Средство датчиков для применения в буровой скважине (варианты)
Формула / Реферат
Средство датчиков содержит четыре одноосных датчика, каждый из которых может определять составляющую перемещения по соответствующей оси, имеющих соответствующую ориентацию и размещенных так, что углы между любыми двумя из упомянутых соответствующих ориентации упомянутых соответствующих осей являются по существу равными, причем одноосные датчики размещены так, что при использовании соответствующие оси находятся под по существу одинаковым углом к вертикали.
Текст
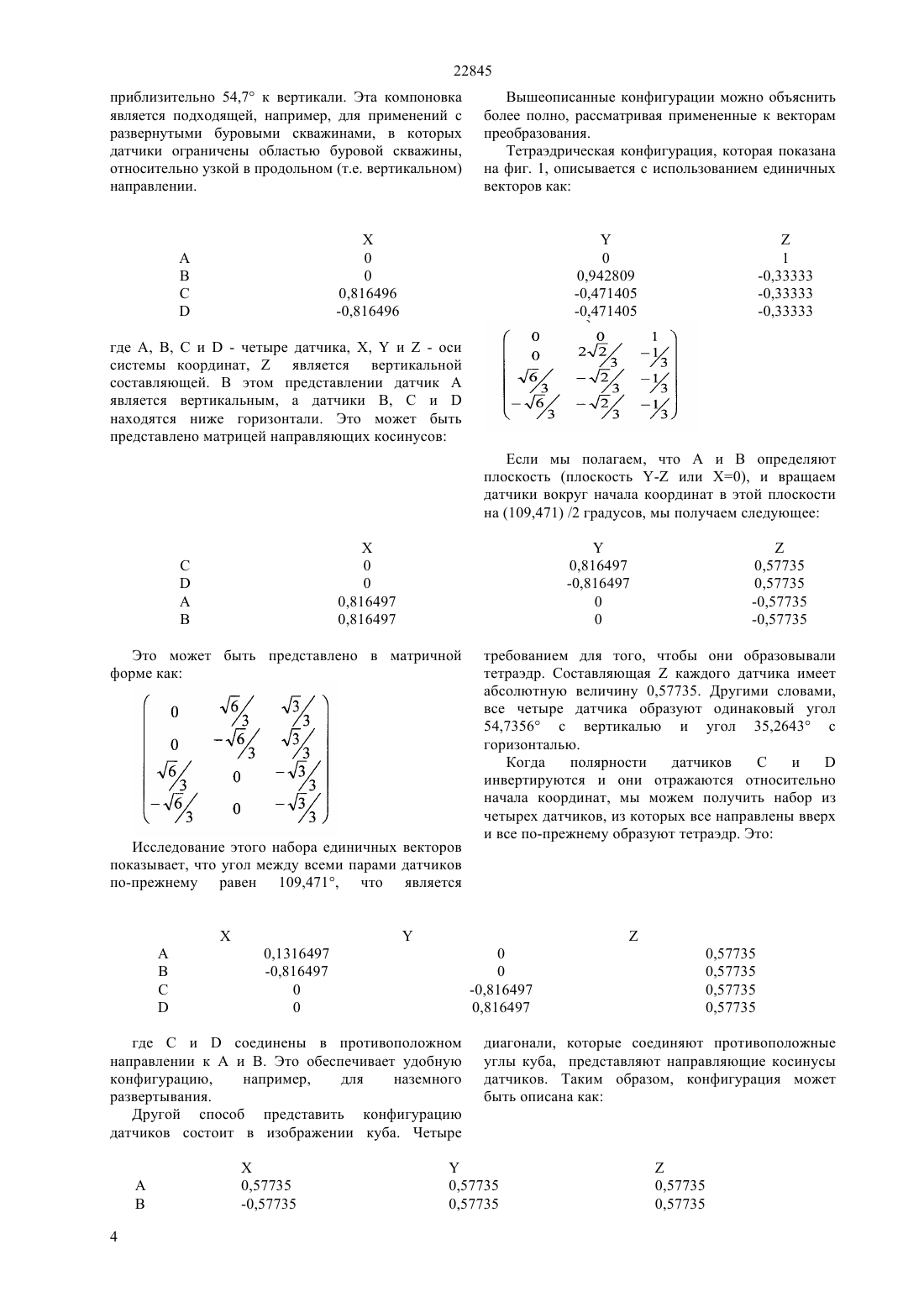
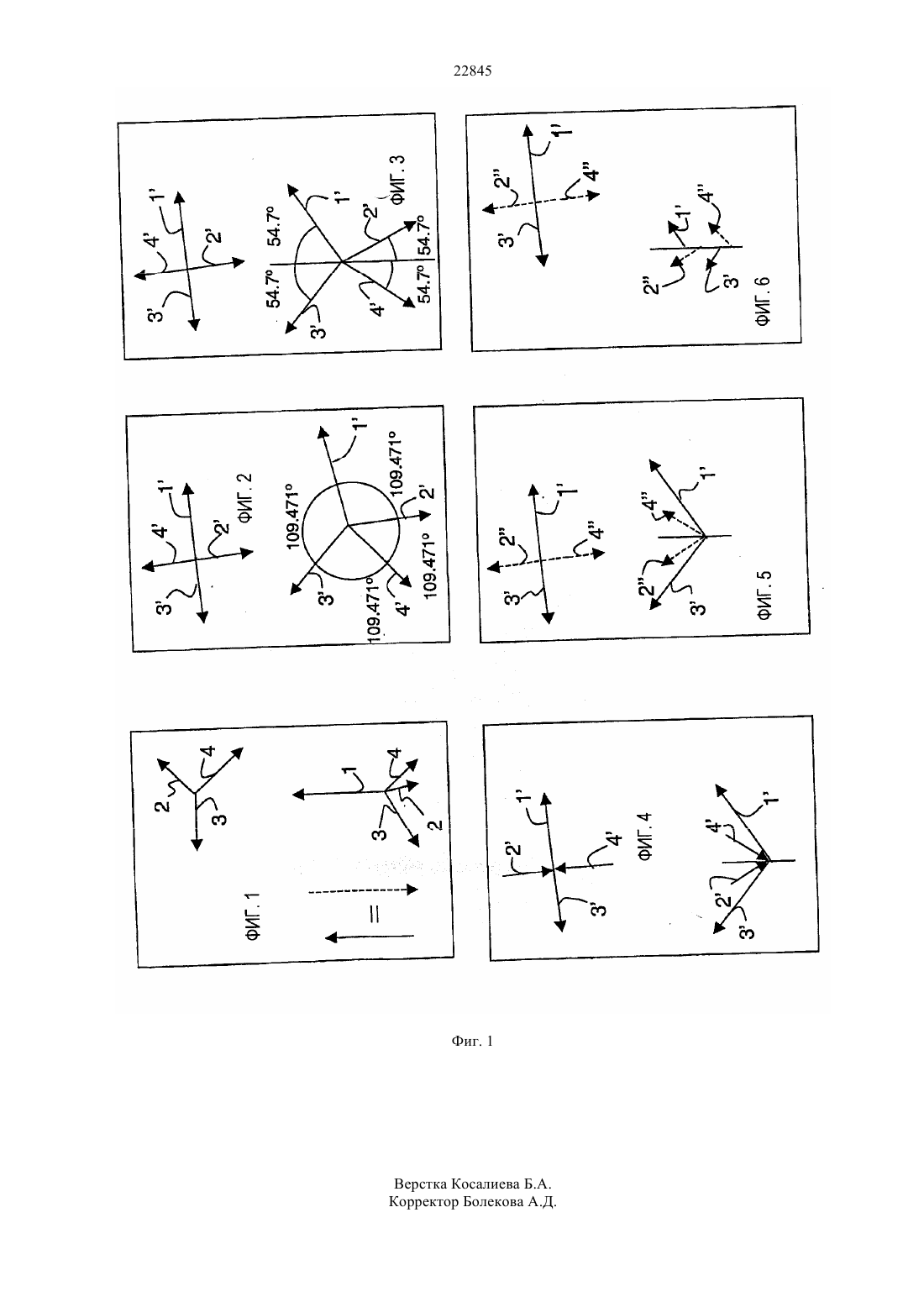
КОМИТЕТ ПО ПРАВАМ ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ МИНИСТЕРСТВА ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН(54) СРЕДСТВО ДАТЧИКОВ ДЛЯ ПРИМЕНЕНИЯ В БУРОВОЙ СКВАЖИНЕ(57) Средство датчиков содержит четыре одноосных датчика, каждый из которых может определять составляющую перемещения по соответствующей оси, имеющих соответствующую ориентацию и размещенных так, что углы между любыми двумя из упомянутых соответствующих ориентации упомянутых соответствующих осей являются по существу равными, причем одноосные датчики размещены так, что при использовании соответствующие оси находятся под по существу одинаковым углом к вертикали. 22845 Это изобретение имеет отношение к средствам датчиков. Средства датчиков, такие как средства датчиков для определения вибраций или перемещения, обычно используется во множестве применений. Например,такие средства датчиков используются для определения сейсмических или микросейсмических событий и могут быть размещены либо над поверхностью земли, либо под ней. Как правило,средства датчиков будут содержать совокупность одноосных датчиков, таких как геофоны, датчики ускорения или сейсмометры, которые могут воспринимать составляющие перемещения или вибрации только вдоль одной оси. Для определения полных трехмерных параметров вибрации события,необходимо использовать, по меньшей мере, три таких одноосных датчика, размещенных в непараллельной конфигурации так, чтобы могли быть получены составляющие вибрации в трех ортогональных направлениях. В конфигурации с тремя датчиками, например, в самом простом случае одноосные датчики могут быть выровнены по трем ортогональным направлениям, то есть по осям х, у идекартовой системы координат. Как упомянуто ранее, датчики не обязательно должны быть ортогональны, но должны быть хотя бы не параллельны,чтобы предусмотреть полное трехмерное разрешение. Однако этой ортогональной конфигурации датчиков свойственны практические недостатки. Одноосные датчики вибрации имеют тенденцию вести себя по-разному в зависимости от их ориентации, например, в результате эффекта гравитации. Поэтому на практике необходимо использовать датчик одного типа, выровненный вертикально (по оси ), и два датчика другого механического типа,которые выровнены горизонтально (по осям х и у). Требование использования двух разных типов датчиков причиняет неудобства, поскольку характеристики датчиков, например, чувствительность, могут отличаться для каждого типа и, таким образом, быть трудно соразмеряемыми. Кроме того, имеется больше расходов и более проблематично заменять датчики в случае неисправности. Эта проблема может быть решена с использованием другой конфигурации датчиков, в которой все три одноосных датчика расположены под одним и тем же углом к горизонтали (Гальперин,1984) при сохранении ортогональности. Поэтому конфигурация Гальперина позволяет использовать датчики одного типа для каждого из этих трех датчиков. Недавно было предложено использовать конфигурации с четырьмя датчиками. Они имеют несколько преимуществ перед системами с тремя датчиками, возможно, самое важное из них - это встроенная в систему избыточность, то есть если один из датчиков неисправен, то полное трехмерное разложение по-прежнему может быть получено на основе остальных трех действующих датчиков. Была предложена конфигурация Гальперина с четырьмя датчиками, которая содержит три обычных 2 датчика конфигурации Гальперина с дополнительным вертикально расположенным датчиком (Гальперин, 1984 и Морозов и другие,1997). Здесь углы между датчиками не являются равными, некоторые из пар датчиков ортогональны, а некоторые нет. Этой конфигурации, очевидно,присущ недостаток, заключающийся в том, что для четвертого вертикального датчика должен использоваться датчик другого типа. Альтернативная конфигурация с четырьмя датчиками, которая была предложена, известна как тетраэдрическая конфигурация. В этом случае датчики размещены вдоль четырех векторов, которые соединяют центр правильного тетраэдра с каждой из его четырех вершин. В этой конфигурации все углы между датчиками равны и составляют 109, 471 между осями любых двух датчиков, при этом нет ортогональности. Такая компоновка описана,например,в международной публикации 02/068996. Эта конфигурация имеет преимущество в том, что датчики могут быть легко проверены, поскольку суммарный выходной сигнал датчиков должен равняться нулю, если все датчики функционируют правильно. Это свойство возникает в результате тетраэдрической геометрии датчиков. Однако снова эта компоновка имеет недостаток в том, что придется использовать разные типы датчиков в зависимости от угла каждого датчика к вертикали. Наиболее близким аналогом настоящего изобретения является средство датчиков для использования в буровой скважине, описанное в патенте 2275337, которое содержит четыре одноосных датчика, каждый из которых выполнен с возможностью определения составляющей перемещения /вибрации по соответствующей оси,имеющих соответствующие ориентации и размещенных так, что углы между двумя любыми из упомянутых соответствующих осей являются по существу равными. Задача настоящего изобретения состоит в обеспечении конфигурации с четырьмя датчиками,которая имеет преимущества тетраэдрической конфигурации без необходимости в разных типах датчиков. В соответствии с первым аспектом настоящего изобретения обеспечивается средство датчиков,содержащее четыре одноосных датчика, каждый из которых может определять составляющую перемещения по соответствующей оси, имеющих соответствующую ориентацию и расположенных так,что углы между любыми двумя из упомянутых соответствующих ориентации упомянутых соответствующих осей являются существенно равными, причем одноосные датчики размещены так,что при использовании соответствующие оси находятся под существенно одинаковым углом к вертикали. В соответствии со вторым аспектом настоящего изобретения обеспечивается средство датчиков для определения вибрации для определения составляющих вибрации в трех ортогональных направлениях, содержащее четыре одноосных 22845 датчика, каждый из которых выполнен с возможностью определения составляющей вибрации по соответствующей оси,имеющих соответствующую ориентацию и расположенных в такой конфигурации, что углы между любыми двумя из упомянутых соответствующих ориентации упомянутых соответствующих осей являются по существу равными, причем одноосные датчики размещены так,что при использовании соответствующие оси находятся под по существу одинаковым углом к вертикали. Каждая соответствующая ось может быть по существу под углом 54,74 к вертикали. Одноосные датчики могут иметь соответствующие векторы направления,ориентированные вдоль соответствующих осей,направление векторов определяется полярностями соответствующих одноосных датчиков. В этом случае полярности одноосных датчиков могут быть размещены так, что векторы направления всех одноосных датчиков имеют положительные составляющие в вертикальном направлении. Альтернативно полярности одноосных датчиков могут быть размещены так, что векторы направления всех одноосных датчиков имеют отрицательные составляющие в вертикальном направлении. Предпочтительно одноосные датчики расположены вдоль общей оси. В этом случае, общая ось может лежать в вертикальном направлении. Одноосные датчики могут, например, содержать геофоны, сейсмометры или датчики ускорения. В соответствии с третьим аспектом настоящего изобретения обеспечивается такое средство датчиков для использования в буровой скважине. Теперь посредством примера будет описано изобретение со ссылкой на сопроводительные чертежи, на которых Фиг. 1 показывает в векторной форме известную из уровня техники тетраэдрическую конфигурацию датчиков Фиг. 2 показывает тетраэдрическую конфигурацию датчиков в соответствии с настоящим изобретением Фиг. 3 показывает конфигурацию,представленную на фиг. 2, в двухмерной форме Фиг. 4 показывает компактную версию конфигурации, представленной на фиг. 2 Фиг. 5 показывает эквивалентную конфигурацию для конфигурации, представленной на фиг. 4 и Фиг. 6 показывает практическую конфигурацию,основанную на конфигурации, представленной на фиг. 5. На каждой из фигур верхняя диаграмма показывает вид комплекта датчиков сверху, в то время как нижняя диаграмма показывает вид сбоку. На фигурах плоскость - параллельна листу бумаги,осьнаправлена вверх, осьпроходит слева направо и осьперпендикулярна плоскости листа бумаги. Фиг. 1 показывает известную из уровня техники тетраэдрическую конфигурацию датчиков. Каждый датчик обозначен вектором, стрелка вектора обозначает полярность датчика. Вращение датчика на 180 изменяет знак его выходных данных. Кроме того, диаграмма в нижнем левом углу фиг.1 показывает, что в фигурах пунктирная стрелка обозначает датчик, который имеет обратную полярность, то есть датчик, который был соединен наоборот. Другими словами, обычный датчик эквивалентен датчику с обратной полярностью,повернутому на 180. Конфигурация, представленная на фиг. 1, имеет вертикальный датчик 1 с датчиком 2 ниже горизонтали в плоскости Х 0 и два других датчика 3, 4 ниже горизонтали. Хотя трудно показать на фигуре, каждый вектор имеет одну и ту же абсолютную величину, и каждая пара векторов находится под одним и тем же углом друг другу приблизительно 109, 471. Фиг. 2 показывает конфигурацию, аналогичную конфигурации, представленной на фиг. 1, но здесь датчики повернуты примерно на 54,7 вокруг оси . Это образует конфигурацию в соответствии с настоящим изобретением. Теперь на виде сверху можно видеть,что датчики кажутся перпендикулярными, но лишь в проекции. При таком расположении все датчики образуют по существу одинаковый угол приблизительно 54,7 с вертикалью. Это более ясно показано на фиг. 3. Понятно, что все датчики также образуют одинаковый угол с горизонталью приблизительно 35,3. Фиг. 4 показывает конфигурацию, эквивалентную конфигурациям, представленным на фиг.2 и 3, но в более компактной форме. Это достигнуто посредством сдвига двух нижних датчиков 2, 4 на фиг. 3 вдоль их собственных осей. В этой конфигурации соответствующие оси каждой пары датчиков по-прежнему находятся под одинаковым углом приблизительно 109,471, в то время как каждая соответствующая ось по-прежнему находится под углом приблизительно 54,7 к вертикали. Эта конфигурация имеет недостаток в том, что может быть трудно физически соединить все датчики. Фиг. 5 показывает модифицированную версию конфигурации, представленной на фиг. 4, в которой датчики 2 и 4 развернуты и изменена их полярность,как обозначено пунктирными стрелками 2, 4. Все векторы датчиков теперь имеют положительные составляющие в вертикальном направлении. Конечно, было бы в равной степени возможно развернуть другие датчики 1 и 3, чтобы выбрать такую конфигурацию, чтобы все векторы датчиков имели отрицательные составляющие в вертикальном направлении, то есть, чтобы они все были направлены вниз. В этих конфигурациях физическая связь упрощена, поскольку теперь все датчики направлены наружу. Фиг. 6 показывает модифицированную версию конфигурации,представленной на фиг. 5,подходящей для некоторых практических применений. Здесь эти четыре датчика перемещены так, чтобы они были расположены вдоль общей оси,которая в этом случае совпадает с вертикальной осью, по-прежнему сохраняя их первоначальные ориентации. Это означает, что ориентации каждой пары датчиков по-прежнему находятся под углом приблизительно 109,471 и под углом 3 22845 приблизительно 54,7 к вертикали. Эта компоновка является подходящей, например, для применений с развернутыми буровыми скважинами, в которых датчики ограничены областью буровой скважины,относительно узкой в продольном (т.е. вертикальном) направлении. Вышеописанные конфигурации можно объяснить более полно, рассматривая примененные к векторам преобразования. Тетраэдрическая конфигурация, которая показана на фиг. 1, описывается с использованием единичных векторов как где А, В, С и- четыре датчика, ,и- оси системы координат,является вертикальной составляющей. В этом представлении датчик А является вертикальным, а датчики В, С инаходятся ниже горизонтали. Это может быть представлено матрицей направляющих косинусов Если мы полагаем, что А и В определяют плоскость (плоскость - или Х 0), и вращаем датчики вокруг начала координат в этой плоскости на (109,471) /2 градусов, мы получаем следующее Это может быть представлено в матричной форме как Исследование этого набора единичных векторов показывает, что угол между всеми парами датчиков по-прежнему равен 109,471, что является требованием для того, чтобы они образовывали тетраэдр. Составляющаякаждого датчика имеет абсолютную величину 0,57735. Другими словами,все четыре датчика образуют одинаковый угол 54,7356 с вертикалью и угол 35,2643 с горизонталью. Когда полярности датчиков С и инвертируются и они отражаются относительно начала координат, мы можем получить набор из четырех датчиков, из которых все направлены вверх и все по-прежнему образуют тетраэдр. Это где С исоединены в противоположном направлении к А и В. Это обеспечивает удобную конфигурацию,например,для наземного развертывания. Другой способ представить конфигурацию датчиков состоит в изображении куба. Четыре А В диагонали, которые соединяют противоположные углы куба, представляют направляющие косинусы датчиков. Таким образом, конфигурация может быть описана как где снова инвертирована полярность двух датчиков, в этом случае либо датчиков А и , либо датчиков В и С. Этот способ рассмотрения конфигурации подчеркивает факт, что все направляющие косинусы имеют одинаковую абсолютную величину, и, таким образом,обеспечение желаемой конфигурации датчиков является лишь вопросом изменения их знаков. Изобретение может использоваться для различных применений, например, наземного развертывания геофонов, датчиков ускорения и сейсмометров, где ориентация относительно вертикали обычно известна, и для систем сейсмометров, установленных на дне океана . Донный кабель (ОВС) на карданном подвесе и системы буровых скважин также могут использовать эту геометрию датчиков. Ориентация также имеет преимущество для скважинных геофонов, когда на каждом конце геофона имеется один соединитель, например, у геофона -45 производства - . Это справедливо потому, что все соединители легко доступны, если геофоны установлены таким наклонным способом относительно оси буровой скважины. Дело обстоит иначе, если один датчик установлен параллельно с буровой скважиной, что является традиционным способом установки датчиков. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Средство датчиков, содержащее четыре одноосных датчика, каждый из которых выполнен с возможностью определения составляющей перемещения по соответствующей оси, имеющих соответствующую ориентацию и размещенных так,что углы между любыми двумя из упомянутых соответствующих осей являются по существу равными, отличающееся тем, что одноосные датчики размещены так, что при использовании соответствующих осей находятся под по существу одинаковым углом к вертикали. 2. Средство датчиков для определения вибрации для определения составляющих вибрации в трех ортогональных направлениях, содержащее четыре одноосных датчика, каждый из которых выполнен с возможностью определения составляющей вибрации вдоль соответствующей оси, имеющих соответствующую ориентацию и размещенных в такой конфигурации, что углы между любыми двумя из упомянутых соответствующих ориентации упомянутых соответствующих являются существу равными, отличающееся тем, что одноосные датчики, размещены так, что при использовании соответствующие оси находятся под по существу одинаковым углом к вертикали. 3. Средство датчиков по любому из пп. 1 и 2,отличающееся тем, что каждая соответствующая ось находится по существу под углом 54, 74 к вертикали. 4. Средство датчиков по любому из предыдущих пунктов, отличающееся тем, что одноосные датчики имеют соответствующие векторы направления,ориентированные по соответствующим осям, при этом направления векторов определены полярностями соответствующих одноосных датчиков. 5. Средство датчиков по п. 4, отличающееся тем, что полярности одноосных датчиков обеспечены так, что векторы направления всех одноосных датчиков имеют положительные составляющие в вертикальном направлении. 6. Средство датчиков по любому из пп. 1-4,отличающееся тем, что полярности одноосных датчиков обеспечены так, что векторы направления всех одноосных датчиков имеют отрицательные составляющие в вертикальном направлении. 7. Средство датчиков по любому из предыдущих пунктов, отличающееся тем, что одноосные датчики расположены вдоль общей оси. 8. Средство датчиков по п. 7, отличающееся тем, что при использовании общая ось находится в вертикальном направлении. 9. Средство датчиков по любому предыдущему пункту, отличающееся тем, что одноосные датчики содержат геофоны. 10. Средство датчиков по любому из пп. 1-8,отличающееся тем, что одноосные датчики содержат сейсмометры. 11. Средство датчиков по любому из пп. 1-8,отличающееся тем, что одноосные датчики содержат датчики ускорения. 12. Средство датчиков по любому предыдущему пункту, предназначенное для использования в буровой скважине.
МПК / Метки
МПК: G01V 1/16
Метки: буровой, варианты, средство, скважине, датчиков, применения
Код ссылки
<a href="https://kz.patents.su/6-22845-sredstvo-datchikov-dlya-primeneniya-v-burovojj-skvazhine-varianty.html" rel="bookmark" title="База патентов Казахстана">Средство датчиков для применения в буровой скважине (варианты)</a>
Сегмент опорного элемента датчиков устройства скребкового типа, опорный элемент датчиков и устройство скребкового типа
Номер предварительного патента: 16862
Опубликовано: 16.01.2006
Авторы: РИХТЕР, Томас, ШВАРЦ, Аксел, ВАЙТ, Кристиан
МПК: F16L 55/26
Метки: скребкового, типа, опорного, элемента, устройство, элемент, датчиков, устройства, опорный, сегмент
Формула / Реферат:
Изобретение относится к сегментам опорного элемента датчиков для устройства скребкового типа, состоящий по меньшей мере из двух пар преимущественно параллельных подвижных блоков, расположенных друг за другом. Между, по меньшей мере, одной парой подвижных блоков расположена опорная плита для датчиков. Сегмент может сочетаться с другими сегментами, образуя опорный элемент датчиков, отличающийся высокой эксплуатационной и функциональной надежностью...
Носитель датчиков для внутритрубного инспекционного снаряда (варианты)
Номер патента: 14832
Опубликовано: 15.07.2008
Авторы: Елисеев Владимир Николаевич, Козырев Борис Владимирович, Чернов Дмитрий Германович, Матвеев Михаил Семенович, Сапельников Юрий Анатольевич
МПК: F17D 5/06
Метки: датчиков, носитель, внутритрубного, варианты, инспекционного, снаряда
Формула / Реферат:
Заявленный носитель для внутритрубного инспекционного снаряда, имеющийнесколько вариантов исполнения, с посадочными местами для контрольных датчиков,чувствительных к каким-либо диагностическим параметрам трубопровода, характеризуетсятем, что носитель включает в себя множество кинематически соединённых междусобой держателей датчиков, способных испытывать упругое отжатие в радиальномнаправлении от оси носителя, держатели выполнены в виде...
Днк (варианты), полипептид (варианты), слитый полипептид, рекомбинантная днк, конструкт рекомбинантной днк, клетка, способ отбора соединений и соединение, композиция для применения в сельском хозяйстве, композиция для применения в фармации, способ получения белка, пептида или полипептида
Номер патента: 8415
Опубликовано: 15.05.2002
Авторы: ДЖЕПСОН, Ян, ГРИНЛЕНД, Эндрю, Джеймс, МАРТИНЕЗ, Альберто
МПК: C07K 14/435, C07K 14/72, A61K 38/16...
Метки: полипептид, рекомбинантной, варианты, белка, слитый, хозяйстве, днк, соединение, фармации, сельском, соединений, способ, полипептида, композиция, клетка, применения, отбора, пептида, получения, конструкт, рекомбинантная
Формула / Реферат:
Изобретение относится к стероидному рецепторному белку насекомого, который способен действовать в качестве гена-переключателя, чувствительного к химическому индуктору, запускающему внешний контроль данного гена.
Носитель датчиков для внутритрубного инспекционного снаряда (варианты)
Номер полезной модели: 186
Опубликовано: 15.07.2005
Авторы: Чернов Дмитрий Германович, Лисковский Александр Викторович, Матвеев Михаил Семенович, Козырев Борис Владимирович, Сапельников Юрий Анатольевич, Елисеев Владимир Николаевич, Тарасов Валерий Алексеевич
МПК: G01N 27/72, F17D 5/00, G01B 5/28...
Метки: варианты, внутритрубного, датчиков, носитель, инспекционного, снаряда
Формула / Реферат:
Полезная модель относится к устройствам, используемым для внутритрубного обследования трубопроводов.Техническим результатом является возможность повысить достоверность прогнозирования работоспособности трубопровода по результатам внутритрубной инспекции трубопроводов, имеющих дефекты геометрии различных типов в сечении, а также состоящих из труб с различной толщиной стенки и имеющих отремонтированные участки трубопроводов, уменьшить благодаря...
Полипептид, лекарственное средство, способ получения полипептида (варианты), фрагмент ДНК (варианты), экспрессирующий вектор (варианты), штамм E.coli (варианты), фармацевтическая композиция (варианты)
Номер патента: 13088
Опубликовано: 15.05.2003
Автор: Антонио Сирна
МПК: A61K 35/22, C07K 14/47, C12N 1/21...
Метки: штамм, экспрессирующий, средство, получения, вектор, фрагмент, лекарственное, способ, днк, e.coli, полипептида, композиция, фармацевтическая, варианты, полипептид
Формула / Реферат:
Описан новый белок, полученный из мочи путемэкстракции и очистки с помощью ионообменнойхроматографии и высокоразрешающейхроматографии.
Предыдущий патент: Ленточно-колодочный тормоз лебедки буровой установки
Следующий патент: Цилиндрический накопитель информации
Случайный патент: Инвертирующий усилитель