Бортовой комплекс для системы сбора данных о состоянии подвижных объектов
Номер инновационного патента: 22446
Опубликовано: 15.04.2010
Авторы: Жусупов Канат Куатжанович, Муравлёв Вячеслав Константинович, Намазбаев Тлеухан Серикбаевич, Моисеенко Владимир Юрьевич, Смагулов Насипбай Каргулович, Байжаханов Багдат Ильясович, Шабельников Евгений Алексеевич, Галиев Сейтгали Жолдасович, Колесников Владимир Александрович, Сагинова Куляш Мусиновна, Астраханцев Виталий Александрович
Формула / Реферат
Изобретение относится к технике сопровождения и управления наземными транспортными средствами, в частности, к регистрации технологического транспорта путем автоматической передачи информации о местоположении, техническом и технологическом состоянии и номере транспортной единицы, и может быть использовано в автоматизированных системах оперативного управления горнотранспортными процессами на карьерах, междугородними автобусами, межгосударственными транспортными коридорами.
Задача изобретения - расширение функциональных возможностей и повышение помехоустойчивости бортового комплекса для системы сбора данных о состоянии подвижных объектов.
Технический результат достигается тем, что в известный бортовой комплекс, содержащий датчики технологического состояния транспортного средства, навигационную антенну с GPS-приемником, радиоантенну с усилителем, устройство отображения текстовой информации, дополнительно введены трехпроцессорный контроллер с подключенными, соответственно, к первому, второму, третьему, четвертому и пятому входам-выходам трехпроцессорного контроллера блока согласования для сбора информации от системы RFID, энергонезависимой памяти, модуля индикации режимов работы, модуля согласования с системами верхнего уровня и стабилизированного источника питания, при этом шестой, седьмой, восьмой и девятый входы-выходы трехпроцессорного контроллера соединены, соответственно, с входами-выходами датчика технологического состояния транспортного средства, навигационной антенны с GPS-приемником и приемо-передающего устройства с радиоантенной.
Текст
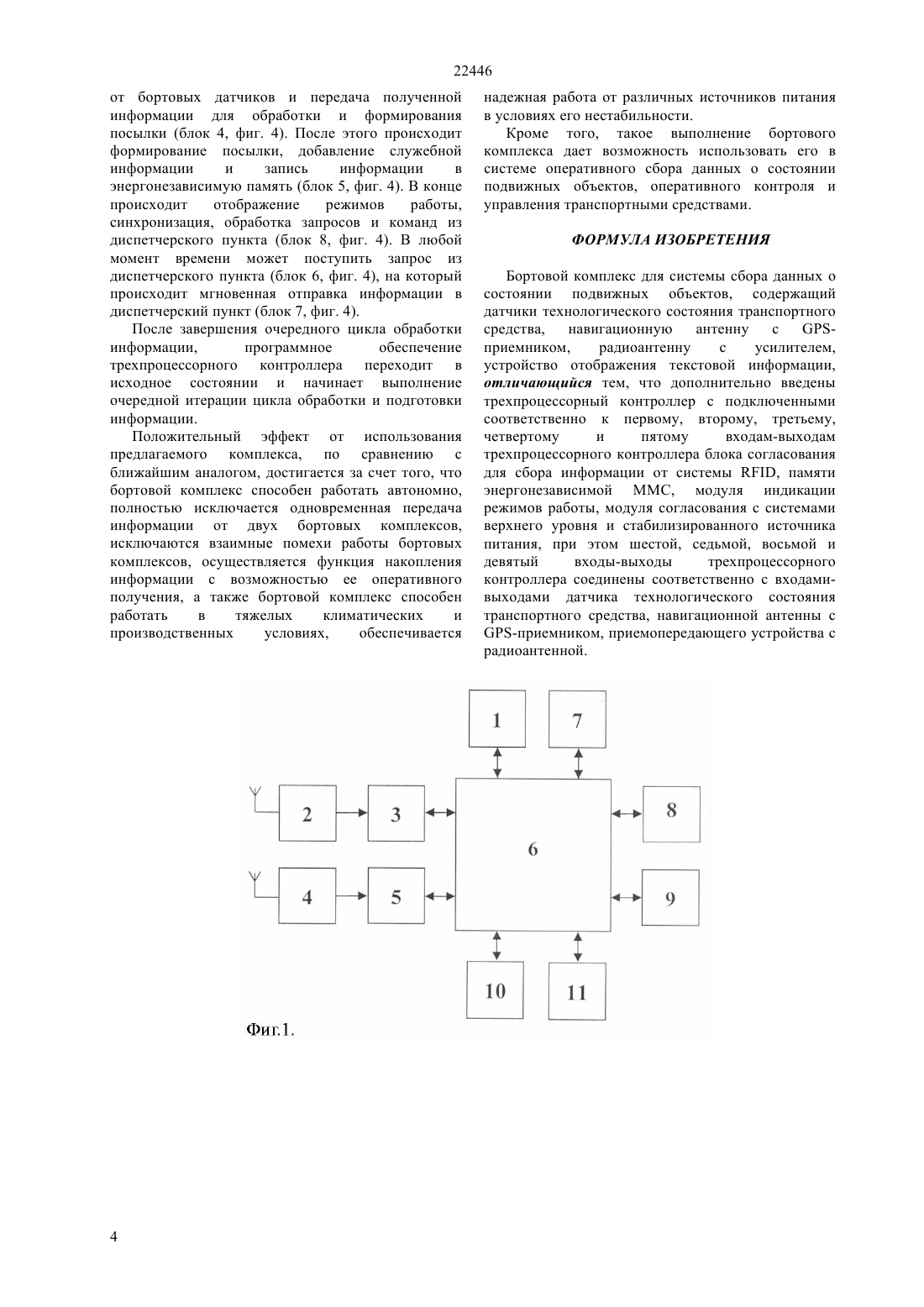
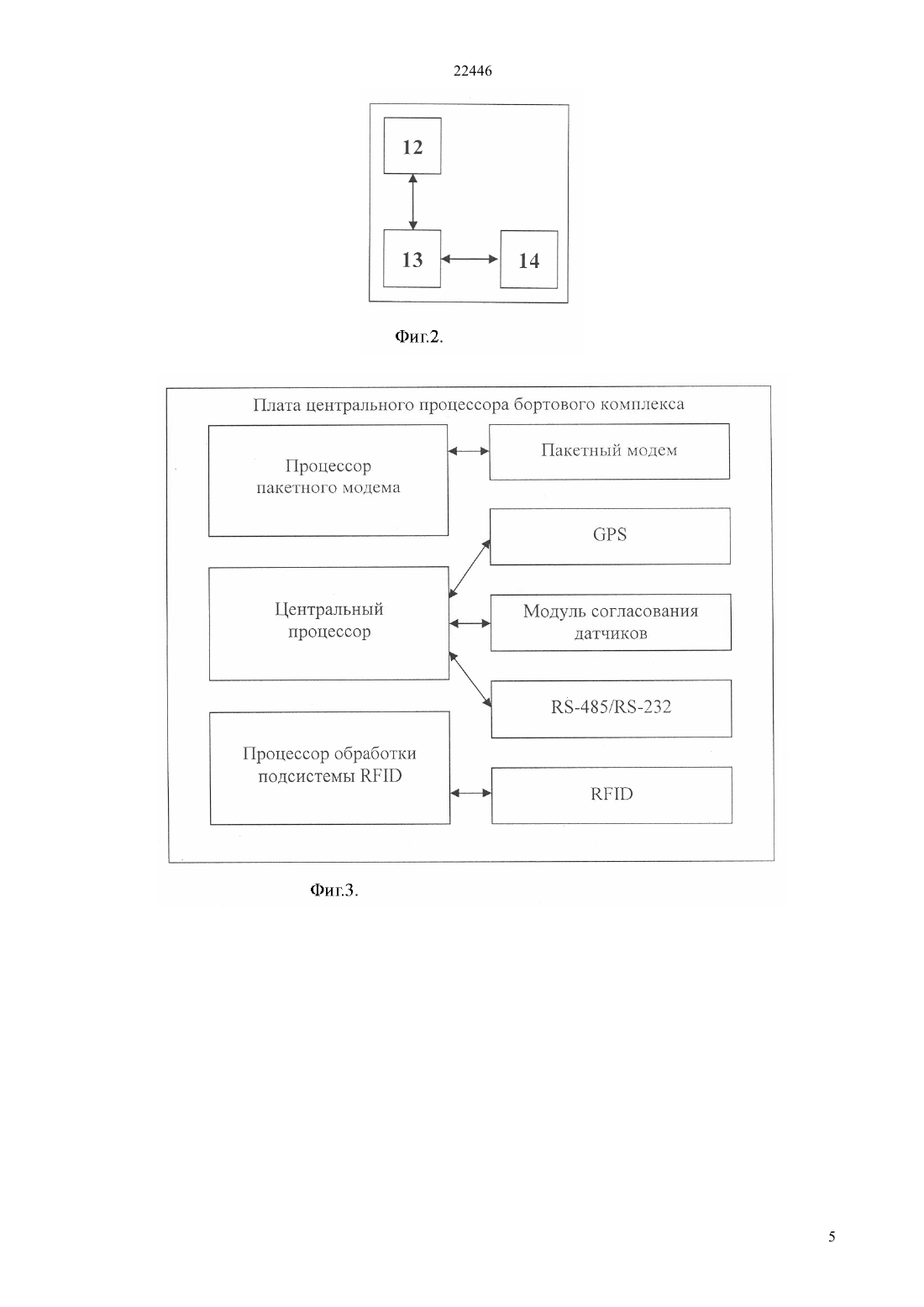
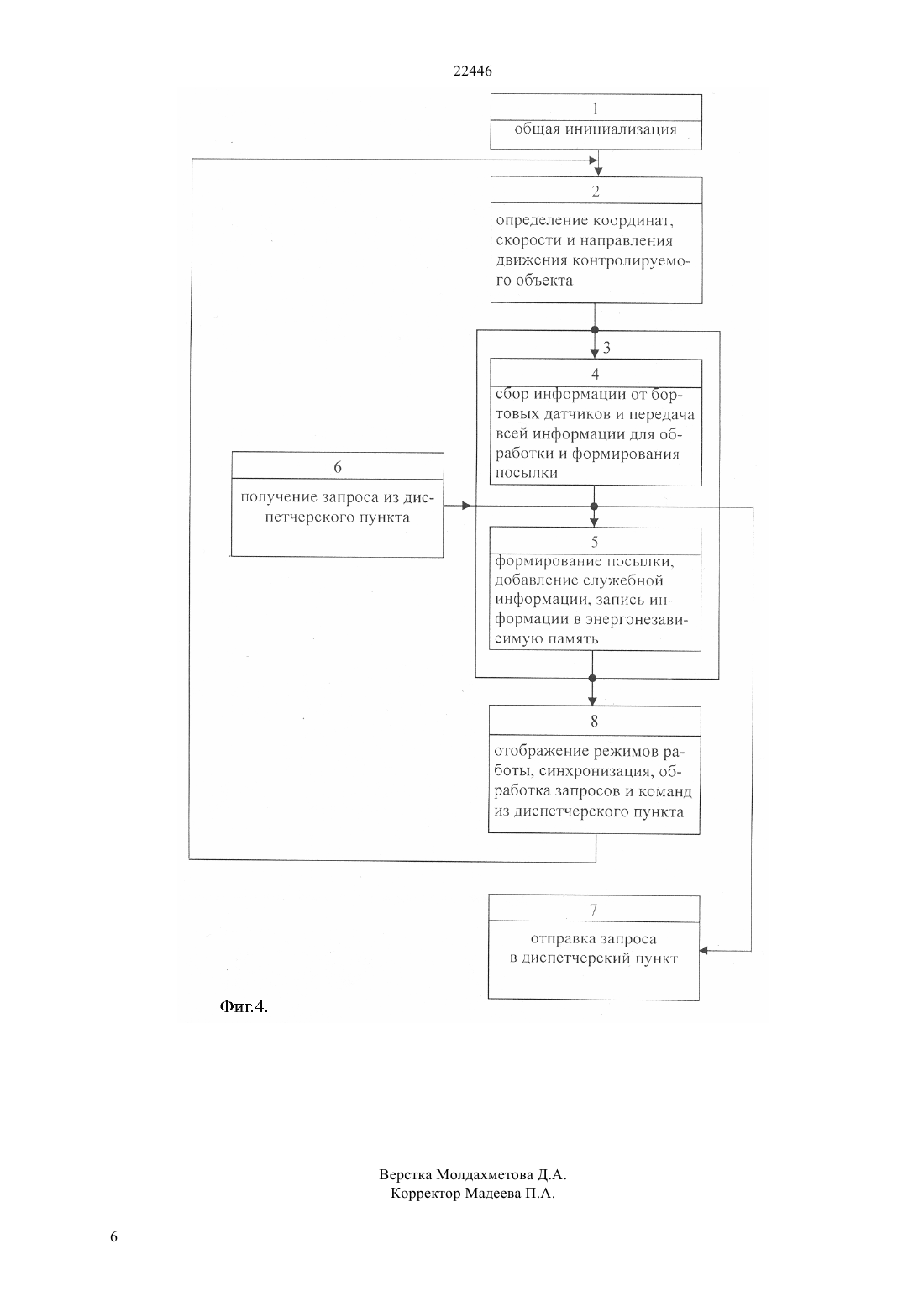
КОМИТЕТ ПО ПРАВАМ ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ МИНИСТЕРСТВА ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ИННОВАЦИОННОМУ ПАТЕНТУ быть использовано в автоматизированных системах оперативного управления горнотранспортными процессами на карьерах,междугородними автобусами, межгосударственными транспортными коридорами. Задача изобретения расширение функциональных возможностей и повышение помехоустойчивости бортового комплекса для системы сбора данных о состоянии подвижных объектов. Технический результат достигается тем, что в известный бортовой комплекс, содержащий датчики технологического состояния транспортного средства, навигационную антенну с приемником,радиоантенну с усилителем,устройство отображения текстовой информации,дополнительно введены трехпроцессорный контроллер с подключенными, соответственно, к первому, второму, третьему, четвертому и пятому входам-выходам трехпроцессорного контроллера блока согласования для сбора информации от системы , энергонезависимой памяти, модуля индикации режимов работы, модуля согласования с системами верхнего уровня и стабилизированного источника питания, при этом шестой, седьмой,восьмой и девятый входы-выходы трехпроцессорного контроллера соединены,соответственно, с входами-выходами датчика технологического состояния транспортного средства, навигационной антенны с приемником и приемо-передающего устройства с радиоантенной.(72) Колесников Владимир Александрович Галиев Сейтгали Жолдасович Намазбаев Тлеухан Серикбаевич Байжаханов Багдат Ильясович Смагулов Насипбай Каргулович Жусупов Канат Куатжанович Муравлв Вячеслав Константинович Шабельников Евгений Алексеевич Моисеенко Владимир Юрьевич Астраханцев Виталий Александрович Сагинова Куляш Мусиновна Дочернее государственное предприятие на праве хозяйственного ведения Институт горного дела им. Д.А. Кунаева Республиканского государственного предприятия Национальный центр по комплексной переработке минерального сырья Республики Казахстан(56) Предварительный патент РК 16348, кл. 08 1/123, 2005(54) БОРТОВОЙ КОМПЛЕКС ДЛЯ СИСТЕМЫ СБОРА ДАННЫХ О СОСТОЯНИИ ПОДВИЖНЫХ ОБЪЕКТОВ(57) Изобретение относится к технике сопровождения и управления наземными транспортными средствами, в частности, к регистрации технологического транспорта путем автоматической передачи информации о местоположении, техническом и технологическом состоянии и номере транспортной единицы, и может 22446 Изобретение относится к технике сопровождения и управления наземными транспортными средствами,в частности,к регистрации технологического транспорта путем автоматической передачи информации о местоположении,техническом и технологическом состоянии и номере транспортной единицы, и может быть использовано в автоматизированных системах оперативного управления горнотранспортными процессами па карьерах,междугородними автобусами,межгосударственными транспортными коридорами. Известно устройство сопровождения и управления транспортными средствами (Патент 26271, кл. 08 1/123, 2000). Устройство содержит навигационную антенну, навигационный приемник с процессором,радиоантенну,приемопередатчик с процессором,энергонезависимую память, бортовые подсистемы и бортовой контроллер, связанный соответствующим образом с перечисленными блоками и содержащий микропроцессорный элемент с входными и выходными буферами, при этом бортовой контроллер подключен к одному из выходов микропроцессорного элемента, а выход связан с входом СБРОС микропроцессорного элемента,причем блок контроля функционирования бортового контроллера включает генератор импульсов,счетчик и формирователь коротких импульсов, вход последнего является входом блока контроля функционирования бортового контроллера, а выход связан с -входом счетчика, С-вход которого связан с выходом генератора, а выход счетчика является выходом блока контроля функционирования бортового контроллера. Устройство способно передавать данные от установленных на транспортных средствах датчиков на центральный диспетчерский пункт и может быть использовано в системе автоматического управления. Недостатком данного технического решения является то,что комплекс усложнен энергонезависимой памятью и радиоприемником,информация с которого обрабатывается на микропроцессоре, что ведет к дополнительной загрузке процессора. Другим недостатком известного комплекса является то, что для его использования на транспортном средстве должен быть установлен бортовой компьютер, что ведет к удорожанию системы сопровождения и управления наземными транспортными средствами. Наиболее близким по технической сущности является бортовой комплекс для сбора данных о состоянии подвижных объектов (предварительный патент 16348, 08 1/123 опубл. в бюл.10 от 14.10.2005 г.), содержащий бортовые датчики технологического состояния транспортного средства и -приемник, выходы которых соединены с входом контроллера, выход которого связан с входом передатчика, подключенного к антенне, и устройство отображения текстовой информации, выполненное в виде пейджерного приемника и связанное с контроллером по питанию. 2 Бортовой комплекс для системы сбора данных о состоянии подвижных объектов работает следующим образом.- приемник определяет местоположение транспортного средства и передает эту информацию контроллеру, который также через буфер поступает информация от бортовых датчиков. В контроллере микропроцессор обрабатывает всю входную информацию,формирует пакет данных,представляющий собой последовательность бит,модулированную низкочастотной ЧМ-модуляцией. Сформированный в микропроцессоре ЧМ-сигнал поступает на ВЧ-ЧМ-модулятор, из которого ВЧсигнал через усилитель и антенну передается на диспетчерский пункт. Все команды с диспетчерского пункта поступают на устройство отображения текстовой информации и отображаются в виде текстового сообщения. При стабильной работе микропроцессора на блок контроля функционирования периодически подается сигнал. В случае зависания блок контроля функционирования микропроцессора, не получая сигнала,вырабатывает сигнал перезагрузки микропроцессора. К недостаткам известного технического решения следует отнести то, что время между отправкой информации одним бортовым комплексом установлено жестко, и перед каждой отправкой происходит проверка отсутствия передачи, что при некоторой задержке электроники может привести к началу передачи информации сразу несколькими бортовыми комплексами, что приводит к потере передаваемой информации, а также низкая надежность маломощного радиопередатчика. Другим недостатком известного технического решения можно считать отсутствие внутренней,быстрой,легкодоступной энергонезависимой памяти, доступ к которой возможен удаленно,например, с диспетчерского пульта. Вместе с этим описываемый бортовой комплекс не предназначен для работы на подвижных единицах, напряжение бортовой сети которых отличается от стандартных значений напряжений бортовой сети подвижных единиц, что приводит к ограниченной области применения. Таким образом, все известные устройства имеют ограниченную область применения и низкую эксплуатационную надежность. В основу изобретения поставлена задача разработать бортовой комплекс,способный работать автономно, полностью исключающий одновременную передачу информации от двух бортовых комплексов, исключающий взаимные помехи работы комплексов, с функцией накопления информации с возможностью ее оперативного получения, а также способного работать в тяжелых климатических и производственных условиях,обеспечивающий надежную работу от различных источников питания в условиях его нестабильности. Технический результат,достигаемый изобретением значительное расширение функциональных возможностей бортового комплекса для сбора данных о состоянии 22446 подвижных объектов,способного работать автономно с полным исключением одновременной передачи информации от двух и более бортовых комплексов, исключающий взаимные помехи,возможность определенного опроса заданного или требующего повышенного внимания технологического объекта, а также создание специализированного блока питания, рассчитанного на нестабильное напряжение, и корпуса бортового комплекса, способного обеспечить надежную бесперебойную работу в тяжелых промышленных и климатических условиях. Поставленная задача решается тем, что в известном бортовом комплексе, содержащем датчики технического и технологического состояния транспортного средства, навигационную антенну с-приемником,радиоантенну,устройство отображения текстовой информации,дополнительно введены трехпроцессорный контроллер с подключенными соответственно к первому, второму, третьему, четвертому и пятому входам-выходам трехпроцессорного контроллера блока согласования для сбора информации от системы , памяти энергонезависимой, модуля индикации режимов работы, модуля согласования с системами верхнего уровня и стабилизированного источника питания, при этом шестой, седьмой и восьмой входы-выходы трехпроцессорного контроллера соединены соответственно с входамивыходами датчиков технологического состояния транспортного средства, навигационной антенны с-приемником и приемо-передающим устройством с радиоантенной. На фиг.1 изображена блок-схема бортового комплекса для системы сбора данных о состоянии подвижных объектов, который содержит бортовые датчики технического и технологического состояния транспортного средства 1,навигационную антенну 2, -приемник 3,радиоантенну 4, приемо-передающее устройство 5,трехпроцессорный контроллер 6, блок согласования для сбора информации от системы 7, память энергонезависимую 8, модуль индикации режимов работы 9, модуль согласования с системами верхнего уровня 10, стабилизированный источник питания 11. Трехпроцессорный контроллер 6 состоит из трех однокристальных микропроцессоров. Структурная схема трехпроцессорного контроллера представлена на фиг.2. Трехпроцессорный контроллер состоит из процессора пакетного модема 12, центрального процессора 13 и процессора обработки подсистемы 14. Представленное техническое решение позволяет разгрузить центральный процессор,полностью исключить взаимное влияние микропроцессоров и значительно повысить быстродействие контроллера. Достигается расширение функциональных возможностей и повышение помехоустойчивости бортового комплекса для системы сбора данных о состоянии подвижных объектов. Конструктивно плата контроллера состоит из трех однокристальных микро-ЭВМ, центрального процессора с расположенным на ней приемником, модулем сопряжения с бортовыми датчиками, системой 1, и интерфейсом 232/-485,а также модулем пакетного радиомодема,обеспечивающего стабильную передачу информации на скорости 4800 бод. Упрощенная структурная схема платы трехпроцессорного контроллера представлена на фиг.3. Приемо-передающее устройство 5 может быть представлено, например, в виде промышленной радиостанции-140 и используется для непосредственной передачи информации в эфир. Блок согласования для сбора информации от системы 7 может быть представлен, например,в виде промышленного радиосчитывателя,рассчитанного на большое расстояние, и позволяет однозначно идентифицировать подвижный объект в условиях неоднозначности показаний модуля . Память энергонезависимая 8 может быть представлена, например, в виде компактной карты ММС и позволяет реализовать простой и быстрый способ сохранения информации в течение длительного периода времени и обеспечить удаленный доступ к сохраненной информации. Модуль индикации режимов работы 9 может быть представлен, например, в виде обособленной печатной платы со светодиодными индикаторами и позволяет визуально контролировать режимы работы комплекса. Модуль согласования с системами верхнего уровня 10 может быть представлен, например, в виде микропроцессора 8 серии , фирмывкупе со специализированной микросхемой МАХ 232 и позволяет получить доступ к внутренней памяти комплекса бортового с помощью переносного персонального компьютера. Стабилизированный источник питания 11 может быть представлен, например, в виде отдельного автономного модуля и позволяет обеспечивать работоспособность устройства в условиях нестабильного питания,значения которого отличаются от стандартных. Процессор пакетного модема 12 может быть представлен, например, в виде микропроцессора типа 8 серии , фирмы ,управляющего пакетным модемом. Центральный процессор 13 может быть представлен, например, в виде микропроцессора типа 128 серии , фирмы ,обладающего высоким быстродействием. Процессор обработки подсистемы 14 может быть представлен, например, в виде микропроцессора типа 8 серии , фирмы, управляющего блоком согласования 8 для сбора информации от системы . Бортовой комплекс для системы сбора данных о состоянии подвижных объектов работает по алгоритму, представленному на фиг.4. После общей инициализации (блок 1 на блок-схеме, фиг. 4) приемник определяет местоположение, скорость и направление движения контролируемого объекта(блок 2, фиг. 4). Затем происходит сбор информации 3 22446 от бортовых датчиков и передача полученной информации для обработки и формирования посылки (блок 4, фиг. 4). После этого происходит формирование посылки, добавление служебной информации и запись информации в энергонезависимую память (блок 5, фиг. 4). В конце происходит отображение режимов работы,синхронизация, обработка запросов и команд из диспетчерского пункта (блок 8, фиг. 4). В любой момент времени может поступить запрос из диспетчерского пункта (блок 6, фиг. 4), на который происходит мгновенная отправка информации в диспетчерский пункт (блок 7, фиг. 4). После завершения очередного цикла обработки информации,программное обеспечение трехпроцессорного контроллера переходит в исходное состоянии и начинает выполнение очередной итерации цикла обработки и подготовки информации. Положительный эффект от использования предлагаемого комплекса, по сравнению с ближайшим аналогом, достигается за счет того, что бортовой комплекс способен работать автономно,полностью исключается одновременная передача информации от двух бортовых комплексов,исключаются взаимные помехи работы бортовых комплексов, осуществляется функция накопления информации с возможностью ее оперативного получения, а также бортовой комплекс способен работать в тяжелых климатических и производственных условиях,обеспечивается надежная работа от различных источников питания в условиях его нестабильности. Кроме того, такое выполнение бортового комплекса дает возможность использовать его в системе оперативного сбора данных о состоянии подвижных объектов, оперативного контроля и управления транспортными средствами. ФОРМУЛА ИЗОБРЕТЕНИЯ Бортовой комплекс для системы сбора данных о состоянии подвижных объектов, содержащий датчики технологического состояния транспортного средства, навигационную антенну с приемником,радиоантенну с усилителем,устройство отображения текстовой информации,отличающийся тем, что дополнительно введены трехпроцессорный контроллер с подключенными соответственно к первому, второму, третьему,четвертому и пятому входам-выходам трехпроцессорного контроллера блока согласования для сбора информации от системы , памяти энергонезависимой ММС, модуля индикации режимов работы, модуля согласования с системами верхнего уровня и стабилизированного источника питания, при этом шестой, седьмой, восьмой и девятый входы-выходы трехпроцессорного контроллера соединены соответственно с входамивыходами датчика технологического состояния транспортного средства, навигационной антенны с
МПК / Метки
МПК: G08G 1/123
Метки: подвижных, сбора, бортовой, комплекс, объектов, системы, данных, состоянии
Код ссылки
<a href="https://kz.patents.su/6-ip22446-bortovojj-kompleks-dlya-sistemy-sbora-dannyh-o-sostoyanii-podvizhnyh-obektov.html" rel="bookmark" title="База патентов Казахстана">Бортовой комплекс для системы сбора данных о состоянии подвижных объектов</a>
Бортовой комплекс для сбора данных о состоянии подвижных объектов
Номер предварительного патента: 16348
Опубликовано: 14.10.2005
Автор: Шабельников Евгений Алексеевич
МПК: G08G 1/123
Метки: сбора, состоянии, подвижных, данных, комплекс, бортовой, объектов
Формула / Реферат:
Изобретение относится к технике сопровождения и управления наземными транспортными средствами, в частности, к регистрации технологического транспорта путем автоматической передачи информации о местоположении и номере транспортной единицы, и может быть использовано в автоматизированных системах оперативного управлениягорнотранспортными процессами на карьерах.Бортовой комплекс для системы сбора данных осостоянии подвижных объектов содержит...
Датчик системы идентификации подвижных объектов
Номер полезной модели: 267
Опубликовано: 15.01.2007
Авторы: Салов Олег Владимирович, Федоров Вольдемар Георгиевич, Гундарев Владимир Александрович, Лазаренко Владимир Николаевич, Бальзанников Геннадий Александрович, Панов Алексей Владимирович, Кажибаев Айдар Сабыртаевич, Шулунов Алексей Николаевич
МПК: G01S 13/75
Метки: подвижных, идентификации, датчик, объектов, системы
Формула / Реферат:
Полезная модель относится к телеметрии, в частности к датчикам систем идентификации объектов -на расстоянии, а именно к «ответчикам», питаемым энергией от получаемых волн.Техническим результатом полезной модели является технологичный широкополосный датчик, пригодный для выпуска больших партий.Это достигается тем, что известный датчик системы идентификации подвижных объектов, содержащий антенну, выпрямляющее устройство, стабилизатор напряжения,...
Способ наблюдения за разрабатываемым месторождением полезного ископаемого (варианты), способ установки приборов под поверхностью земли, прибор для приема сейсмических данных, комплекс средств для сбора сейсмической информации, комплекс средств для установки приборов под поверхностью земли
Номер предварительного патента: 6425
Опубликовано: 15.07.1998
Авторы: Хэвиг, Свен О.
МПК: G01V 1/28
Метки: приборов, сбора, варианты, сейсмических, комплекс, прибор, данных, средств, ископаемого, приема, полезного, поверхностью, разрабатываемым, информации, месторождением, установки, способ, земли, наблюдения, сейсмической
Формула / Реферат:
Способ наблюдения за промышленным месторождением полезного ископаемого включает постоянную установку геофона в буровой скважине; генерирование первой серии сейсмических волн, получение первой серии сейсмических данных с помощью геофона, запись первой серии данных указанного приема первой серии сейсмических данных, генерирование второй серии сейсмических волн по прохождении достаточно большого промежутка времени для изменения состояния...
Система идентификации и поиска подвижных объектов
Номер предварительного патента: 10240
Опубликовано: 15.05.2001
Автор: Килибаев Бахитжан Саттарбекович
МПК: H04Q 7/08, G08B 13/18
Метки: поиска, система, подвижных, объектов, идентификации
Формула / Реферат:
Изобретение относится к системам радиопоиска и может быть использовано для поиска и обнаружения подвижных объектов и для установления контакта между определенными группами людей.Изобретение позволяет осуществить идентификацию и поиск подвижного объекта.Это достигается тем, что в известной системе, содержащей радиопередающую и радиоприемную станции, ключ идентификационного кода, установленные на подвижном объекте, согласно изобретению, система...
Система обработки баз данных
Номер предварительного патента: 4795
Опубликовано: 16.06.1997
Авторы: Васильев Иван Вениаминович, Проценко Владимир Александрович, Туякбаев Альтай Альшерович
МПК: H04L 12/66
Метки: баз, данных, система, обработки
Формула / Реферат:
Изобретение относится к области создания систем обработки информации, в том числе и баз данных.Система содержит объединенные в локальную вычислительную сеть коммуникационный сервер, локальные базы данных, новым является то, что в систему введены дополнительный шлюз с сетями передачи данных для получения информации из удаленных баз данных и сервер подготовки информации для передачи ее абонентам по высокоскоростным телевизионным каналам. Это...
Предыдущий патент: Автоматизированная система контроля и управления подвижными объектами
Следующий патент: Способ получения пленки CdTe из неводного электролита на основе этиленгликоля
Случайный патент: Накопитель твердых отходов