Мультикоптер “Айдахар-1″
Формула / Реферат
Изобретение относится к области авиастроения, а именно к беспилотным летательным аппаратам и может быть применено в качестве средства вспомогательного контроля и мониторинга в научно-технических, промышленных, развлекательных и других целей.
Техническим результатом является расширение ассортимента технических решений, высокие эксплуатационные и сервисные характеристики в условиях сильных и переменчивых ветров и хаотичных восходящих и нисходящих воздушных потоков.
Это достигается тем, что беспилотный летательный аппарат, содержащий корпус, грузовой отсек, согласно изобретению, дополнительно снабжен бесколлекторными электродвигателями, видеокамерой, подвесом и посадочными штангами, закрепленными на корпусе, при этом корпус выполнен в форме скрещенных между собой двух эллипсов, а грузовой отсек выполнен в полусферической форме, закреплен посередине корпуса и снабжен аккумулятором и полетным контроллер-процессором, связанным с датчиками.
Текст
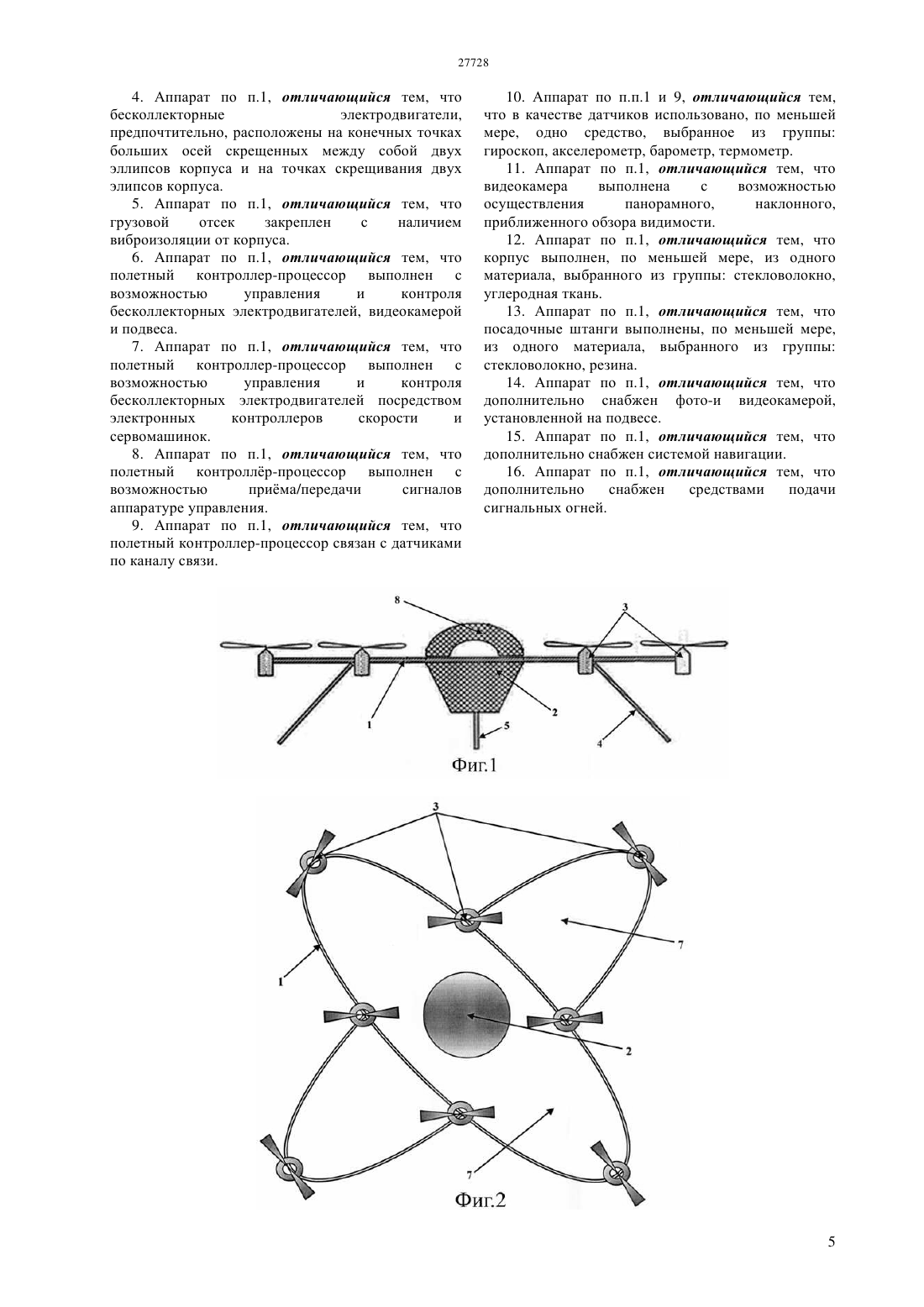
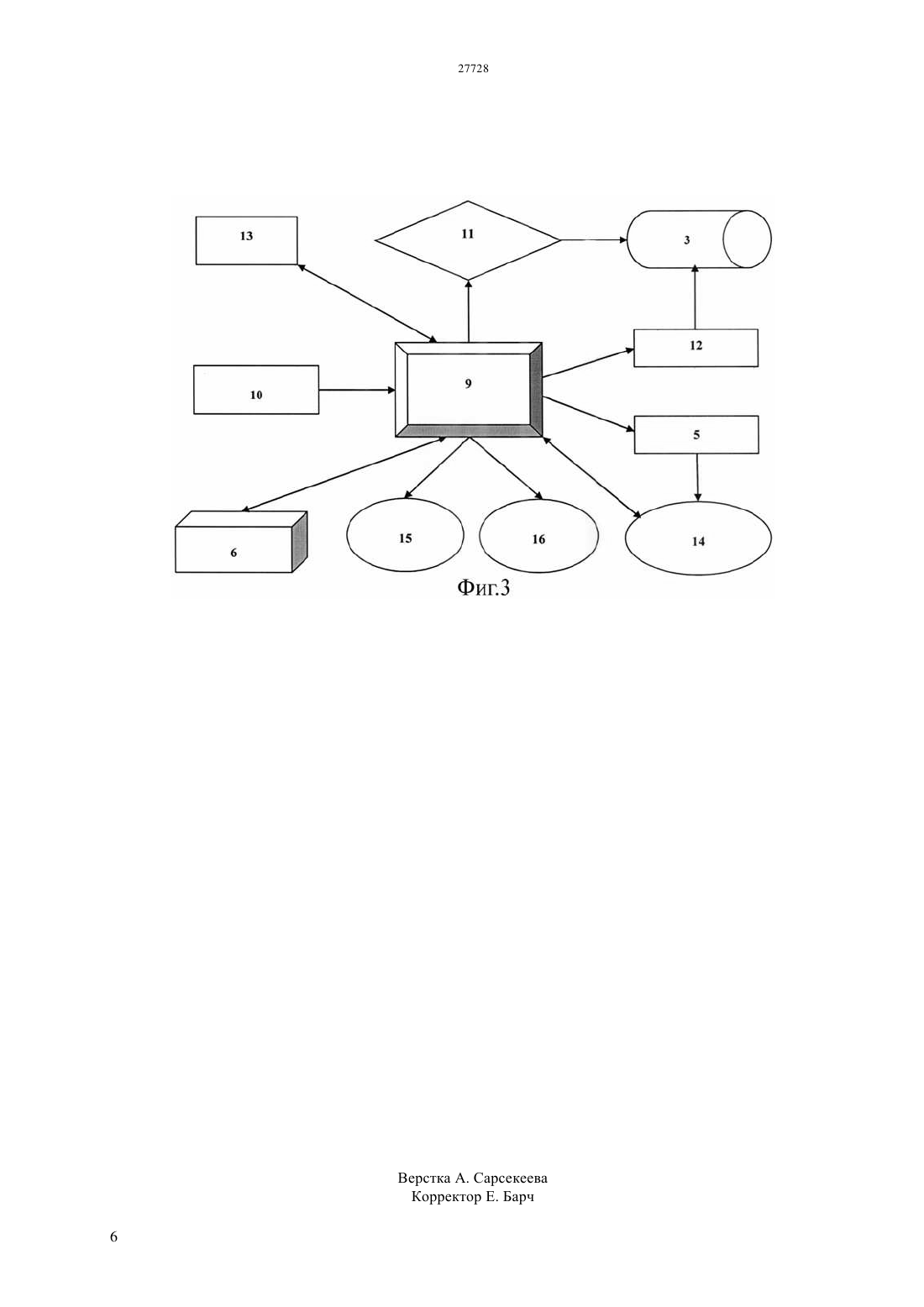
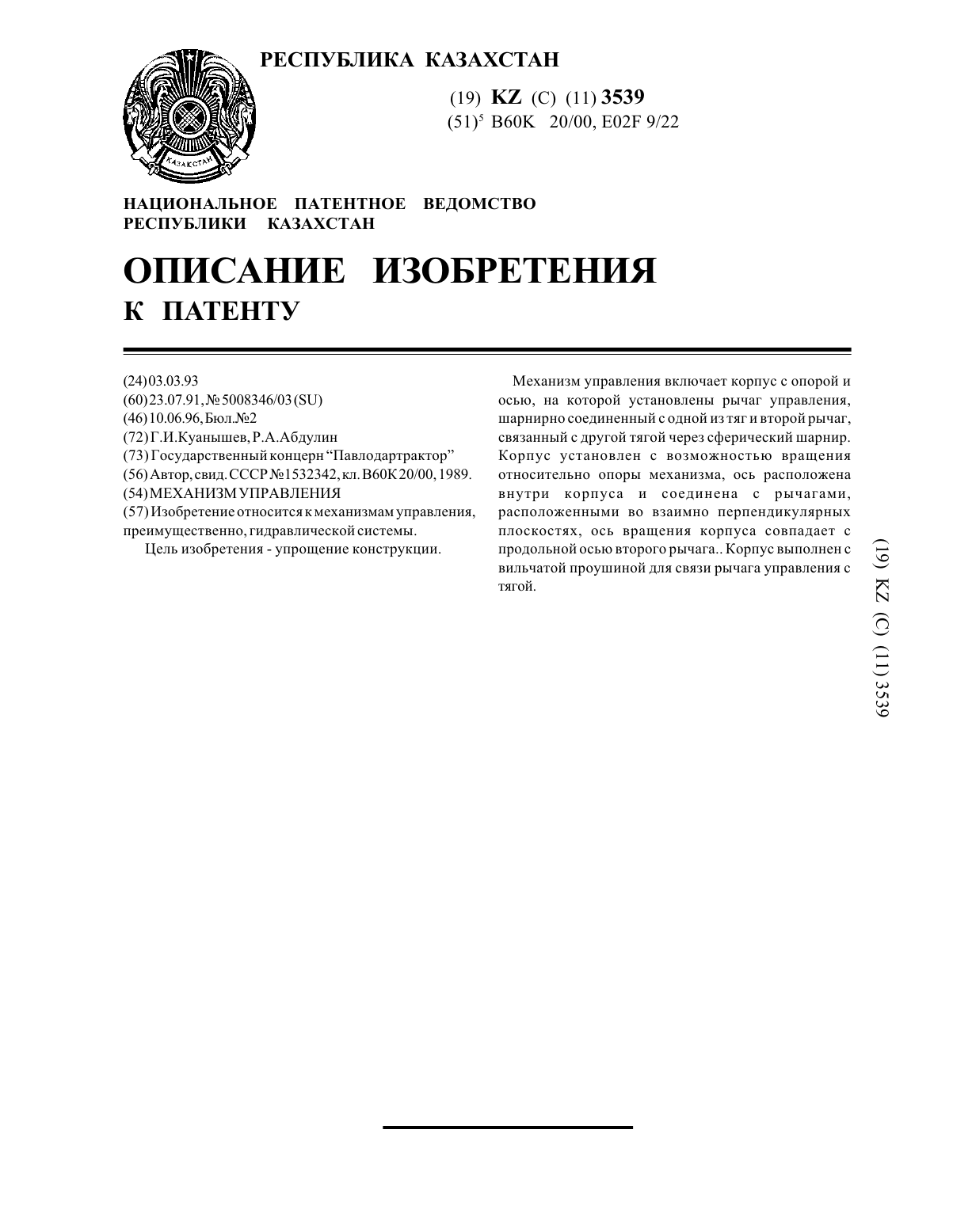
(51) 64 27/22 (2006.01) 64 27/08 (2006.01) КОМИТЕТ ПО ПРАВАМ ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ МИНИСТЕРСТВА ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ИННОВАЦИОННОМУ ПАТЕНТУ эксплуатационные и сервисные характеристики в условиях сильных и переменчивых ветров и хаотичных восходящих и нисходящих воздушных потоков. Это достигается тем, что беспилотный летательный аппарат, содержащий корпус, грузовой отсек, согласно изобретению, дополнительно снабжен бесколлекторными электродвигателями,видеокамерой, подвесом и посадочными штангами,закрепленными на корпусе, при этом корпус выполнен в форме скрещенных между собой двух эллипсов, а грузовой отсек выполнен в полусферической форме, закреплен посередине корпуса и снабжен аккумулятором и полетным контроллер-процессором, связанным с датчиками.(74) Тусупова Меруерт Кырыкбаевна Дюсенов Еркебулан Рамазанович(57) Изобретение относится к области авиастроения, а именно к беспилотным летательным аппаратам и может быть применено в качестве средства вспомогательного контроля и мониторинга в научно-технических,промышленных,развлекательных и других целей. Техническим результатом является расширение ассортимента технических решений, высокие Изобретение относится к области авиастроения,а именно к беспилотным летательным аппаратам и может быть применено в качестве средства вспомогательного контроля и мониторинга в научно-технических,промышленных,развлекательных и других целей. В последнее время возрос интерес к использованию беспилотных летательных аппаратов для решения множества задач, выполнение которых пилотируемыми летательными аппаратами, в силу различных причин, нецелесообразно. Разработка беспилотных летательных аппаратов является одной из самых интересных областей для производителей летательных аппаратов и устройств. Наибольшее распространение нашли конструкции беспилотных летательных аппаратов самолетной и вертолетной схем. Перспективной также является схема винт в кольце. Мультикоптер это мультироторный беспилотный летательный аппарат (МБЛА) с инкапсулированной аэродинамикой и дистанционным управлением. Известен беспилотный многорежимный высокоманевренный летательный аппарат,содержащий корпус, шасси, несущие плоскости,расположенные симметрично в плоскости,перпендикулярной к строительной оси аппарата,механизацию несущих плоскостей для обеспечения взлета, посадки и маневрирования, оперение,силовую установку, имеющую по крайней мере один воздушно-реактивный двигатель с отклонением вектора тяги и воздухозаборник,систему управления и бортовое оборудование,предназначенное для самостоятельного взлета,навигации в автономном полете, возврат на аэродром базирования и самостоятельную посадку,при этом корпус выполнен по интегральной схеме с возможностью уборки шасси,оперение расположено впереди несущих плоскостей,упомянутая механизация предназначена для полета на больших углах атаки,упомянутый воздухозаборник выполнен кольцевым с расположением плоскости входа вблизи центра масс аппарата / 2181333 С 1, 24.02.2002 г./. К недостаткам данного аналога относятся слабые эксплуатационные и сервисные характеристики в условиях сильных и переменчивых ветров и хаотичных восходящих и нисходящих воздушных потоков. Известен беспилотный летательный аппарат,содержащий свободнонесущее крыло, снабженное аэродинамическими органами управления,вертикальное оперение, мотогондолу и один двигатель с воздушным винтом. Двигатель установлен в мотогондоле. Беспилотный летательный аппарат выполнен по бесфюзеляжной аэродинамической схеме летающее крыло / 2288140 С 1, 27.11.2006 г./. К недостаткам данного аналога относятся слабые эксплуатационные и сервисные характеристики в условиях сильных и переменчивых ветров и хаотичных восходящих и нисходящих воздушных потоков. 2 Известен беспилотный летательный аппарат типа Винтокрыл, состоящий из свободнонесущего крыла, снабженного аэродинамическими органами управления, маршевого и подъмного двигателей и полезной нагрузки, при этом подъмный двигатель установлен, в центре масс аппарата, а маршевый - на задней кромке крыла, которая через стержни соединена со стабилизатором, выполненным в виде пластины, установленной к продольной оси аппарата под углом, при этом, на боковых частях крыла в районе его задней кромки установлены аэродинамические органы управления / 69840 1, 10.01.2008 г./. К недостаткам данного аналога относятся слабые эксплуатационные и сервисные характеристики в условиях сильных и переменчивых ветров и хаотичных восходящих и нисходящих воздушных потоков. Известен беспилотный летательный аппарат вертикального взлета и посадки, содержащий кольцевой корпус, верхнее и нижнее кольцевые крылья, грузовой отсек с расположенной в нем силовой установкой привода вентилятора, лопасти которого расположены в центральном проеме кольцевого корпуса, при этом на верхней плоскости грузового отсека, выполняющей роль нижнего кольцевого крыла,выполнены отверстия,сообщающиеся с кольцевой камерой, а ближе к центральной оси эта же плоскость имеет щелевые проемы, открываемые и закрываемые жалюзями,которые воздуховодами сообщаются с полостью в днище грузового отсека / 2089458 С 1,10.09.1997 г./. К недостаткам данного аналога относятся слабые эксплуатационные и сервисные характеристики в условиях сильных и переменчивых ветров и хаотичных восходящих и нисходящих воздушных потоков. Задачей изобретения является создание мультикоптера с улучшенными техническими характеристиками. Техническим результатом является расширение ассортимента технических решений, высокие эксплуатационные и сервисные характеристики в условиях сильных и переменчивых ветров и хаотичных восходящих и нисходящих воздушных потоков. Это достигается тем, что беспилотный летательный аппарат, содержащий корпус, грузовой отсек, согласно изобретению, дополнительно снабжен бесколлекторными электродвигателями,видеокамерой, подвесом и посадочными штангами,закрепленными на корпусе, при этом корпус выполнен в форме скрещенных между собой двух эллипсов, а грузовой отсек выполнен в полусферической форме, закреплен посередине корпуса и снабжен аккумулятором и полетным контроллер-процессором, связанным с датчиками. Беспилотный летательный аппарат снабжен,предпочтительно,восемью бесколлекторными электродвигателями, при этом бесколлекторные электродвигатели, предпочтительно, снабжены двухлопастными винтами, и, предпочтительно, 27728 расположены на конечных точках больших осей скрещенных между собой двух эллипсов корпуса и на точках скрещивания двух элипсов корпуса. Грузовой отсек закреплен с наличием виброизоляции от корпуса. Полетный контроллер-процессор выполнен с возможностью управления и контроля бесколлекторных электродвигателей, видеокамерой и подвеса, при этом полетный контроллерпроцессор выполнен с возможностью управления и контроля бесколлекторных электродвигателей посредством электронных контроллеров скорости и сервомашинок. Полетный контроллер-процессор выполнен с возможностью приема/передачи сигналов аппаратуре управления, и связан с датчиками по каналу связи, а в качестве датчиков использовано, по меньшей мере, одно средство,выбранное из группы гироскоп, акселерометр,барометр, термометр. Видеокамера выполнена с возможностью осуществления панорамного,наклонного,приближенного обзора видимости. Корпус выполнен, по меньшей мере, из одного материала, выбранного из группы стекловолокно,углеродная ткань, а посадочные штанги выполнены,по меньшей мере, из одного материала, выбранного из группы стекловолокно, резина. Беспилотный летательный аппарат дополнительно снабжен фото- и видеокамерой,установленной на подвесе, и/или системой навигации и/или средствами подачи сигнальных огней. Технические базовые характеристики мультикоптера ориентировочный размер 12001200400 мм наличие двухлопастных винтов питания электроэнергии от аккумуляторов полетный вес примерно 3 кг с максимальной полезной нагрузкой полезная нагрузка фотокамера,видеокамера, подвесы, датчики, сенсоры, системы телеметрии, системы связи, мелкие грузы и т.д.) вес полезной нагрузки до 2 кг (камера,управляемый подвес,аппаратура передачи видеосигнала на землю) время полета без полезной нагрузки или с малой нагрузкой до 30 мин время полета с максимальной полезной нагрузкой до 10 мин дистанция полета в зависимости от дальности действия аппаратуры управления- сопротивление ветру до 10-15 м/с (до 6-7 баллов по шкале Бофорта). На фиг.1 изображн беспилотный летательный аппарат (мультикоптер) (вид спереди). На фиг.2 изображн беспилотный летательный аппарат (мультикоптер) (вид сверху). На фиг.3 изображна схема связи полетного контроллер-процессера с другими узлами беспилотного летательного аппарата. Беспилотный летательный аппарат(2), восемь бесколлекторных электродвигателей с двухлопастными винтами штангами (4), подвесом (5) видеокамерой (6),закрепленными на корпусе (1), при этом корпус (1) выполнен в форме скрещенных между собой двух эллипсов (7), а грузовой отсек (2) выполнен в полусферической форме (8), закреплен посередине корпуса (1) и снабжен аккумулятором (не показан на фигурах) и полетным контроллер- процессором (9),связанным с датчиками (10). Бесколлекторные электродвигатели расположены на конечных точках больших осей скрещенных между собой двух эллипсов (7) корпуса(1) и на точках скрещивания двух элипсов (7) корпуса (1). Грузовой отсек (2) закреплен с наличием виброизоляции от корпуса (1). Полтный контроллер-процессор (9) выполнен с возможностью управления и контроля бесколлекторных электродвигателей (3), подвеса (5) и видеокамерой (6), при этом полетный контроллерпроцессор(9) выполнен с возможностью управления и контроля бесколлекторных электродвигателей (3) посредством электронных контроллеров скорости (11) и сервомашинок (12). Полтный контроллер-процессор (9) выполнен с возможностью приема/передачи сигналов аппаратуре управления (13), и связан с датчиками(10) по каналу связи, а в качестве датчиков (10) использовано, по меньшей мере, одно средство,выбранное из группы гироскоп, акселерометр,барометр, термометр. Видеокамера (6) выполнена с возможностью осуществления панорамного,наклонного,приближнного обзора видимости. Корпус (1) выполнен, по меньшей мере, из одного материала, выбранного из группы стекловолокно, углеродная ткань, а посадочные штанги (4) выполнены, по меньшей мере, из одного материала, выбранного из группы стекловолокно,резина. Беспилотный летательный аппарат дополнительно снабжн фото- и видеокамерой (14),установленной на подвесе (5), и/или системой навигации (15) и/или средствами подачи сигнальных огней (16). Изобретение осуществляется следующим образом. Настоящее изобретение поясняется конкретным примером, который наглядно демонстрирует возможность достижения приведенной совокупностью признаков требуемого технического результата, однако не является единственно возможным. Пример. Сигнал от аппаратуры управления поступает на полтный контроллерпроцессор,который включает и регулирует скорость вращения бесколлекторных электродвигателей, а также регулирует ориентацию управляемого подвеса в зависимости от характера управляющего сигнала (от аппаратуры управления) и данных от датчиков(гироскопы, акселерометры, барометр и т.д.). Регулировка тока на бесколлекторные электродвигатели регулируется электронными контроллерами скоростис управлением от 3 полетного контроллера-процессора. Бесколлекторные электродвигатели с двухлопастным винтом закреплены на корпусе,представляющего собой два скрещнных между собой эллипса. Полтный контроллер-процессор с датчиками расположен в грузовом отсеке полусферической формы,расположенной посередине корпуса с виброизоляцией от корпуса. 4 бесколлекторные электродвигатели расположены на конечных точках больших осей двух скрещнных между собой эллипсов,а остальные 4 бесколлекторных электродвигателей расположены в точках скрещения между собой двух эллипсов. Вращение 8-ми бесколлекторных двигателей,питаемых от аккумуляторов, с двухлопастными винтами приводит к подъему и управляемому полту мультикоптера. Для удерживания поворотов мультикоптера по 3-м геометрическим осям используются три гироскопа. Сигналы от трех гироскопов ( - крен, - тангаж и- рыскание) поступают в полтный контроллер-процессор. В полтном контроллр-процессоре установлено программное обеспечение,благодаря которому полтный контроллер-процессор подает сигналы управления на электронные контроллеры скорости . Для горизонтальной стабилизации мультикоптера используются акселерометры, соединнные с полетным контроллер-процессором. Для контроля высоты полта мультикоптера используется барометр с точностью плюс-минус 10 см и с компенсацией температурного дрейфа. Снизу к корпусу мультикоптера жстко закреплн управляемый подвес, позволяющий установить на нем фото- или видеокамеру с возможностью его манипулирования. Управление полтом происходит по дифференциальному принципу. За счет изменения скоростей вращений боковых бесколлекторных двигателей. При этом мультикоптер наклоняется и входит в режим горизонтального скольжения. Изменение направления движения происходит за счет регулирования скорости вращения винтов в противофазе. Преимуществами заявленного изобретения являются- эксплуатация в широком диапазоне температур воздуха и со скоростью ветровых потоков до 20-25 метров в секунду- устойчивость к резким горизонтальным и вертикальным колебаниям воздушного потока из-за большой инерционности мультикоптера- поднятие на высоту птичьего полета- возможность автономного режима полета мультикоптера с помощью системы навигации- наличие режима зависания мультикоптера на заданной высоте и над определенной точкой поверхности наличие режима дифференциального управления мультикоптера для контролируемого перемещения во всех направлениях с полезной нагрузкой со средней скоростью полета до 40-50 км/час- до 30 минут полтного времени мультикоптера(в зависимости от полетной нагрузки)- до 500-700 метров максимального удаления мультикоптера от аппаратуры управления (в зависимости от режимов эксплуатации и погодных условий) автономный полт по маршруту,обозначенному точками на карте с остановками в данных точках на заданное оператором время и совершение в местах остановки действий по аэрофотосъемке и т.п. в зоне, ограниченной диаметром 500 метров- удерживание заданной оператором высоты и положения по координатам- автоматическая плавная посадка мультикоптера с программируемой скоростью при потере контроля- возможность продолжения полета при неисправности одного или двух бесколлекторных электродвигателей- съемка и мониторинг промышленных строек и промышленных объектов, которые находятся преимущественно в зонах сильных и неустойчивых ветров- широкая область применения заявленного изобретения(кинематография,аэрофотовидеосъмка, мониторинг чрезвычайных ситуаций, состояния полей в агропромышленном комплексе, археологических и исторических участков, высотные работы и трассировка местности для создания 3-изображения поверхностей,участков и объектов, мониторинг популяций диких животных и экологии местности, транспортировка мелких грузов, в труднодоступные места или в условиях чрезвычайных ситуаций) ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Беспилотный летательный аппарат,содержащий корпус,грузовой отсек,отличающийся тем, что дополнительно снабжен бесколлекторными электродвигателями,видеокамерой, подвесом и посадочными штангами,закрепленными на корпусе, при этом корпус выполнен в форме скрещнных между собой двух эллипсов, а грузовой отсек выполнен в полусферической форме, закреплен посередине корпуса и снабжен аккумулятором и полетным контроллер-процессором, связанным с датчиками. 2. Аппарат по п.1, отличающийся тем, что снабжен,предпочтительно,восемью бесколлекторными электродвигателями. 3. Аппарат по п.1, отличающийся тем, что бесколлекторные электродвигатели,предпочтительно,снабжены двухлопастными винтами. 4. Аппарат по п.1, отличающийся тем, что бесколлекторные электродвигатели,предпочтительно, расположены на конечных точках больших осей скрещенных между собой двух эллипсов корпуса и на точках скрещивания двух элипсов корпуса. 5. Аппарат по п.1, отличающийся тем, что грузовой отсек закреплен с наличием виброизоляции от корпуса. 6. Аппарат по п.1, отличающийся тем, что полетный контроллер-процессор выполнен с возможностью управления и контроля бесколлекторных электродвигателей, видеокамерой и подвеса. 7. Аппарат по п.1, отличающийся тем, что полетный контроллер-процессор выполнен с возможностью управления и контроля бесколлекторных электродвигателей посредством электронных контроллеров скорости и сервомашинок. 8. Аппарат по п.1, отличающийся тем, что полетный контроллр-процессор выполнен с возможностью прима/передачи сигналов аппаратуре управления. 9. Аппарат по п.1, отличающийся тем, что полетный контроллер-процессор связан с датчиками по каналу связи. 10. Аппарат по п.п.1 и 9, отличающийся тем,что в качестве датчиков использовано, по меньшей мере, одно средство, выбранное из группы гироскоп, акселерометр, барометр, термометр. 11. Аппарат по п.1, отличающийся тем, что видеокамера выполнена с возможностью осуществления панорамного,наклонного,приближенного обзора видимости. 12. Аппарат по п.1, отличающийся тем, что корпус выполнен, по меньшей мере, из одного материала, выбранного из группы стекловолокно,углеродная ткань. 13. Аппарат по п.1, отличающийся тем, что посадочные штанги выполнены, по меньшей мере,из одного материала, выбранного из группы стекловолокно, резина. 14. Аппарат по п.1, отличающийся тем, что дополнительно снабжен фото-и видеокамерой,установленной на подвесе. 15. Аппарат по п.1, отличающийся тем, что дополнительно снабжен системой навигации. 16. Аппарат по п.1, отличающийся тем, что дополнительно снабжен средствами подачи сигнальных огней.
МПК / Метки
МПК: B64C 27/08, B64C 27/22
Метки: мультикоптер, айдахар-1
Код ссылки
<a href="https://kz.patents.su/6-ip27728-multikopter-ajjdahar-1.html" rel="bookmark" title="База патентов Казахстана">Мультикоптер “Айдахар-1″</a>
Механизм управления
Номер патента: 3539
Опубликовано: 10.06.1996
Авторы: Абдулин Ренат Абузарович, Куанышев Ганижан Имранович
МПК: B60K 20/00, E02F 9/22
Метки: управления, механизм
Формула / Реферат:
Изобретение относится к механизмам управления, преимущественно, гидравлической системы.Цель изобретения - упрощение конструкции.Механизм управления включает корпус с опорой и осью, на которой установлены рычаг управления, шарнирно соединенный с одной из тяг и второй рычаг, связанный с другой тягой через сферический шарнир. Корпус установлен с возможностью вращения относительно опоры механизма, ось расположена внутри корпуса и соединена с...
Устройство для управления топливораздаточной колонкой
Номер полезной модели: 5
Опубликовано: 15.03.1994
Автор: Быковский Георгий Иванович
Метки: устройство, колонкой, управления, топливораздаточной
Формула / Реферат:
Полезная модель относится к замкам накладным с дисковым механизмом. Технический результат - повышение надежности запирания при помощи ключа. В замке накладном, содержащем пластину, на которой размещена коробка, включающая механизм секрета, состоящий из корпуса, сепаратора со шпонкой, входящей в паз корпуса, и расположенными в нем рабочими и промежуточными дисками, корпус механизма секрета выполнен с дополнительным пазом и с возможностью поворота...
Замок накладной
Номер полезной модели: 54
Опубликовано: 15.07.1999
Автор: Степанов Валерий Николаевич
МПК: E05B 55/00
Формула / Реферат:
Полезная модель относится к замкам накладным с дисковым механизмом.Технический результат - повышение надежности запирания при помощи ключа.В замке накладном, содержащем пластину, на которой размещена коробка, включающая механизм секрета, состоящий из корпуса, сепаратора со шпонкой, входящей в паз корпуса, и расположенными в нем рабочими и промежуточными дисками, корпус механизма секрета выполнен с дополнительным пазом и с возможностью поворота...
Способ перераспределения обслуживающей подсистемы радиосети
Номер патента: 17812
Опубликовано: 15.09.2006
Авторы: ХАН, Хио-Санг, ЛИ, Со-Янг, ЙЕО, Воон-Янг, ЙИ, Сеунг-Дзун
МПК: H04L 1/16, H04L 29/06, H04Q 7/38...
Метки: радиосети, обслуживающей, способ, подсистемы, перераспределения
Формула / Реферат:
Описывается способ выполнения перераспределения обслуживающей подсистемы радиосети (ОПРС) для эффективного использования радиоресурса в универсальной системе подвижной связи асинхронной системы МПС-2000, включающий в себя: определение перераспределения обслуживающей подсистемы радиосети в сети; передачу на терминал сообщения управления радиоресурсом, соответствующего перераспределению ОПРС, для того, чтобы контроллер радиосети обменивался...
Летательный аппарат (варианты)
Номер инновационного патента: 25652
Опубликовано: 16.04.2012
Авторы: Құрмет Серікболсын Құрметұлы, Құрмет Марғұлан Құрметұлы
МПК: B64C 27/00, B64C 27/22
Метки: варианты, летательный, аппарат
Формула / Реферат:
Летательный аппарат, предназначено для полетов и проведения мониторинговых, исследовательских, разведывательных, транспортных и других работ на воздушном пространстве, с целью повышение безопасности, функциональности и эффективности летательного аппарата самолетного типа, на крыльях или фюзеляже летательного аппарата установлен несущий винт, снабженный механизмом подъема и опускания, а в другом варианте винт снабжен автономным двигателем или...
Предыдущий патент: Опорно-двигательный механизм ноги двуного робота
Следующий патент: Навесное загрузочное устройство
Случайный патент: Способ подбора доз варфарина на основе генотипирования для казахской популяции