержащие дезактивизацию системы автоматической остановки двигателя в ответ на принятую команду предотвратить автоматическое отключение локомотива системой автоматической остановки двигателя без отключения непрерывной работы двигателя. Изобретение относится также к устройству для управления локомотивом, снабженному системой автоматической остановки двигателя....
Система управления вертикальным положением электрода дуговой печи, дуговая печь, содержащая систему управления, и способ управления вертикальным положением электрода дуговой печи
Номер патента: 26187
Опубликовано: 14.09.2012
Авторы: ПЕРРИ, Кевин, Филипп, Дэниел, ВЕРМЕЛЕН, Теунис, Йоханнес
МПК: F27D 19/00, F27B 3/28, F27D 11/10...
Метки: управления, систему, печи, содержащая, система, печь, положением, способ, вертикальным, дуговой, электрода, дуговая
Формула / Реферат:
Система управления и способ для управления вертикальным положением по меньшей мере одного электрода дуговой печи, причем дуговая печь содержит печной трансформатор, имеющий первичную, входную сторону и вторичную, выходную сторону, которая электрически соединена с одним, по меньшей мере, электродом, причем система управления содержит: по меньшей мере, одно устройство измерения тока для измерения тока, потребляемого дуговой печью; устройство...
Предыдущий патент: Установка пневмовакуумной сепарации сыпучих материалов.
Следующий патент: Способ получения редких металлов
Случайный патент: Способы и водные растворы кислот для кислотной обработки скважин, содержащих осадок и эмульгированную нефть