Многодвигательный асинхронный электропровод
Формула / Реферат
Изобретение относится к электротехнике и может быть использовано в электроприводах общепромышленных механизмов.
Технический результат изобретения - повышение точности, расширение диапазона регулирования и обеспечение согласованного вращения скоростей электродвигателей.
Технический результат достигается тем, что в многодвигательном асинхронном электроприводе, регулирование происходит следующим образом, от симметричной сети переменного тока, в статорные обмотки асинхронных электродвигателей, подается питающее напряжение, за счет чего в обмотках роторов наводится ЭДС. Аналоговая информация о значениях токов статора и скоростей, от соответствующих датчиков тока статора, через блоки согласования тока статора и датчиков скорости, через блоки согласования скорости, поступает в порт ввода и далее в аналого-цифровой преобразователь. Аналоговые величины, преобразо-вываются аналого-цифровым преобразователем, в цифровые коды и преобразованные данные выставляются на внутреннюю шину. Центральный процессор, считывает цифровые коды с внутренней шины и в соответствии с заданным законом регулирования, при отклонении от заданных значений текущих параметров, подает полученные цифровые данные в широтно-импульсный модулятор, который формирует необходимую ширину и длительность подачи управляющих импульсов и посредством порта вывода, подает импульсы к входам двунаправленных регистров сдвига, которые подключают необходимые значения сопротивлений в цепи роторов, на определенный заданный промежуток времени, что ведет к согласованному вращению электродвигателей и выравниванию нагрузки. Устройство позволяет автоматически регулировать скорости системы электропривода.
Текст
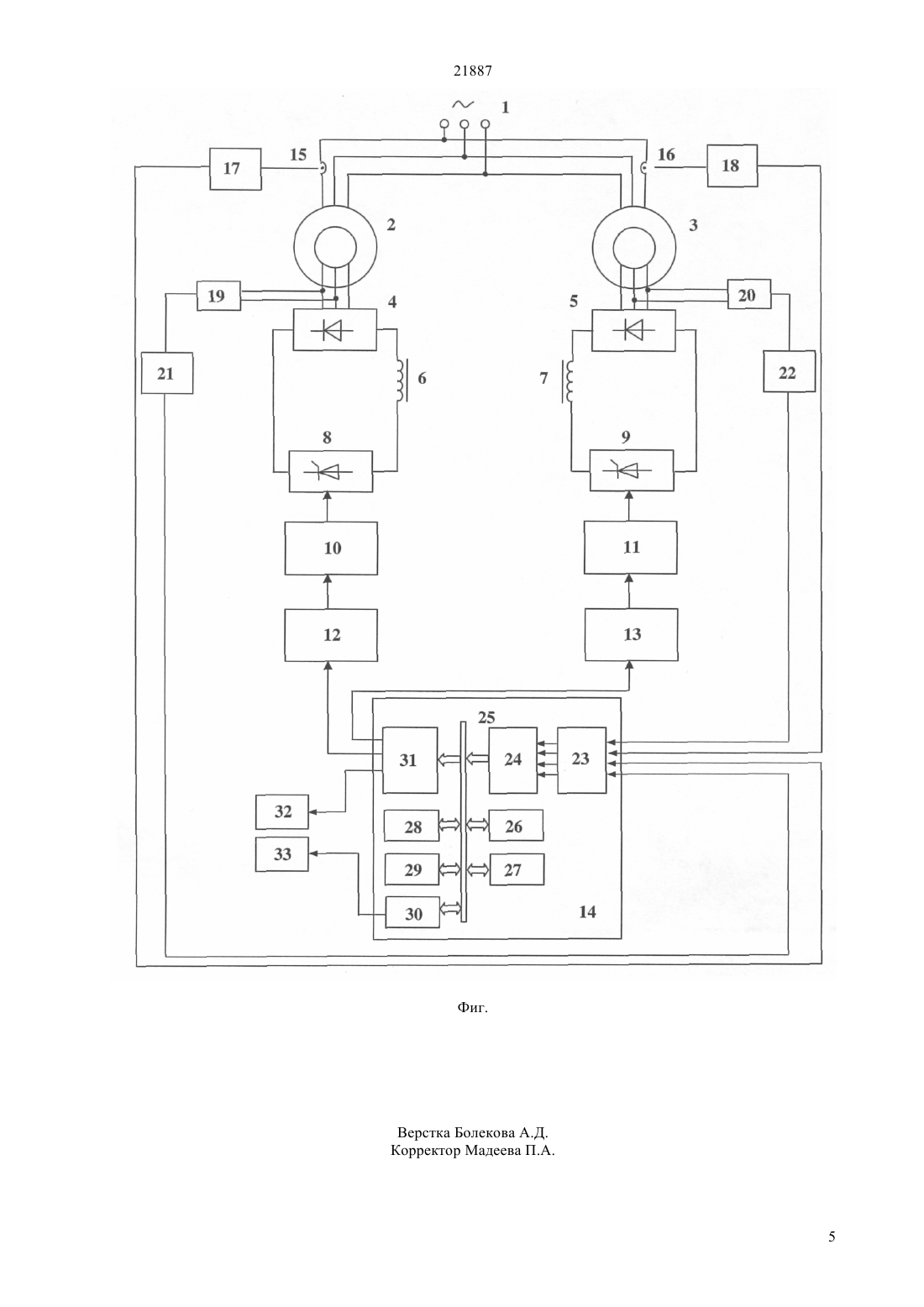
(51) 02 5/50 (2006.01) КОМИТЕТ ПО ПРАВАМ ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ МИНИСТЕРСТВА ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ИННОВАЦИОННОМУ ПАТЕНТУ значениях токов статора и скоростей, от соответствующих датчиков тока статора, через блоки согласования тока статора и датчиков скорости, через блоки согласования скорости,поступает в порт ввода и далее в аналого-цифровой преобразователь. Аналоговые величины, преобразовываются аналого-цифровым преобразователем, в цифровые коды и преобразованные данные выставляются на внутреннюю шину. Центральный процессор, считывает цифровые коды с внутренней шины и в соответствии с заданным законом регулирования, при отклонении от заданных значений текущих параметров, подает полученные цифровые данные в широтно-импульсный модулятор, который формирует необходимую ширину и длительность подачи управляющих импульсов и посредством порта вывода, подает импульсы к входам двунаправленных регистров сдвига, которые подключают необходимые значения сопротивлений в цепи роторов, на определенный заданный промежуток времени, что ведет к согласованному вращению электродвигателей и выравниванию нагрузки. Устройство позволяет автоматически регулировать скорости системы электропривода.(72) Сагитов Пулат Исмаилович Утегулов Болатбек Бахитжанович Исенов Султанбек Сансызбаевич(73) Республиканское государственное казенное предприятие Павлодарский государственный университет им. С. Торайгырова Министерства образования и науки Республики Казахстан(57) Изобретение относится к электротехнике и может быть использовано в электроприводах общепромышленных механизмов. Технический результат изобретения - повышение точности, расширение диапазона регулирования и обеспечение согласованного вращения скоростей электродвигателей. Технический результат достигается тем, что в многодвигательном асинхронном электроприводе,регулирование происходит следующим образом, от симметричной сети переменного тока, в статорные обмотки асинхронных электродвигателей, подается питающее напряжение, за счет чего в обмотках роторов наводится ЭДС. Аналоговая информация о 21887 Изобретение относится к электротехнике и может быть использовано в электроприводах общепромышленных механизмов. Известен многодвигательный асинхронный электропривод,содержащий асинхронные электродвигатели с фазным ротором, выпрямители,вход каждого из которых подключен к обмотке ротора соответствующего электродвигателя, а выходы выпрямителей соединены параллельно и через дроссель подключены к импульсному регулятору тока, параллельно которому включены последовательно соединенные резистор и конденсатор, блок задания скорости, соединенный с первым выходом блока управления импульсным регулятором тока, второй вход которого соединен с выходом блока выделения тока нагруженного электродвигателя, подключенного входами к соответствующим датчикам токов обмоток роторов электродвигателей, датчик напряжения обмотки ротора, соединенный с входом блока управления импульсным регулятором тока а.с. СССР 699642,кл. Н 02 Р 5/50, 1977. Недостатком известного устройства является низкая точность регулирования скорости электродвигателей. Наиболее близким к предлагаемому является многодвигательный асинхронный электропривод,содержащий асинхронные электродвигатели,выпрямители, вход каждого из которых подключен к обмотке ротора соответствующего электродвигателя,а выходы выпрямителей соединены параллельно и через дроссель подключены к последовательно соединенным резистору и конденсатору, параллельно которым подключен импульсный регулятор тока, к входам блоков управления импульсным регулятором тока подключены выходы блока выделения тока нагруженного электродвигателя, блок задания скорости и блок выделения скорости нагруженного электродвигателя, входы которого подключены к датчикам скорости электродвигателей, к входам блока выделения тока нагруженного электродвигателя подключены датчики тока обмотки роторов электродвигателей а.с. СССР 1001414, кл. Н 02 Р 5/50, 1981. Недостатком известного устройства является низкая точность регулирования скорости электродвигателей и невозможность поддержания заданной скорости вращения при широком изменении нагрузки на валу двигателей. Технический результат изобретения - повышение точности, расширение диапазона регулирования и обеспечение согласованного вращения скоростей электродвигателей. Технический результат достигается тем, что в многодвигательный асинхронный электропривод, в цепи статоров каждого электродвигателя, введены датчики тока статора, блоки согласования тока статора, блоки согласования скорости, магазины сопротивлений с последовательно включенными оптронами, двунаправленные регистры сдвига,микропроцессорная система управления, ручные кнопки управления, жидкокристаллический экран, к портам микропроцессорной системы управления,2 посредством блоков согласования токов статора,выполняющих роль гальванической развязки,подключаются датчики тока статора каждого электродвигателя, в цепи выпрямленных токов ротора подключены магазины сопротивлений, с определенными заданными величинами, последовательно которым подключены оптроны, входы оптронов подключены к выходам двунаправленных регистров сдвига, входы двунаправленных регистров сдвига подключены к микропроцессорной системе управления, к выходу микропроцессорной системы управления подключены жидкокристаллический экран и ручные кнопки управления. На фиг. показана блок-схема, многодвигательного асинхронного электропривода. Электропривод содержит трехфазную электрическую сеть 1, асинхронные электродвигатели 2, 3, в цепи роторов которых подключены выпрямители 4,5, к выходу которых, через сглаживающие дроссели 6, 7, подключены управляющие коммутаторы 8, 9,выходы которых подключены к магазинам сопротивлений 10, 11 с последовательно включенными оптронами, выходы которых посредством двунаправленных регистров сдвига 12, 13,подключены к микропроцессорной системе управления 14, в цепи статоров подключены датчики тока статоров 15, 16, которые через блоки согласования токов статора 17, 18 и включенные в переменные цепи роторов датчики скорости 19, 20, которые через блоки согласования скоростей 21, 22, передают считываемые данные токов статора и скорости в порт ввода 23, поступившие данные преобразовываются в аналого-цифровом преобразователе 24, в цифровые коды и посредством внутренней шины 25,передаются центральному процессору 26, таймер 27 ведет отсчет реального времени, процессор обращаясь к оперативному запоминающему устройству 28 и постоянному запоминающему устройству 29, извлекает необходимые коды команд и производит арифметико-логические операции над поступившими данными, при отклонении от заданных значений, полученные цифровые коды поступают в широтно-импульсный модулятор 30,который формирует необходимую ширину и длительность подачи управляющих импульсов и посредством порта вывода 31, подает импульсы к входам двунаправленных регистров сдвига, которые подключают необходимые значения сопротивлений в цепи роторов,на определенный заданный промежуток времени, что ведет к согласованному вращению электродвигателей 2, 3 и выравниванию нагрузки, в качестве периферийных устройств к микропроцессорной системе управления 14,подключены жидкокриссталическии экран 32 и ручные кнопки управления 33. Магазины сопротивлений 10, 11, представляют собой заданные величины сопротивлений последовательно которым подключены оптроны,играющие роль гальванической развязки, один магазин сопротивлений содержит семь цепей последовательно включенных сопротивлений и оптронов, сопротивления имеют величины от меньшего, по отношению к среднему значению 21887 сопротивления и возрастают к большей величине по отношению к среднему значению, коммутация сопротивлениями происходит путем подачи высокого уровня напряжения на фотоизлучатель оптрона, под воздействием светового излучения фотоприемник открывается и по цепи проходит ток, подключая в цепь выпрямленного тока ротора необходимое сопротивление с определенной величиной, тем самым возможно плавное изменение скоростей электродвигателей, вследствие чего расширяется диапазон регулирования,также оптроны обеспечивают надежную гальваническую развязку,между силовой цепью управляющих коммутаторов 8,9, и микропроцессорной системой управления 14. Двунаправленные регистры сдвига 12, 13, при подаче сигнала управления на вход регистров сдвига,выполняют функцию сдвига управляющего воздействия, сдвиг бывает двух видов сдвиг информации вправо, в сторону разрядов с большими номерами и сдвиг информации влево, в сторону разрядов с меньшими номерами. При нулевом сигнале на входах двунаправленных регистров сдвига, они переходят в режим хранения. Запись и чтение информации происходит по двунаправленной шине данных, при этом двунаправленные выводы данных имеют повышенную нагрузочную способность, что позволяет легко сопрягать данные регистры сдвига 12, 13 с микропроцессорной системой управления 14. Также двунаправленные регистры сдвига 12, 13 позволяют разгрузить порт ввода 23, микропроцессорной системы управления 14, путем подключения меньшего числа выводов. Микропроцессорная система управления 14 выполнена в виде однокристального микроконтроллера, содержащего порт ввода 23, аналого-цифровой преобразователь 24, основные узлы и устройства связывает внутренняя двунаправленная шина 25,центральный процессор 26, таймер 27, оперативное запоминающее устройство 28,постоянное запоминающее устройство 29, широтно-импульсный модулятор 30, порт вывода 31. Центральный процессор 26 может быть выполнен в виде электронных схем, на основе триггеров и структурно содержит арифметико-логическое устройство, управляющую память, схему управления вводом-выводом, регистры общего назначения,схемы начального пуска, контроллера прерывания,генератора тактовых импульсов и связей между ними. Порты 23, 31 могут быть выполнены на основе регистров с параллельной записью и шинных формирователей. Аналого-цифровой преобразователь 24 может быть выполнен в виде цифровой схемы. Оперативное запоминающее устройство 28 может быть выполнено, на основе статических ячеек. Таймер 27 может быть выполнен в виде цифровых счетчиков. Постоянное запоминающее устройство 29 может быть выполнено на основе БИС ПЗУ. иротно-импульсный модулятор 30 выполнен на основе электронных схем и в его состав входят генератор опорного напряжения,пороговое устройство, формирователь управляющих импульсов. Внутренняя двунаправленная шина 25 выполняется в виде проводной линии связи. Управление происходит следующим образом. От симметричной сети переменного тока 1, в статорные обмотки асинхронных электродвигателей 2, 3, подается питающее напряжение, за счет чего в обмотках роторов наводится ЭДС. Аналоговая информация о значениях токов статоров и скоростей,от соответствующих датчиков тока статора 15, 16,через блоки согласования токов статора 17, 18, и датчиков скорости 19, 20, через блоки согласования скоростей 21, 22, поступает в порт ввода 23 и далее в аналого-цифровой преобразователь 24. Аналоговые величины, преобразовываются аналого-цифровым преобразователем 24, в цифровые коды и преобразованные данные выставляются на внутреннею шину 25. Центральный процессор 26,считывает цифровые коды с внутренней шины 25 и в соответствии с заданным законом регулирования, при отклонении от заданных значений текущих параметров, подает полученные цифровые данные в широтно-импульсный модулятор 30, который формирует необходимую ширину и длительность подачи управляющих импульсов,которые необходимо подать к системе управления электроприводом, для изменения регулируемых электромеханических параметров, что ведет к согласованному вращению электродвигателей 2, 3 и выравниванию нагрузки, сигналы управления выставляются на внутреннею шину 25 и с помощью порта вывода 31,поступают на входы двунаправленных регистров сдвига 12, 13, которые в соответствии со своим назначением подключают необходимое значение сопротивления в цепи роторов, на определенный заданный промежуток времени. Устройство позволяет автоматически регулировать скорости системы электропривода. При соотношении двигателей 2 Мном 3, когда двигатель 2 недогружен, а двигатель 3 в заданных пределах, микропроцессорная система управления 14,в первую очередь на основе текущих значений,поступающих от датчиков тока статора 15, 16 и скорости 19, 20, определяет в заданных пределах регулирования работает электродвигатель 2, если да,то микропроцессорная система управления 14 рассчитывает значение управляющего импульса способного вывести двигатель 2 к согласованному режиму работы, и посылает сигнал управления,который с помощью регистра сдвига 12 и оптрона подключает в цепь ротора электродвигателя 2,сопротивление с большим значением, тем самым давая выйти двигателю 2, к согласованному режиму работы с электродвигателем 3, если же электродвигатель 2 выходит за пределы регулирования,микропроцессорная система управления 14 отключает систему электропривода и выдает сигнал на дисплей о прекращении работы, изза недопустимого режима. При соотношении двигателей 3 Мном 2, когда электродвигатель 3 недогружен, а двигатель 2 в заданных пределах, микропроцессорная система управления 14, в первую очередь на основе текущих значений, поступающих от датчиков тока статора и 21887 скорости определяет, в заданных пределах регулирования работает электродвигатель 3, если да,то микропроцессорная система управления 14 рассчитывает значение управляющего импульса способного вывести двигатель 3 к согласованному режиму работы, и посылает сигнал управления,который с помощью регистра сдвига 13 и оптрона подключает в цепь ротора электродвигателя 3,сопротивление с большим значением, тем самым давая выйти двигателю 3, к согласованному режиму работы с электродвигателем 2, если же двигатель 3 выходит за пределы регулирования,то микропроцессорная система управления 14 отключает систему электропривода и выдает сигнал на дисплей о прекращении работы, из-за недопустимого режима работы системы электропривода. При соотношении двигателей 2 Мном 3, когда двигатель 2 перегружен, а электродвигатель 3 в заданных пределах, микропроцессорная система управления 14 на основе текущей информации,поступающей от датчиков тока статора и скорости определяет, в заданных пределах регулирования работает электродвигатель 2, если да, то микропроцессорная система управления 14 рассчитывает значение управляющего импульса способного вывести двигатель 2 к согласованному режиму работы, и посылает сигнал управления,который с помощью регистра сдвига 12 и оптрона подключает в цепь ротора двигателя 2,сопротивление с меньшим значением, тем самым давая выйти электродвигателю 2, к согласованному режиму работы с двигателем 3, если же электродвигатель 2 выходит за пределы регулирования,микропроцессорная система управления 14 отключает систему электропривода и выдает сигнал на дисплей о прекращении работы, изза недопустимого режима. При соотношении двигателей 3 Мном 2, когда двигатель 3 перегружен, а электродвигатель 2 в заданных пределах,микропроцессорная система управления 14 на основе текущей информации, поступающей от датчиков тока статора и скорости определяет, в заданных пределах регулирования работает двигатель 3, если да, то микропроцессорная система управления 14 рассчитывает значение управляющего импульса способного вывести двигатель 3 к согласованному режиму работы, и посылает сигнал управления,который с помощью регистра сдвига 13 и оптрона подключает в цепь ротора электродвигателя 3,сопротивление с меньшим значением, тем самым давая выйти двигателю 3, к согласованному режиму работы с электродвигателем 2, если же электродвигатель 3,выходит за пределы регулирования, то система управления отключает систему электропривода и выдает сигнал на дисплей о прекращении работы, из-за недопустимого режима. При соотношении двигателей 23, когда скорости вращения электродвигателей 2 и 3 работают согласованно,в соответствии с этим микропроцессорная система управления 14 работает в режиме диагностики системы электропривода. На практике согласованное вращение электродвигателей, входящих в систему многодвигательного электропривода встречается очень редко, в связи с разбросом электромеханических параметров двигателей. Разработанное устройство позволяет обеспечить равенство скоростей вращения системы много двигательного асинхронного электропривода и автоматически поддерживать определенное заданное соотношение скорости вращения между ними,применение в качестве системы управления микропроцессорного средства, двунаправленных регистров сдвига и магазинов сопротивлений,позволяет обеспечить гибкость в управлении системой электропривода, за счет возможности изменения функций, сменив программу работы электромеханической системы. ФОРМУЛА ИЗОБРЕТЕНИЯ Многодвигательный асинхронный электропривод,содержащий трехфазную электрическую сеть,асинхронные электродвигатели, выпрямители, вход каждого из которых подключен к обмотке ротора соответствующего электродвигателя, а выходы выпрямителей соединены параллельно и через сглаживающий дроссель,подключены к управляющему коммутатору, параллельно которым включены последовательно соединенные резистор и конденсатор, к выходу электродвигателей, к обмоткам роторов подключены датчики скорости, а в цепь выпрямленного тока ротора подключены датчики тока, отличающийся тем, что, в цепи статоров каждого электродвигателя, введены датчики тока статора, блоки согласования тока статора, блоки согласования скорости, магазины сопротивлений с последовательно включенными оптронами,двунаправленные регистры сдвига,микропроцессорная система управления, ручные кнопки управления, жидкокристаллический экран, к портам микропроцессорной системы управления,посредством блоков согласования токов статора,выполняющих роль гальванической развязки,подключаются датчики тока статора каждого электродвигателя, в цепи выпрямленных токов ротора подключены магазины сопротивлений, с определенными заданными величинами,последовательно которым подключены оптроны,входы оптронов подключены к выходам двунаправленных регистров сдвига,входы двунаправленных регистров сдвига подключены к микропроцессорной системе управления, к выходу микропроцессорной системы управления подключены жидкокристаллический экран и ручные кнопки управления.
МПК / Метки
МПК: H02P 5/50
Метки: асинхронный, электропровод, многодвигательный
Код ссылки
<a href="https://kz.patents.su/5-ip21887-mnogodvigatelnyjj-asinhronnyjj-elektroprovod.html" rel="bookmark" title="База патентов Казахстана">Многодвигательный асинхронный электропровод</a>
Многодвигательный асинхронный электропривод
Номер инновационного патента: 20859
Опубликовано: 16.02.2009
Авторы: Марковский Вадим Павлович, Ахметов Рустам Болатович, Исенов Султанбек Сансызбаевич, Утегулов Болатбек Бахитжанович
МПК: H02P 5/50
Метки: асинхронный, электропривод, многодвигательный
Формула / Реферат:
Изобретение относится к электротехнике и может быть использовано в электроприводах общепромышленных механизмов.Технический результат изобретения - повышение точности и расширение диапазона регулирования скорости электродвигателей.Технический результат достигается тем, что в многодвигательный асинхронный электропривод, введены датчики тока в цепи статора, каждого электродвигателя, четыре блока согласования токов, два блока согласования...
Многодвигательный асинхронный электропривод переменного тока
Номер предварительного патента: 14843
Опубликовано: 15.09.2004
Авторы: Тергемес Кажыбек Тлеугалиулы, Анарбаев Алмас Алишерович, Арынов Аскар Кокенович
МПК: H02P 5/50
Метки: тока, электропривод, многодвигательный, переменного, асинхронный
Формула / Реферат:
Изобретение относится к электротехнике и может быть использовано в регулируемых многодвигательных асинхронных электроприводах переменного тока.Для обеспечения плавности пуска электродвигателей системы в общую роторную цепь многодвигательного электропривода подключен управляемыйвыпрямитель. Оригинальностью изобретения является, что для получения синхроимпульса использованы роторные ЭДС, изменяющиеся по модулю и почастоте. Данное изобретение может...
Многодвигательный асинхронный электропривод переменного тока
Номер предварительного патента: 19191
Опубликовано: 14.03.2008
Авторы: Тергемес Кажыбек Тлеугалиулы, Абильдинова Венера Бахытжановна, Акпанбетов Дархан Берикович, Сарсенбаев Ерлан Алиаскарович, Бердибеков Абдисаттар Опабекович
МПК: H02P 5/50
Метки: асинхронный, переменного, многодвигательный, электропривод, тока
Формула / Реферат:
Изобретение относится к электротехнике, в частности, к регулируемым многодвигательным электроприводам переменного тока.Разработанный многодвигательный электропривод переменного тока позволяет осуществить синхронное регулирование моментов с помощью несимметричных регуляторов напряжения и синхронное торможение несимметричным питанием статорных обмоток асинхронных электродвигателей. Такое устройство предварительной синхронизации и синхронного...
Многодвигательный электропривод переменного тока
Номер предварительного патента: 19075
Опубликовано: 15.01.2008
Авторы: Тергемес Кажыбек Тлеугалиулы, Карымсаков Талапбек Каирбекович
МПК: H02P 5/50
Метки: электропривод, многодвигательный, переменного, тока
Формула / Реферат:
Изобретение относится к электротехнике, в частности, к регулируемым многодвигательным электроприводам переменного тока.В многодвигательном асинхронном электроприводе переменного тока для расширения диапазона регулирования скорости вращения электродвигателей использованы полностью управляемый тиристорный выпрямитель, подключенный на общие роторные цепи электродвигателей, а выходы этого выпрямителя подключены к силовому транзисторному ключу с...
Тяговый асинхронный электропривод с питанием от контактной сети постоянного тока
Номер предварительного патента: 19995
Опубликовано: 15.09.2008
Авторы: Аубакиров Даурен Канатбекович, Акпанбетов Дархан Берикович, Абилов Олжас Капетович, Тергемес Кажыбек Тлеугалиулы
МПК: B60L 9/16
Метки: тяговый, асинхронный, сети, постоянного, тока, контактной, электропривод, питанием
Формула / Реферат:
Изобретение может быть использовано в тяговых электроприводах электроподвижного состава для регулирования скорости движения.В устройстве для регулирования скорости вращения тягового асинхронного электродвигателя использован транзисторный автономный инвертор напряжения, построенный на силовых биполярных транзисторах с изолированным затвором. Автономный инвертор напряжения подключен к контактной сети - сеть постоянного тока, которые в совокупности...
Предыдущий патент: Способ выявления потери питания группы трехфазных электродвигателей
Следующий патент: Способ регулирования возбуждения асинхронизированного синхронного компенсатора
Случайный патент: Способ отбора и подбора овец для получения ягнят со шкурками черной окраски каракульчового смушкового типа