Махолет
Формула / Реферат
Изобретение относится к летательным аппаратам тяжелее воздуха с использованием маховых колебательных движений крыльев относительно центра тяжести аппарата в окружающей среде.
Махолет для полета в воздухе состоит из авторотирующих несущих плоскостей и подвесной системы для пилота с полезным грузом на крестовине с тремя степенями свободы, которая присоединена к вертикальной оси вращения несущих плоскостей, что обеспечивает вертикальные колебания несущих плоскостей относительно пилота с грузом и тем самым маховые движения авторотирующих несущих плоскостей, связанных автоматом перекоса с пружиной, позволяющей автоматически менять углы установки несущих плоскостей. Управление махолетом осуществляется ручкой, которая позволяет смещать по горизонтали центры подъемной силы и подрессоренной массы пилота с грузом.
Текст
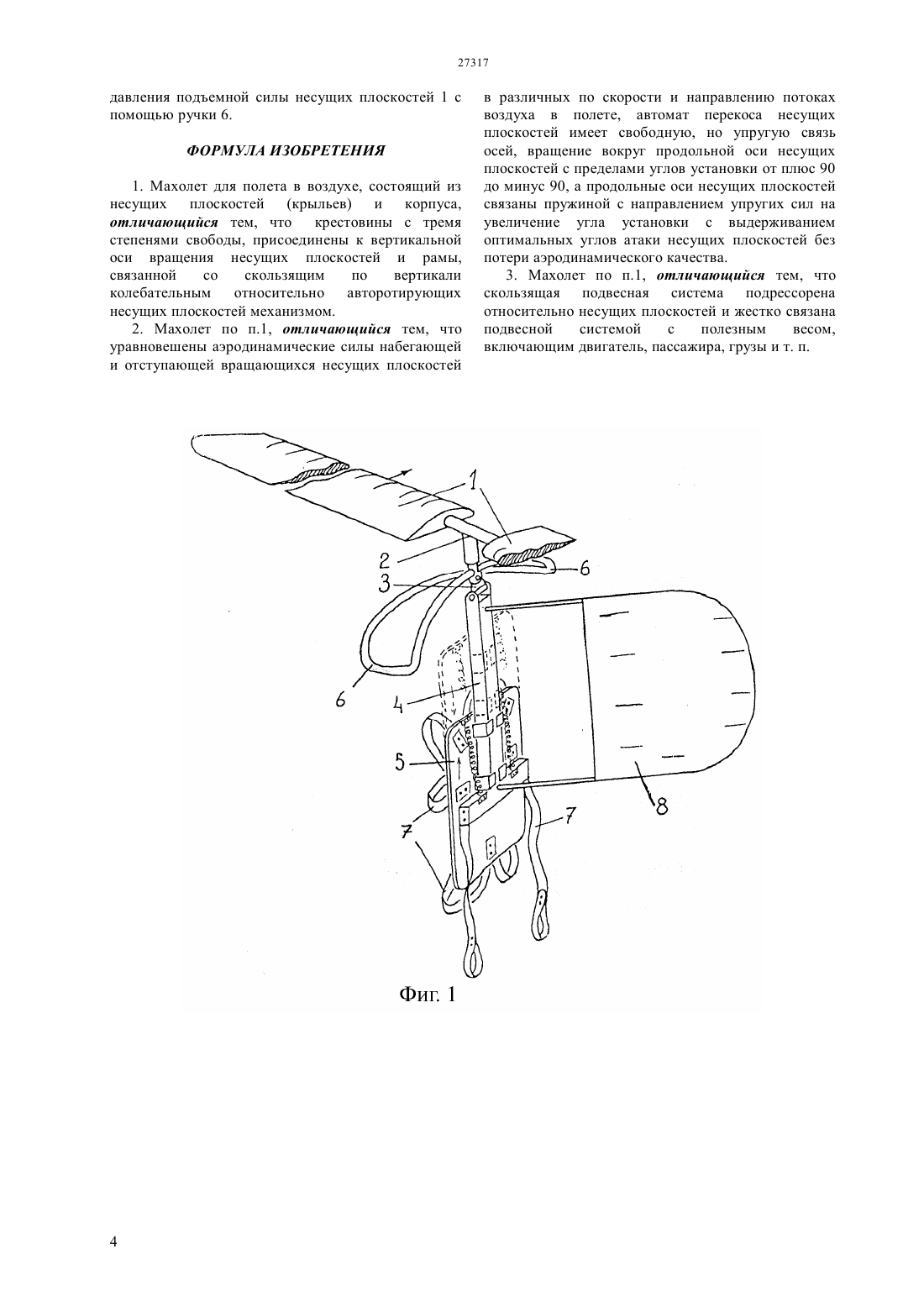
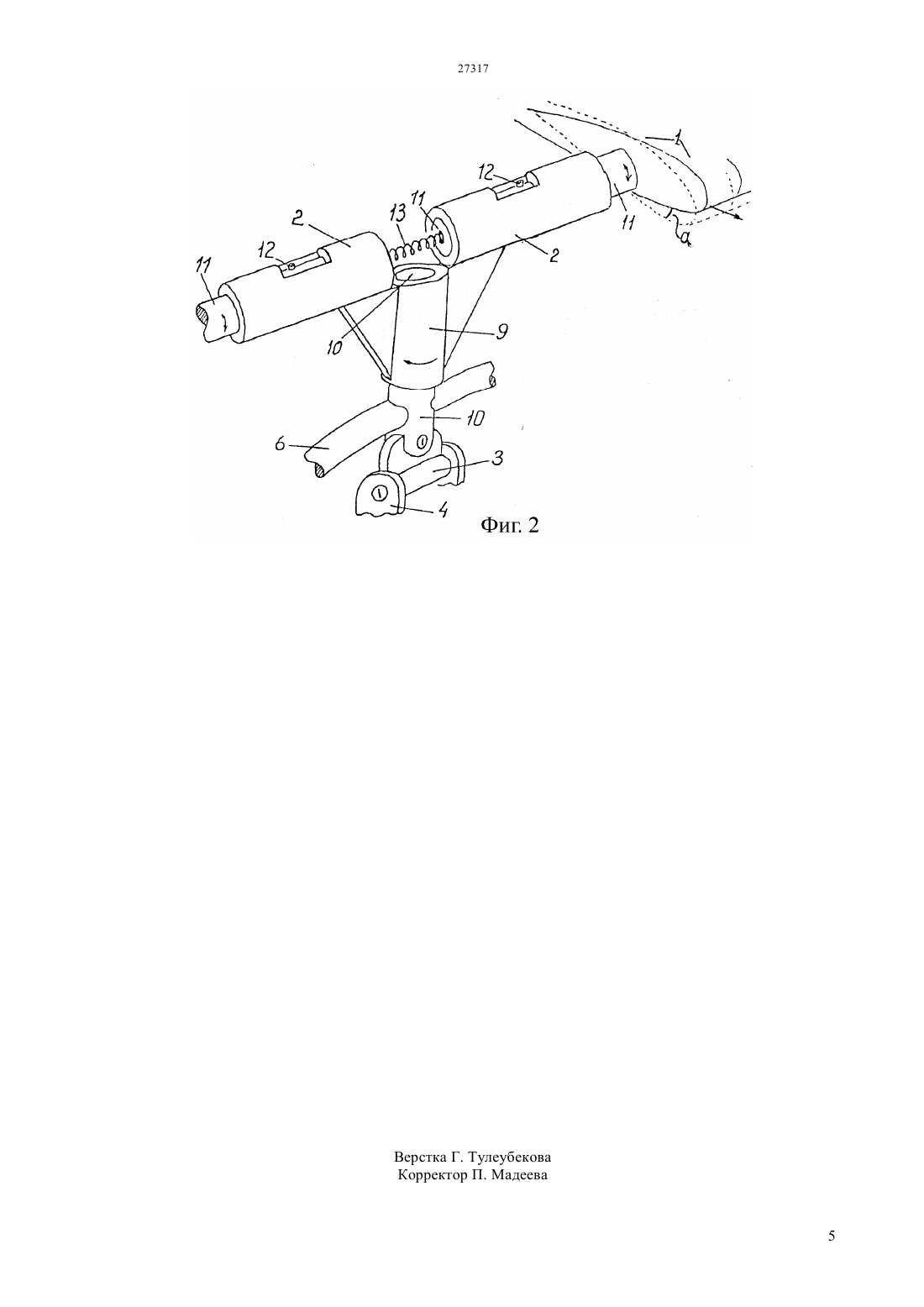
(51) 64 33/02 (2006.01) 64 27/00 (2006.01) КОМИТЕТ ПО ПРАВАМ ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ МИНИСТЕРСТВА ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ИННОВАЦИОННОМУ ПАТЕНТУ Махолет для полета в воздухе состоит из авторотирующих несущих плоскостей и подвесной системы для пилота с полезным грузом на крестовине с тремя степенями свободы, которая присоединена к вертикальной оси вращения несущих плоскостей,что обеспечивает вертикальные колебания несущих плоскостей относительно пилота с грузом и тем самым маховые движения авторотирующих несущих плоскостей,связанных автоматом перекоса с пружиной,позволяющей автоматически менять углы установки несущих плоскостей. Управление махолетом осуществляется ручкой, которая позволяет смещать по горизонтали центры подъемной силы и подрессоренной массы пилота с грузом.(73) Республиканское государственное предприятие на праве хозяйственного ведения Казахский национальный технический университет им. К.И. Сатпаева Министерства образования и науки Республики Казахстан(57) Изобретение относится к летательным аппаратам тяжелее воздуха с использованием маховых колебательных движений крыльев относительно центра тяжести аппарата в окружающей среде. Изобретение относится к летательным аппаратам тяжелее воздуха с использованием маховых колебательных движений крыльев относительно центра тяжести аппарата в окружающей среде. Махолет предназначен для вертикального и горизонтального полета в соответственном исполнении, как с помощью мускульной энергии человека-пилота, так и двигателя. Изобретение может быть использовано в целях переброски по воздуху пассажиров и грузов пилотируемом и беспилотном выполнении, или управляемым дистанционно, например, по радио. Изобретение может быть использовано также в спорте, геолого разведочных и других изыскательных работах,переброски в труднодоступные районы грузов и пассажиров с преодолением водных, лесных преград, пересеченной местности и выброски воздушных десантов, в широких пределах различных видов транспорта как не требующее особой летной подготовки,и еще как экспериментальное устройство для дальнейшего изучения мускульного машущего полета. В настоящее время известны конструкции махолетов орнитоптерного типа (птицелеты),осуществляющие попытки полета путем машущепоступательного движения обоих крыльев и всего аппарата. Например, махолет Ф. Маковичка(МКИ В 64 В 31/02 ЧССР патент от 1939 года),упомянутый в последнее время в печати (Вокруг света, 1974, 2, стр.63). У этого махолета оба крыла по всему размаху совершают колебательные движения - симметричные взмахи относительно друг друга и воздуха. Автор предполагает, что аппарат будет перемещаться в воздухе в направлении полета посредством маховых колебательных движений несущих плоскостей как летающие птицы и насекомые. Недостатками упомянутого махолета и других подобных,предлагаемых в печати махолетов, являются- отсутствие исследования и испытания летных качеств аппарата даже без фактического полета в воздухе, т. е. без отрыва от земной поверхности или испытательного стенда полет без создания определенной предварительной поступательной скорости движения или наличия определенной безопасной высоты реального полета- нет специальной тяговой или рычажной системы управления в полете несущими плоскостями- отсутствие привода от моторного или мускульного двигателя крыльев- должна быть строго установлена частота взмахов крыльев- нет возможности держать тело пилота в удобном положении и для уменьшения лобового сопротивления- сложность конструкции для отдельного выполнения обоих симметричных крыльев, т.е. правого и левого. Известен машущий движитель Червякова Б.К.(Патент РФ 2089461 МКИ В 64 С 33/02. От 10.09.97), где кисти подвижных несущих лопастей 2 выполнены в виде поворотной втулки,установленной на стержне, соединенном двумя шарнирами с парой рычагов, образующих предплечье движителя. На стержне предплечья расположены рычаги, а плоскости вращения кривошипов и качания коромысла перпендикулярны плоскости, образованной рычагами плеч и предплечья, к которым крепятся лопасти или машущие крылья. Недостатком этого махолета является отсутствие способности летать. Наиболее близким к предлагаемому махолету является изобретение СССР 487808, МКИ В 64 С 33/02, от 15.10 75, авторы Селивановы Н.П. и В.Н. Привод крыла орнитоптера. Здесь упрощена конструкция, где колено вала выполнено виде спрямленного участка цилиндрической спирали, а ось крыла соединена с коленом вала через кардан с возможностью вдоль сферической опоры,закрепленной на корпусе махолета. Такая конструкция использована во французской заводной игрушке, величиной жаворонка с крыльями упругими и гибкими, как перья птиц и перепонки крыланов. Недостатком прототипа является сложность крепления осей крыльев, приводов для маховых качаний их и отсутствие механики управления полетом с размещением пилота (пассажиров). Предлагаемое изобретение дает возможность мускульного машущего полета в течение продолжительного времени с подъемом на высоту без приобретения начальной поступательной скорости движения и мобильного управления махолетом с безопасной посадкой. Надежность конструкции позволяет выполнять в полете фигуры высшего пилотажа при спортивных мероприятиях. Цель достигается путем использования авторотации несущих плоскостей, которые создают подъемную силу, как аэродинамическая опора для последующего прыжка на высоту,соответствующую количеству затраченной энергии мускульной силы пилота или двигателя. Авторотирующие несущие плоскости подтягиваются на достигнутую корпусом высоту в результате прыжка или толчка вверх. В этот момент автоматически изменяется угол установки несущих плоскостей,чем и устраняется излишнее сопротивление при переходе на набранную высоту без потери подъемной силы. Движение плоскостей совпадает с одним из способов работы крыльев птиц. При махе вниз на несущих плоскостях возникают две силы - подъемная и тянущая вперед,т.е. авторотирующая сила. При махе вверх не теряется подъемная сила, а возникает тормозящая вращению сила, т.е. останавливающая вращение несущих плоскостей /М.К. Тихонравов. - Полет птиц и машин с машущими крыльями. Москва. Оборонгиз.1949/. Однако, при энергичном подъеме данного махолета устраняется сила торможения,возникающая за счет сохранения подъемной силы. Предлагаемый махолет избавлен от потерь оборотов в авторотирующем режиме полета, ибо вращение несущих плоскостей не замедляется для последующего махового цикла. Сущность изобретения поясняется фигурами 1 и 2, на которых показана принципиальное устройство махолета,основного автомата перекоса с креплением к нему несущих плоскостей для сходства механики движений крыла птицы и несущей плоскости предлагаемого махолета. На фиг.1 изображен общий схематический вид махолета в масштабе соответствия со средним ростом человека. Высота аппарата почти соответствует высоте пилота(на чертеже приблизительный масштаб 120). На фиг.2 схема опорного Т-образного автомата перекоса несущих плоскостей и подвесной системы на шарнире с двумя степенями свободы. Показан продольный автомат перекоса с двумя вырезами для ограничения перекоса и пружиной между осями несущих плоскостей. Основными элементами устройства махолета являются несущие плоскости,свободно вращающиеся в автомате перекоса, к которому крепится на оси подвесная система, что показано на фиг.1. Несущие плоскости 1 соединены между собой автоматом перекоса 2, к которому крепится свободно вращающийся на вертикальной оси шарнир 3. Подвесная система состоит из рейки 4 со скользящей по ней рамой 5 для крепления к спине пилота ремнями 7 всего махолета. На вертикальной оси 9 автомата перекоса 2 в верхней части шарнира 3 расположена поперечная дугообразная ручка 6 для управления полетом. В нижней части рейки 4 крепятся ремни-стремянки 7, относящиеся к подвесной системе для создания колебательных движений ногами. Сзади к рейке 4, реже к ручке 6 жестко крепятся кили 8 -стабилизаторы направления движения. На фиг.2 автомат перекоса 2 состоит из трех Т-образно расположенных и жестко скрепленных между собой втулок 9. В вертикальной втулке 9 вращается ось 10, к которой через шарнир 3 крепится рейка 4 для соединения со всей подвесной системой. Остальные горизонтальные втулки 2 держат оси 11 от несущих плоскостей 1. Оси 11 имеют пределы вращения под углами установки а от 90 до - 90 благодаря упругим ограничителям 12,которые контролируют минимальные и максимальные углы установки несущих плоскостей 1. Оси 11 связаны пружиной 13 с напряжением кручения, стремящимся увеличить углы установки несущих плоскостей 1. Геометрия поверхности движения несущих плоскостей 1 махолета и крыла птицы совпадает, если произвести развертку поверхностей с учетом выпрямления по поступательному направлению корневой и концевой частей несущих плоскостей. Махолет работает следующим образом. Для раскручивания несущих плоскостей 1 пилот,закрепленный к подвесной системе, начинает за ручку 6 и с помощью нижних ремней-стремянок 7 раскачивать махолет вертикально. В результате авторотирующего эффекта несущие плоскости 1,меняя углы установки а в пределах ограничителей 12, раскручиваются авторотацией вокруг оси 10. Пружина 13 постоянно стремится увеличить угол установки несущей плоскости 1 до максимума, что при восходящем движении махолета не создает сопротивления увеличению оборотов несущих плоскостей 1. Почувствовав увеличение подъемной силы авторотирующих несущих плоскостей 1,достаточной для зависания махолета, пилот отталкивается от взлетного места ногами и приступает прыжками с махолетом набирать высоту. Ноги пилота в нижних ремнях-стремянках 7 в полете раскачивают вертикально махолет посредством скользящей рейки 4 по раме 5, т.к. соотношение масс махолета и пилота с полезным грузом по Ньютону не более 110. Например,38 кг/80 кг амплитуда колебаний будет обратной зависимости. При махе вниз значительно увеличивается нагрузка на несущие плоскости 1, что увеличивает обороты авторотации и тем самым возрастает подъемная сила на ометаемой поверхности. При махе вверх нагрузка на несущие плоскости 1 частично или полностью снимается благодаря свободному падению пилота по скользящей рейке 4, и махолет скачком или плавно переходит на более высокий уровень полета. Амплитуда скачка зависит от выделенной пилотом энергии. В процессе полета несущие плоскости 1 работают в режиме машущего крыла. Поверхность механики движения несущей плоскости махолета может быть развернута с выпрямлением корневой и концевой частей. В этом случае поверхность полностью совмещается с принципиальной поверхностью скольжения машущего крыла птицы,не исключая любой режим полета. Математическая поверхность в том и в другом случае остается неизменной, меняются только координаты с круговой на линейную. Поступательное движение вперед и повороты достигаются смещением центра давления и центра тяжести от вертикальной линии отвеса с помощью ручки 6, связанной с крестовиной 3 через подвесную систему, т.е. рейку 4, включая пилота в ремнях 7. Природа птиц и насекомых,несомненно, воспользовалась бы механикой этого махолета. Однако, биологические законы не позволяют живому существу бесконечно вращать одну часть организма (крыло) относительно другой(туловища) без отделения их и гибели его. Исключением являются крылатые семена растений и некоторые виды планктона Предлагаемое изобретение может быть использовано не только в спортивных целях, но и замены вертолетов, что часто обуславливает путаницу предлагаемого махолета с вертолетами. Современные вертолеты при использовании машущих авторотирующих плоскостей 1 и автомата перекоса 2 будут значительно меньше потреблять мощности двигателей. Автомат перекоса,изменяющий углы установки а несущих плоскостей 1 и осевая крестовина 3 с двумя степенями свободы могут заменить приводы перекоса лопастей вертолетов. Направление и скорость полета определяются углом наклона вертикальной оси вращения несущих плоскостей 1 т.е. величиной смещения центра тяжести летательного аппарата относительно центра 3 давления подъемной силы несущих плоскостей 1 с помощью ручки 6. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Махолет для полета в воздухе, состоящий из несущих плоскостей (крыльев) и корпуса,отличающийся тем, что крестовины с тремя степенями свободы, присоединены к вертикальной оси вращения несущих плоскостей и рамы,связанной со скользящим по вертикали колебательным относительно авторотирующих несущих плоскостей механизмом. 2. Махолет по п.1, отличающийся тем, что уравновешены аэродинамические силы набегающей и отступающей вращающихся несущих плоскостей в различных по скорости и направлению потоках воздуха в полете, автомат перекоса несущих плоскостей имеет свободную, но упругую связь осей, вращение вокруг продольной оси несущих плоскостей с пределами углов установки от плюс 90 до минус 90, а продольные оси несущих плоскостей связаны пружиной с направлением упругих сил на увеличение угла установки с выдерживанием оптимальных углов атаки несущих плоскостей без потери аэродинамического качества. 3. Махолет по п.1, отличающийся тем, что скользящая подвесная система подрессорена относительно несущих плоскостей и жестко связана подвесной системой с полезным весом,включающим двигатель, пассажира, грузы и т. п.
МПК / Метки
МПК: B64C 27/00, B64C 33/02
Метки: махолет
Код ссылки
<a href="https://kz.patents.su/5-ip27317-maholet.html" rel="bookmark" title="База патентов Казахстана">Махолет</a>
Махолёт-мускулолёт
Номер инновационного патента: 21325
Опубликовано: 15.06.2009
Автор: Бадыров Олег Капанович
МПК: B64C 31/04
Метки: махолёт-мускулолёт
Формула / Реферат:
Изобретение относится к технике сверхлегких летательных аппаратов, к махолётам-мускулолётам, и может быть использовано при изготовлении таких летательных аппаратов.Техническим результатом изобретения является повышение эффективности осуществления машущих движений крыльями летательного аппарата за счет импульсного приложения энергии ног пилота, при обеспечении простоты управления и безопасности полёта на нем, аналогичного полёту на...
Способ полета в атмосфере и орнитоптер для его осуществления
Номер предварительного патента: 3172
Опубликовано: 15.03.1996
Авторы: Семикопенко Павел Борисович, Мухамбетжанов Салтанбек Талапединович, Калыбаев Айсултан Абдуллович, Айдарбеков Адильхан Оспанкулович, Отелбаев Мухтарбай Отелбаевич, Мухамбетжанов Асылбек Талапединович
МПК: B64C 33/00
Метки: атмосфере, осуществления, способ, орнитоптер, полета
Формула / Реферат:
Изобретение относится к области авиации, использующей принцип полета птиц - орнитоптерам.Достигаемый изобретением технический результат - повышение КПД и снижение расхода энергии.Способ полета и осуществляющий его орнитоптер основаны на использовании реакции еще одной среды, кроме воздуха атмосферы - геомагнитного поля. Для этого крылья орнитоптера содержат распределенные по плоскости сверхпроводящие витки с током, магнитное поле которых...
Способ полета летательного аппарата
Номер патента: 14903
Опубликовано: 15.10.2004
Автор: Втулкин Александр Павлович
МПК: B64C 27/00
Метки: способ, аппарата, летательного, полета
Формула / Реферат:
Изобретение относится к области авиации.Известен способ полета летательного аппарата(ЛА), основанный на применении ветродвигателей,недостатками которого является невысокое аэродинамическое качество из-за придания плоскостямвращения ветроколес положительного угла атакиотносительно набегающего воздушного потока, вызывая тем самым увеличение лобового сопротивления, и невозможность вертикального взлета.Технический результат изобретения -...
Ветродвигатель Втулкина-2м
Номер предварительного патента: 15535
Опубликовано: 15.03.2005
Автор: Втулкин Александр Павлович
МПК: F03D 7/00, B64C 23/00
Метки: ветродвигатель, втулкина-2м
Формула / Реферат:
Изобретение относится к области ветроэнергетики и авиации, в частности, к конструкции ветродвигателей, которые могут быть использованы влетательных аппаратах (ЛА).Техническим результатом изобретения являетсяуправление, при принудительном вращении ветроколес силовой установкой ЛА, положением вектораполной аэродинамической силы в ветродвигателе засчет изменения в плоскости вращения ветроколесположения лопастей на махах ветроколес, находящихся в...
Вертолёт, например мускулолёт
Номер инновационного патента: 20312
Опубликовано: 17.11.2008
Автор: Бадыров Олег Капанович
МПК: B64C 31/04
Метки: например, мускулолёт, вертолёт
Формула / Реферат:
Изобретение относится к технике летательных аппаратов, выполненных по вертолётной схеме, в частности к мускулолётам, у которых подъёмная сила возникает при вращении несущего ротора с его аэродинамическими крыльями.Задачей изобретения является разработка вертолета в частности, мускулолёта, у которого вращение несущего ротора осуществляется более экономично, чем у известных аналогов, за счет импульсного приложения крутящего момента к крыльям...
Предыдущий патент: Способ контроля герметичности системы питания дизельного двигателя топливом.
Следующий патент: Гибкая упаковка со средством повторного закрывания
Случайный патент: Способ приготовления катализатора для очистки выхлопных газов двигателя внутреннего сгорания