Многодвигательный асинхронный электропривод
Номер инновационного патента: 20859
Опубликовано: 16.02.2009
Авторы: Исенов Султанбек Сансызбаевич, Утегулов Болатбек Бахитжанович, Ахметов Рустам Болатович, Марковский Вадим Павлович
Формула / Реферат
Изобретение относится к электротехнике и может быть использовано в электроприводах общепромышленных механизмов.
Технический результат изобретения - повышение точности и расширение диапазона регулирования скорости электродвигателей.
Технический результат достигается тем, что в многодвигательный асинхронный электропривод, введены датчики тока в цепи статора, каждого электродвигателя, четыре блока согласования токов, два блока согласования напряжений, два блока гальванической развязки, микропроцессорная система управления, жидкокристаллический экран и кнопки управления, выходы датчиков тока статора и датчиков тока ротора через блоки согласования токов, а датчиков напряжения через блоки согласования напряжений подключены к входу микропроцессорной системы управления, к выходу микропроцессорной системы управления подключены жидкокристаллический экран, кнопки управления и входы блоков гальванической развязки, выходы блоков гальванической развязки подключены к коммутаторам.
Текст
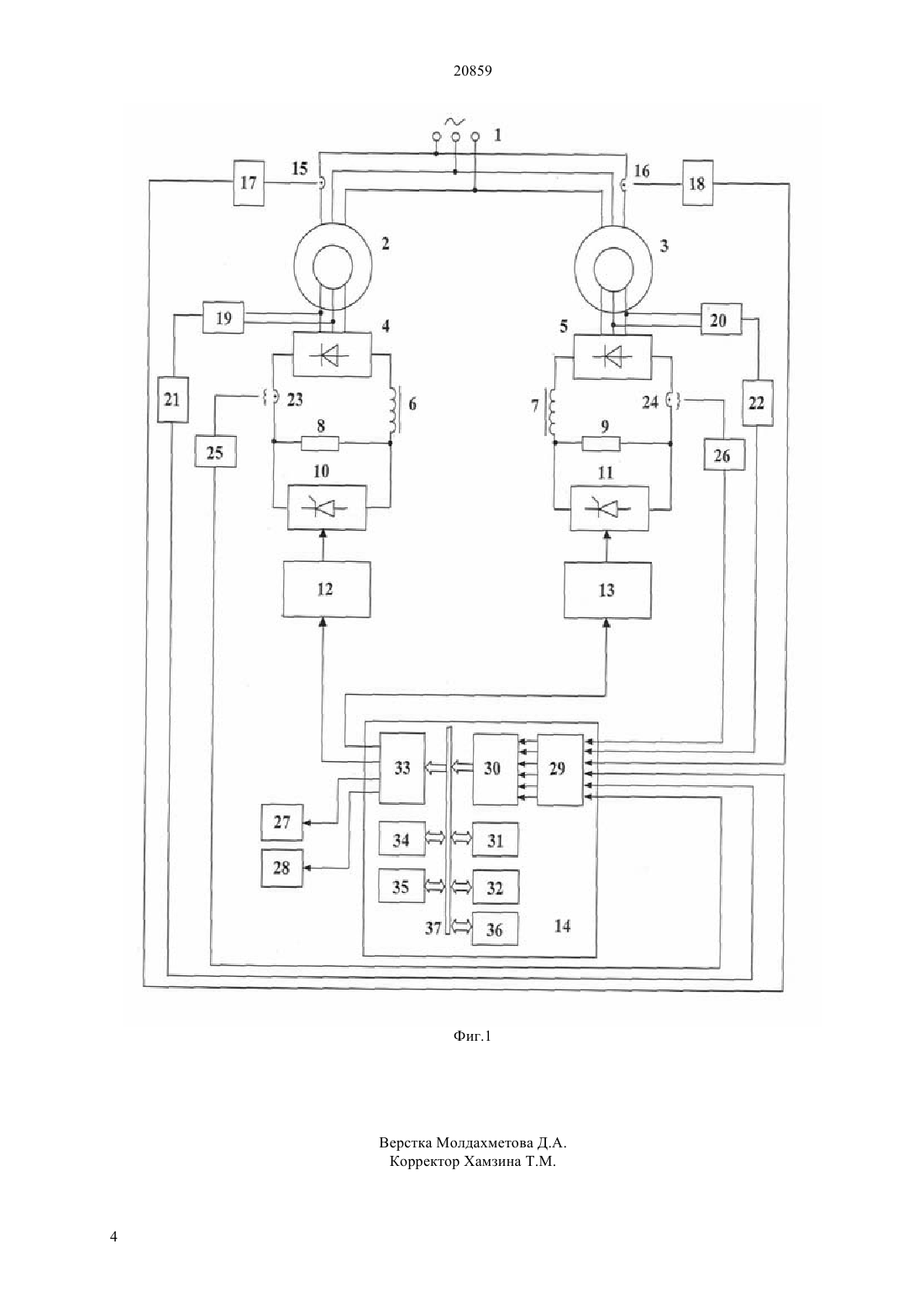
(51) 02 5/50 (2006.01) КОМИТЕТ ПО ПРАВАМ ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ МИНИСТЕРСТВА ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ИННОВАЦИОННОМУ ПАТЕНТУ Технический результат достигается тем, что в многодвигательный асинхронный электропривод,введены датчики тока в цепи статора, каждого электродвигателя, четыре блока согласования токов,два блока согласования напряжений, два блока гальванической развязки,микропроцессорная система управления, жидкокристаллический экран и кнопки управления, выходы датчиков тока статора и датчиков тока ротора через блоки согласования токов, а датчиков напряжения через блоки согласования напряжений подключены к входу микропроцессорной системы управления, к выходу микропроцессорной системы управления подключены жидкокристаллический экран, кнопки управления и входы блоков гальванической развязки, выходы блоков гальванической развязки подключены к коммутаторам.(72) Утегулов Болатбек Бахитжанович Марковский Вадим Павлович Исенов Султанбек Сансызбаевич Ахметов Рустам Болатович(73) Республиканское государственное казенное предприятие Павлодарский государственный университет им. С. Торайгырова Министерства образования и науки Республики Казахстан(57) Изобретение относится к электротехнике и может быть использовано в электроприводах общепромышленных механизмов. Технический результат изобретения - повышение точности и расширение диапазона регулирования скорости электродвигателей. 20859 Изобретение относится к электротехнике и может быть использовано в электроприводах общепромышленных механизмов. Известен многодвигательный асинхронный электропривод,содержащий асинхронные электродвигатели с фазным ротором, выпрямители,вход каждого из которых подключен к обмотке ротора соответствующего электродвигателя, а выходы выпрямителей соединены параллельно и через дроссель подключены к импульсному регулятору тока, параллельно которому включены последовательно соединенные резистор и конденсатор, блок задания скорости, соединенный с первым выходом блока управления импульсным регулятором тока, второй вход которого соединен с выходом блока выделения тока нагруженного электродвигателя, подключенного входами к соответствующим датчикам токов обмоток роторов электродвигателей, датчик напряжения обмотки ротора, соединенный с входом блока управления импульсным регулятором тока (а.с. СССР 699642,кл. Н 02 Р 5/50, 1977). Недостатком известного устройства является низкая точность регулирования скорости электродвигателей. Наиболее близким к предлагаемому является многодвигательный асинхронный электропривод,содержащий асинхронные электродвигатели,выпрямители, вход каждого из которых подключен к обмотке ротора соответствующего электродвигателя,а выходы выпрямителей соединены параллельно и через дроссель подключены к последовательно соединенным резистору и конденсатору, параллельно которым подключен импульсный регулятор тока, к входам блоков управления импульсным регулятором тока подключены выходы блока выделения тока нагруженного электродвигателя, блок задания скорости и блок выделения скорости нагруженного электродвигателя, входы которого подключены к датчикам скорости электродвигателей, к входам блока выделения тока нагруженного электродвигателя подключены датчики тока обмотки роторов электродвигателей (а.с. СССР 1001414, кл. Н 02 Р 5/50, 1983). Недостатком известного устройства является низкая точность регулирования скорости электродвигателей и невозможность поддержания заданной скорости вращения при широком изменении нагрузки на валу двигателей. Технический результат изобретения - повышение точности и расширение диапазона регулирования скорости электродвигателей. Технический результат достигается тем, что в многодвигательный асинхронный электропривод,введены датчики тока в цепи статора, каждого электродвигателя, четыре блока согласования токов,два блока согласования напряжений, два блока гальванической развязки,микропроцессорная система управления, жидкокристаллический экран и кнопки управления, выходы датчиков тока статора и датчиков тока ротора через блоки согласования токов, а датчиков напряжений через блоки 2 согласования напряжений подключены к входу микропроцессорной системы управления, к выходу микропроцессорной системы управления подключены жидкокристаллический экран, кнопки управления и входы блоков гальванической развязки, выходы блоков гальванической развязки подключены к коммутаторам. На фиг. 1 показана блок-схема, многодвигательного асинхронного электропривода. Многодвигательный асинхронный электропривод содержит, симметричную сеть переменного тока 1, асинхронные электродвигатели 2, 3, в цепь роторов которых подключены выпрямители 4, 5, к выходу которых, через сглаживающие дроссели 6, 7, подключены сопротивления 8, 9, параллельно которым подключены коммутаторы 10, 11, к входу которых подключены выходы блоков гальванической развязки 12. 13, вход которых подключен к выходу микропроцессорной 14 системы управления,датчики 15, 16 тока цепи статора через блоки 17, 18 согласования токов, датчики 19, 20 напряжения через блоки 21, 22 согласования напряжений и датчики 23, 24 тока ротора через блоки 25, 26 согласования токов, подключены к входу микропроцессорной 14 системы управления, к выходам подключены жидкокристаллический экран 27 и кнопки управления 28. Микропроцессорная система 14 управления может быть выполнена в виде однокристального микроконтроллера,содержащего порт ввода 29, аналого-цифровой преобразователь 30, центральный процессор 31,таймер 32, порт вывода 33, оперативное запоминающее устройство 34,постоянное запоминающее устройство 35, широтно-импульсный модулятор 36, основные узлы и устройства связывает внутренняя двунаправленная шина данных 37. Центральный процессор 31 может быть выполнен в виде электронных схем, на основе триггеров и структурно содержит арифметикологическое устройство, управляющую память,схему управления вводом-выводом, регистры общего назначения, схемы начального пуска,контроллера прерывания, генератора тактовых импульсов и связей между ними. Порты 29, 33 могут быть выполнены на основе регистров с параллельной записью и шинных формирователей. Аналого-цифровой преобразователь 30 может быть выполнен в виде цифровой схемы. Оперативное 34 запоминающее устройство может быть выполнено, на основе статических ячеек. Таймер 32 может быть выполнен в виде цифровых счетчиков. Постоянное запоминающее устройство 35 может быть выполнено на основе БИС ПЗУ. ШИМ 36 выполнен на основе электронных схем и в его состав входят генератор опорного напряжения,пороговое устройство,формирователь управляющих импульсов. Шина 37 выполняется в виде проводной линии связи. Блоки гальванической развязки 12, 13 представляют собой оптроны, включение которых 20859 происходит путем подачи сигнала высокого уровня на фотоизлучатель оптрона, под воздействием светового излучения фотоприемник открывается и по цепи проходит управляющее воздействие, также оптроны обеспечивают надежную гальваническую развязку, между силовой цепью коммутаторов 10, 11 и микропроцессорной системой 14 управления. Устройство работает следующим образом. При подаче напряжения от симметричной сети переменного тока 1 в статорные обмотки электродвигателей 2, 3, в обмотках роторов наводится ЭДС. Напряжение обмотки роторов поступает на входы выпрямителей 4, 5 и по цепи роторов проходит выпрямленный ток. Измерительная информация о текущих значениях параметров, от соответствующих датчиков 15, 16 тока статора через блоки 17, 18 согласования токов,датчиков 19, 20 напряжения через блоки 21, 22 согласования напряжений и датчиков 23, 24 тока ротора через блоки 25, 26 согласования токов,поступает в микропроцессорную систему управления 14 через порт ввода 29, в аналогоцифровой преобразователь 30. Аналого-цифровой преобразователь 30 производит преобразование входной величины напряжения в цифровой код,преобразованные данные выставляются на внутреннюю шину данных 37. Центральный процессор 31 считывает цифровые данные с внутренней шины 37 и инициирует операцию,которую необходимо выполнить системе и информация, через внутреннею шину данных 37,поступает в ШИМ 36. В широтно-импульсном модуляторе 36 входная координата в виде двоичного кода, преобразовывается в координату скважность включения вентилей. Преобразование происходит следующим образом,генератор опорного напряжения вырабатывает опорное напряжение пилообразной формы, пороговое устройство сравнивает сигнал входного напряжения с опорным напряжением и получает сигнал рассогласования, формирователь управляющих импульсов, сравнивает сигнал рассогласования поступающий с выхода порогового устройства, с линейно растущим напряжением пилообразной формы, которое вырабатывает генератор опорного напряжения и формирует широтно-модулированные импульсы для силовых вентилей коммутаторов 10,11. Управляющие импульсы,посредством внутренней шины данных 37, порта вывода 33, через блоки гальванической развязки 12, 13, поступают к силовым вентилям коммутаторов 10,11. Коммутаторы 10, 11 реализуют посредством включения и отключения вентильных ключей тиристоров - заданную с помощью ШИМ скважность. Изменение длительности импульса приводит к изменению времени включенного состояния силовых тиристорных ключей коммутаторов 10, 11 и, следовательно к пропорциональному изменению выходного напряжения, т. е. изменяя скважность импульсов питающего напряжения или скважность изменения величин параметров двигателя, можно регулировать его скорость вращения,с помощью микропроцессорного устройства регулировать скорость двигателя можно автоматически. Преобразованные полученные данные центральный процессор 31 записывает в оперативное запоминающее устройство 34,выполняющее функцию памяти данных, а также выводит значения тока и скорости, поступающие от соответствующих датчиков,на жидкокристаллический экран 27. Управление осуществляется по наиболее нагруженному двигателю, выделяемому по току статора. Предложенное устройство обеспечивает с достаточной точностью определение скорости наиболее загруженного электродвигателя вне зависимости от различия их параметров, чем достигается точность установки, автоматически изменяя время включения тиристорного ключа можно регулировать длительность импульса,вследствие чего расширяется диапазон регулирования скорости, обеспечивается равномерная загрузка электродвигателей системы,упрощается обслуживание и повышается надежность электропривода ФОРМУЛА ИЗОБРЕТЕНИЯ Многодвигательный асинхронный электропривод, содержащий сеть переменного тока,асинхронные электродвигатели, выпрямители, вход каждого из которых подключен к обмотке ротора соответствующего электродвигателя, к выходу которых,через сглаживающие дроссели,подключены сопротивления, параллельно которым подключены управляющие коммутаторы, к выходу электродвигателей, к обмоткам роторов подключены датчики напряжения, а в цепь выпрямленного тока ротора подключены датчики тока,отличающийся тем, что в него введены датчики тока в цепи статора, каждого электродвигателя,четыре блока согласования токов, два блока согласования напряжений,два блока гальванической развязки,микропроцессорная система управления, жидкокристаллический экран и кнопки управления, выходы датчиков тока статора и датчиков тока ротора через блоки согласования токов, а датчиков напряжения через блоки согласования напряжений подключены к входу микропроцессорной системы управления, к выходу микропроцессорной системы управления подключены жидкокристаллический экран, кнопки управления и входы блоков гальванической развязки, выходы блоков гальванической развязки подключены к коммутаторам.
МПК / Метки
МПК: H02P 5/50
Метки: многодвигательный, асинхронный, электропривод
Код ссылки
<a href="https://kz.patents.su/4-ip20859-mnogodvigatelnyjj-asinhronnyjj-elektroprivod.html" rel="bookmark" title="База патентов Казахстана">Многодвигательный асинхронный электропривод</a>
Многодвигательный электропривод многократного прямоточного волочильного стана
Номер патента: 7253
Опубликовано: 15.03.2002
Авторы: Перепелица Николай Георгиевич, Большедворский Виктор Васильевич, Комиссаров Павел Алексеевич, Рябинин Анатолий Иванович, Олейник Виталий Михайлович, Раушенбах Игорь Михайлович
МПК: B21B 35/00, H02P 5/46
Метки: электропривод, волочильного, стана, многократного, прямоточного, многодвигательный
Формула / Реферат:
Изобретение относится к электротехнике, в частности к системам управления многодвигательными электроприводами, и может быть использовано в волочильном производстве, а именно в прямоточных волочильных станах по изготовлению порошковой проволоки.Технический результат изобретения - автоматизация процесса задания величины противонатяжения, обеспечивающей ее стабилизацию.Для этого в многодвигательный электропривод дополнительно введен датчик...
Электропривод переменного тока
Номер предварительного патента: 7252
Опубликовано: 15.02.1999
Авторы: Поляков Данил Валерьевич, Мельников Виктор Юрьевич
МПК: H02P 5/34
Метки: электропривод, тока, переменного
Формула / Реферат:
Изобретение относится к электротехнике, в частности к устройствам управления электроприводами переменного тока с синхронными электродвигателями, и может быть использовано, например, для формирования сигнала обратной связи по положению ротора синхронного электродвигателя при частотном способе управления.Расширение функциональных возможностей и повышение точности регулирования положения ротора синхронного электродвигателя достигается тем, что...
Многодвигательный электропривод переменного тока
Номер инновационного патента: 20351
Опубликовано: 17.11.2008
Автор: Тергемес Кажыбек Тлеугалиулы
МПК: H02P 5/50
Метки: переменного, электропривод, многодвигательный, тока
Формула / Реферат:
Изобретение относится к электротехнике, в частности, к регулируемым многодвигательным электроприводам переменного тока, используемых, например, в многопрочесных чесальных аппаратах.В разработанном многодвигательном электро-приводе переменного тока синхронного вращения использование преобразователя частоты с проме-жуточным звеном постоянного тока позволяет осуществлять торможение асинхронных электродвигателей с отдачей энергии в питающую...
Многодвигательный асинхронный электропривод переменного тока
Номер предварительного патента: 19191
Опубликовано: 14.03.2008
Авторы: Сарсенбаев Ерлан Алиаскарович, Абильдинова Венера Бахытжановна, Бердибеков Абдисаттар Опабекович, Акпанбетов Дархан Берикович, Тергемес Кажыбек Тлеугалиулы
МПК: H02P 5/50
Метки: тока, электропривод, асинхронный, многодвигательный, переменного
Формула / Реферат:
Изобретение относится к электротехнике, в частности, к регулируемым многодвигательным электроприводам переменного тока.Разработанный многодвигательный электропривод переменного тока позволяет осуществить синхронное регулирование моментов с помощью несимметричных регуляторов напряжения и синхронное торможение несимметричным питанием статорных обмоток асинхронных электродвигателей. Такое устройство предварительной синхронизации и синхронного...
Многодвигательный электропривод переменного тока
Номер предварительного патента: 19075
Опубликовано: 15.01.2008
Авторы: Тергемес Кажыбек Тлеугалиулы, Карымсаков Талапбек Каирбекович
МПК: H02P 5/50
Метки: тока, электропривод, переменного, многодвигательный
Формула / Реферат:
Изобретение относится к электротехнике, в частности, к регулируемым многодвигательным электроприводам переменного тока.В многодвигательном асинхронном электроприводе переменного тока для расширения диапазона регулирования скорости вращения электродвигателей использованы полностью управляемый тиристорный выпрямитель, подключенный на общие роторные цепи электродвигателей, а выходы этого выпрямителя подключены к силовому транзисторному ключу с...
Предыдущий патент: Устройство централизованной резервной защиты присоединений схемы шестиугольника
Следующий патент: Способ регистрации огибающей электрического сигнала
Случайный патент: Способ производства виноградного полусладкого жемчужного вина "Morning Dew "