Одночастотный мобильный приемник дифференциальной коррекции
Номер полезной модели: 860
Опубликовано: 14.09.2012
Авторы: Шабельников Евгений Алексеевич, Ахмедов Даулет Шафигуллович, Молдабеков Мейрбек
Формула / Реферат
РЕФЕРАТ
Полезная модель относится к устройствам для определения местоположения (текущих координат, высоты, скорости и времени) путем определения в системе координат вектора направления до базовой станции, установленной в точке с известными координатами по сигналам спутниковых радионавигационных сие тем (СРНС). Данная модель может быть использована в локальных системах дифференциальной коррекции (ЛСДК), для высокоточного определения координат различных объектов в зоне действия базовой станции ЛСДК.
Технический результат, получаемый при использовании полезной модели, заключается в существенном повышении точности определения местоположения (до сантиметра), при упрощении конструкции приемника, и увеличении производительности труда, за счет вывода на устройство отображения информации вычисленных координат в режиме реального времени
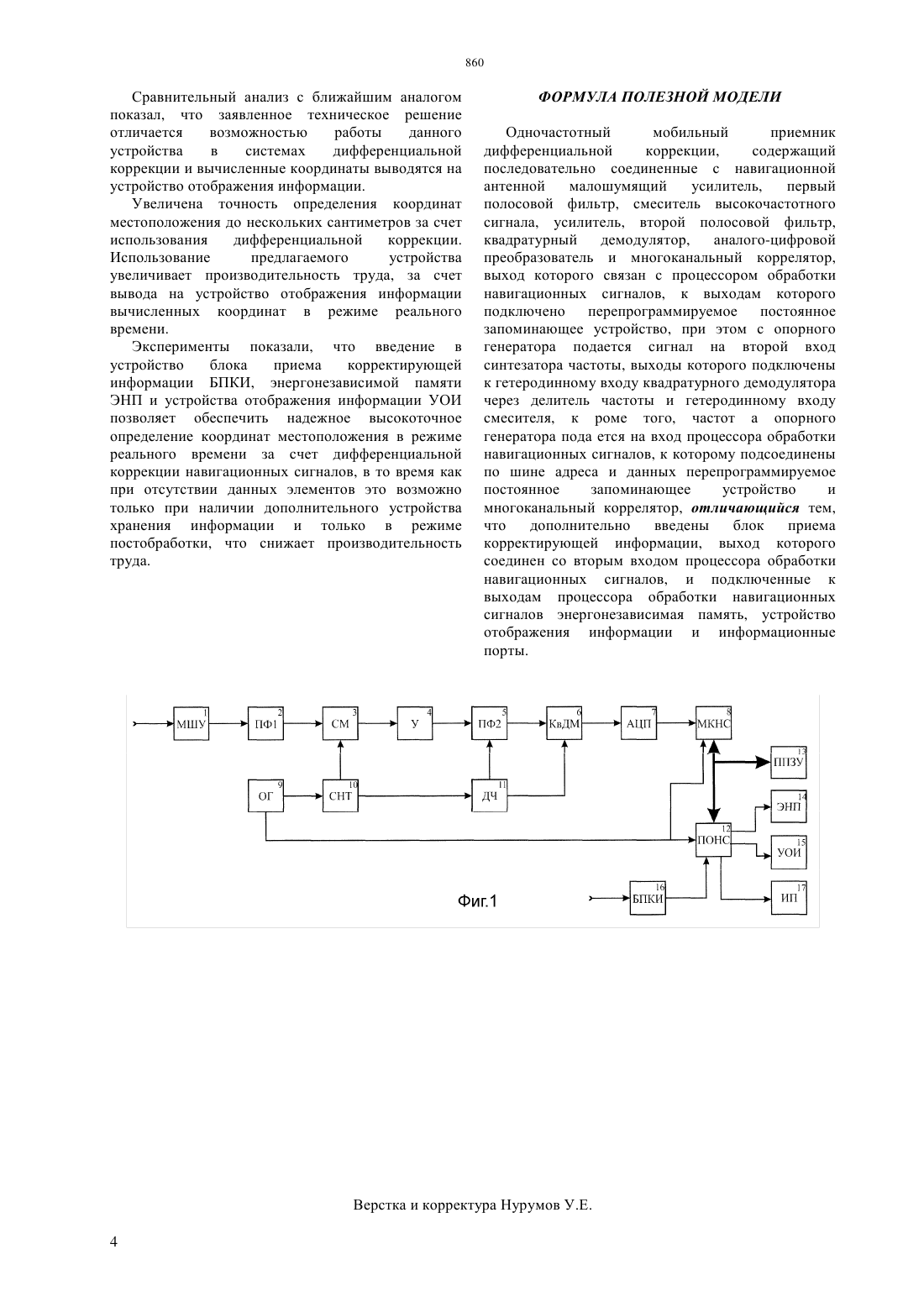
Предложено устройство, включающее последовательно соединенные с навигационной антенной малошумящий усилитель (МШУ), первый полосовой фильтр (ПФ1), смеситель высокочастотного сигнала (СМ), усилитель (У), второй полосовой фильтр (ПФ2), квадратурный демодулятор (КвДМ), аналого-цифровой преобразователь (ЛЦП) и многоканальный коррелятор навигационных сигналов (МКНС). С опорного генератора ЮГ) подается сигнал в синтезатор частоты (СНГ), выходы которого подключены к гетеродинному входу смесителя, гетеродинному входу квадратурного демодулятора через делитель час-готы (/J4) и к первому входу процессора обработки навигационных сигналов (ПОПС). Выход многоканального коррелятора соединен с процессором обработки навигационных сигналов (ПОПС), к которому подключены перепрограммируемое постоянное запоминающее устройство (НИЗУ), энергонезависимая память (ЭНП), устройство отображения информации (УОИ) и информационные порты. Третий вход процессора обработки навигационных сигналов связан с блоком приема корректирующей информации (БПКИ).
Текст
(51) 01 5/02 (2011.01) КОМИТЕТ ПО ПРАВАМ ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ МИНИСТЕРСТВА ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ПОЛЕЗНОЙ МОДЕЛИ К ПАТЕНТУ местоположения (до сантиметра), при упрощении конструкции приемника,и увеличении производительности труда, за счет вывода на устройство отображения информации вычисленных координат в режиме реального времени. Предложено устройство,включающее последовательно соединенные с навигационной антенной малошумящий усилитель (МШУ), первый полосовой фильтр(АЦП) и многоканальный коррелятор навигационных сигналов (МКНС). С опорного генератора (ОГ) подается сигнал в синтезатор частоты (СНТ), выходы которого подключены к гетеродинному входу смесителя,гетеродинному входу квадратурного демодулятора через делитель частоты (ДЧ) и к первому входу процессора обработки навигационных сигналов(ПОНС). Выход многоканального коррелятора соединен с процессором обработки навигационных сигналов (ПОНС), к которому подключены перепрограммируемое постоянное запоминающее устройство (ППЗУ), энергонезависимая память(ЭНП), устройство отображения информации (УОИ) и информационные порты. Третий вход процессора обработки навигационных сигналов связан с блоком приема корректирующей информации (БПКИ).(72) Ахмедов Даулет Шафигуллович Шабельников Евгений Алексеевич Молдабеков Мейрбек(73) Дочернее Товарищество с ограниченной ответственностью Институт космической техники и технологий Товарищество с ограниченной ответственностью(54) ОДНОЧАСТОТНЫЙ МОБИЛЬНЫЙ ПРИЕМНИК ДИФФЕРЕНЦИАЛЬНОЙ КОРРЕКЦИИ(57) Полезная модель относится к устройствам для определения местоположения(текущих координат, высоты, скорости и времени) путем определения в системе координат вектора направления до базовой станции, установленной в точке с известными координатами по сигналам спутниковых радионавигационных систем (СРНС). Данная модель может быть использована в локальных системах дифференциальной коррекции(ЛСДК), для высокоточного определения координат различных объектов в зоне действия базовой станции ЛСДК. Технический результат,получаемый при использовании полезной модели, заключается в существенном повышении точности определения Полезная модель относится к устройствам для определения местоположения (текущих координат,высоты, скорости и времени) путем определения в системе координат вектора направления до базовой станции, установленной в точке с известными координатами по сигналам спутниковых радионавигационных систем (НС). Данная модель может быть использована в локальных системах дифференциальной коррекции (ЛСДК),для высокоточного определения координат различных объектов в зоне действия базовой станции ЛСДК. Из уровня техники известен программноаппаратный Глонасс/ приемник (Патент 80806, кл. 01 5/02, 01 5/14, 2009), содержащий антенный разъем,малошумящий усилитель,ГЛОНАСС ирадиочастотные модули, схему исключающего ИЛИ для проверки синхронизации радиочастотных модулей, генератор опорного колебания радиочастотных модулей,микроконтроллер, обеспечивающий управление радиочастотными модулями и датчиками инерциальной системы,принимающий оцифрованные отсчеты входного сигнала и информацию с датчиков и передающий их по интерфейсу 2.0 через выходной разъем на компьютер,генератор опорного колебания микроконтроллера, флэш-ПЗУ для хранения программы микроконтроллера. Данный приемник относится к устройствам радиоэлектроники и может быть использовано для приема навигационных сигналов ГЛОНАСС и . Недостаток известного устройства заключается в том, что оно имеет в своем составе инерциальные датчики, а, как известно, инерциальные датчики имеют свойство накопления ошибки, что со временем может привести к недопустимому снижению точности определения координат. Помимо этого, известное устройство работает в автономном режиме, а, следовательно, имеет стандартную для таких устройств точность определения координат в несколько метров. Известен также Глонасс// приемник,(Патент 83342, кл. 01 5/02, 01 5/14,2009),включающий антенный разъем,малошумящий усилитель, полосовой фильтр,делитель мощности ГЛОНАСС и / радиочастотные модули, генератор опорного колебания радиочастотных модулей и СБИС,датчики инерционной системы, блоки корреляторов ГЛОНАСС и/,дециматор,принимающие оцифрованные отсчеты с выхода радиочастотных модулей,контроллер,обеспечивающий управление радиочастотными модулями,преобразователь интерфейса,универсальный асинхронный приемопередатчик,причем блоки корреляторов ГЛОНАСС и/,дециматор,контроллер,преобразователь интерфейса и универсальный асинхронный приемопередатчик реализованы аппаратно на СБИС, в качестве которой может выступать программируемая логическая интегральная схема (ПЛИС/) или заказная 2,процессор,принимающий выходные данные от блоков корреляторов, дециматора и информацию от датчиков инерционной системы и решающий навигационную задачу и передающий результаты ее решения через преобразователь интерфейса и универсальный асинхронный приемопередатчик из устройства,генератор опорного колебания процессора, флэш-ПЗУ для хранения программы процессора. В приемнике использован принцип одинарного преобразования частоты с помощью квадратурных смесителей, при этом обеспечено эффективное разделение сигналов ГЛОНАСС и/ аналоговыми средствами, что позволяет упростить цифровую часть приемника, с обработкой принятых сигналов при помощи аппаратно реализованных блоков корреляторов ГЛОНАСС и / и процессора, а также датчиков инерциальной системы, что обеспечивает повышение точности навигации и устойчивости навигационных определений в сложных условиях приема спутниковых сигналов. Но и это устройство имеет те же недостатки что и первый аналог и не способно гарантированно определять координаты измеряемых объектов с дециметровой и сантиметровой точностью. Наиболее близким к заявляемому изобретению по совокупности признаков является навигационный приемник (Патент 2388009,кл. 01 5/14, 2010), содержащий многоканальный коррелятор с двумя независимыми блоками быстрого обнаружения и универсальными каналами,малошумящий усилитель, три полосовых фильтра,смеситель и усилитель с дифференциальными выходами, два квадратурных демодулятора, два АЦП, опорный генератор, два синтезатора частоты,процессор обработки навигационных сигналов,многоканальный коррелятор, перепрограммируемое постоянное запоминающее устройство. Устройство предназначено для определения местоположения(текущих координат, высоты, скорости и времени) путем определения в одной системе координат абсолютных расстояний до нескольких разнесенных точек с известным местоположением по сигналам спутниковых радионавигационных систем (СРНС), а также приема и использования корректирующей информации геостационарных спутников для повышения точности местоопределения. К недостаткам этого устройства относится то,что для его полнофункциональной работы необходимо получать корректирующую информацию геостационарных спутников для повышения точности местоопределения, причем корректирующую информацию формирует сеть базовых станций, которые рассредоточены по обширной территории. Также для работы данного приемника необходимо получать сигналы по двум частотам, что приводит к удорожанию приемника,кроме того, устройство имеет весьма сложную конструкцию. Технической задачей настоящей полезной модели является создание одночастотного мобильного приемника сигналов СРНС с использованием корректирующей информации от базовой станции для повышения точности определения местоположения, а также упрощение структурной схемы устройства. Технический результат,получаемый при использовании полезной модели, заключается в существенном повышении точности определения местоположения (до сантиметра), при упрощении конструкции приемника,и увеличении производительности труда, за счет вывода на устройство отображения информации вычисленных координат в режиме реального времени. Указанный технический результат достигается тем, что предлагаемый одночастотный мобильный приемник дифференциальной коррекции так же, как известное устройство, включает последовательно соединенные с навигационной антенной малошумящий усилитель, первый полосовой фильтр, смеситель высокочастотного сигнала,усилитель, второй полосовой фильтр, квадратурный демодулятор, АЦП и многоканальный коррелятор,выход которого связан с процессором обработки навигационных сигналов, к выходам которого подключено перепрограммируемое постоянное запоминающее устройство. С опорного генератора подается сигнал на второй вход синтезатора частоты, выходы которого подключены к гетеродинному входу квадратурного демодулятора через делитель частоты и гетеродинному входу смесителя. Кроме того, частоту опорного генератора подают на вход процессора обработки навигационных сигналов, к которому подсоединены по шине адреса и данных перепрограммируемое постоянное запоминающее устройство и многоканальный коррелятор. Однако в отличие от известного устройства для достижения указанного технического результата согласно предлагаемой полезной модели внесены изменения, а именно дополнительно введены блок приема корректирующей информации, выход которого соединен со вторым входом процессора обработки навигационных сигналов,и подключенные к выходам процессора обработки навигационных сигналов энергонезависимая память,устройство отображения информации и информационные порты. Для лучшего понимания сущность предлагаемой полезной модели далее поясняется с привлечением графического материала. На чертеже приведена структурная схема предлагаемой полезной модели. Одночастотный мобильный приемник дифференциальной коррекции (фиг.1) включает последовательно соединенные с навигационной антенной малошумящий усилитель (МШУ) 1,первый полосовой фильтр (ПФ 1) 2, смеситель высокочастотного сигнала (СМ) 3, усилитель (У) 4,второй полосовой фильтр (ПФ 2) 5, квадратурный демодулятор(КвДМ) 6,аналого-цифровой преобразователь (АЦП) 7 и многоканальный коррелятор навигационных сигналов (МКНС) 8. С опорного генератора (ОГ) 9 подается сигнал в синтезатор частоты (СНТ) 10, выходы которого подключены к гетеродинному входу смесителя 3,гетеродинному входу квадратурного демодулятора 6 через делитель частоты (ДЧ) 11 и к первому входу процессора обработки навигационных сигналов(ПОНС) 12. Выход многоканального коррелятора 8 соединен с процессором обработки навигационных сигналов (ПОНС) 12, к которому подключены перепрограммируемое постоянное запоминающее устройство (ППЗУ) 13, энергонезависимая память(УОИ) 15 и информационные порты 17. Третий вход процессора обработки навигационных сигналов 12 связан с блоком приема корректирующей информации (БПКИ) 16. Предлагаемый одночастотный мобильный приемник дифференциальной коррекции работает следующим образом. Через антенный вход приемника,предназначенный для приема сигналов спутниковой радионавигационной системы (СРНС), на МШУ 1 поступают навигационные сигналы от спутников,находящихся в зоне видимости. МШУ 1 усиливает входной сигнал, внося минимальную шумовую составляющую. В первом полосовом фильтре 2 выделяют высокочастотный сигнал с требуемым диапазоном частот и передают на первый вход смесителя 3 высокочастотного сигнала, на другой вход которого поступает сигнал промежуточной частоты от СНТ 10. С выхода СМ 3 выделенный сигнал с частотой 1 поступает на усилитель 4. С выхода усилителя 4 сигнал податся в первый вход второго полосового фильтра ПФ 2 5, при этом на второй вход ПФ 2 подается опорный сигнал с ДЧ 11. В ПФ 2 5 выделяется требуемый диапазон частот, в КвДМ 6 приходящий сигнал усиливается,преобразуется в сигнал частоты 2, выделяются действительная и мнимая составляющие сигнала и через комплексный выход КвДМ 6 передаются на вход АЦП 7, а затем и на вход многоканального коррелятора 8. Выделение действительной и мнимой составляющих дает возможность обрабатывать сигналы, частота которых близка к нулю, и производить наиболее точную обработку сигнала в цифровом тракте. При включении приемника запускается штатное программное обеспечение ПОНС 12, находящееся в ППЗУ 13. В соответствии с алгоритмом его работы процессор управляет работой МКНС 8, решает основную навигационную задачу - определение местоположения, решает задачу дифференциальной коррекции навигационных сигналов, производит сохранение принимаемых и рассчитанных данных в ЭНП 14, а также осуществляет изменение установок работы приемника и обмен данными с потребителем через информационные порты 17. При наличии корректирующей информации, она попадает в БПКИ 16, где происходит ее декодирование и предварительная обработка, после чего эта информация поступает в процессор 12 для решения задачи дифференциальной коррекции. На УОИ 15 отображаются вычисленные координаты местонахождения. Сравнительный анализ с ближайшим аналогом показал, что заявленное техническое решение отличается возможностью работы данного устройства в системах дифференциальной коррекции и вычисленные координаты выводятся на устройство отображения информации. Увеличена точность определения координат местоположения до нескольких сантиметров за счет использования дифференциальной коррекции. Использование предлагаемого устройства увеличивает производительность труда, за счет вывода на устройство отображения информации вычисленных координат в режиме реального времени. Эксперименты показали, что введение в устройство блока приема корректирующей информации БПКИ, энергонезависимой памяти ЭНП и устройства отображения информации УОИ позволяет обеспечить надежное высокоточное определение координат местоположения в режиме реального времени за счет дифференциальной коррекции навигационных сигналов, в то время как при отсутствии данных элементов это возможно только при наличии дополнительного устройства хранения информации и только в режиме постобработки, что снижает производительность труда. ФОРМУЛА ПОЛЕЗНОЙ МОДЕЛИ Одночастотный мобильный приемник дифференциальной коррекции,содержащий последовательно соединенные с навигационной антенной малошумящий усилитель,первый полосовой фильтр, смеситель высокочастотного сигнала, усилитель, второй полосовой фильтр,квадратурный демодулятор,аналого-цифровой преобразователь и многоканальный коррелятор,выход которого связан с процессором обработки навигационных сигналов, к выходам которого подключено перепрограммируемое постоянное запоминающее устройство, при этом с опорного генератора подается сигнал на второй вход синтезатора частоты, выходы которого подключены к гетеродинному входу квадратурного демодулятора через делитель частоты и гетеродинному входу смесителя, к роме того, частот а опорного генератора пода ется на вход процессора обработки навигационных сигналов, к которому подсоединены по шине адреса и данных перепрограммируемое постоянное запоминающее устройство и многоканальный коррелятор, отличающийся тем,что дополнительно введены блок приема корректирующей информации, выход которого соединен со вторым входом процессора обработки навигационных сигналов, и подключенные к выходам процессора обработки навигационных сигналов энергонезависимая память, устройство отображения информации и информационные порты.
МПК / Метки
МПК: G01S 5/02
Метки: коррекции, дифференциальной, приемник, одночастотный, мобильный
Код ссылки
<a href="https://kz.patents.su/4-u860-odnochastotnyjj-mobilnyjj-priemnik-differencialnojj-korrekcii.html" rel="bookmark" title="База патентов Казахстана">Одночастотный мобильный приемник дифференциальной коррекции</a>
Локальная система дифференциальной коррекции
Номер полезной модели: 837
Опубликовано: 15.08.2012
Авторы: Шабельников Евгений Алексеевич, Ахмедов Даулет Шафигуллович, Молдабеков Мейрбек
МПК: G01S 5/14
Метки: дифференциальной, коррекции, система, локальная
Формула / Реферат:
Р Е ФЕPATПолезная модель относится к конструктивному выполнению средств определения местоположения подвижного объекта с помощью сетевых спутниковых радионавигационных систем (СРНС) типа «НЛВСТЛР» и «ГДОНАСС», и может быть использована для коррекции радионавигационных параметров путем передачи корректирующей информации.Технический результат, получаемый при использовании полезной модели, заключается в существенном повышении функциональности,...
Устройство адаптивной синхронизации
Номер предварительного патента: 13087
Опубликовано: 15.05.2003
Авторы: Мороз Юрий Владимирович, Михайлов Сергей Михайлович, Некрасов Александр Аркадьевич, Васильев Иван Вениаминович, Коваль Олег Викторович, Огарков Виталий Александрович
МПК: H04B 1/10
Метки: адаптивной, синхронизации, устройство
Формула / Реферат:
Изобретение относится к радиотехнике, в частности к технике приема и обработки сигналов, и может быть использовано в устройствах для выделения слабых, циклически повторяющихся сигналов на фоне помех. Устройство адаптивной синхронизации содержит полосовой фильтр, вход которого является входом устройства, а выход соединен с входом порогового блока, выход которого подключен к входу первого счетчика, а вход управления - к первому выходу процессора...
Устройство управления многофункциональным аппаратом для электрофизиотерапии
Номер предварительного патента: 131
Опубликовано: 20.12.1993
Авторы: Саламатин Альберт Гергардович, Мамонтов Яков Яковлевич, Карлинский Мирон Владленович, Финк Владимир Николаевич, Медведев Яков Вениаминович
МПК: A61N 1/08
Метки: устройство, электрофизиотерапии, управления, аппаратом, многофункциональным
Формула / Реферат:
Изобретение относится к медицинской технике и может быть использовано в приборах многофункциональной электрофизиотерапии. Для увеличения точности дозирования электрофизиотерапевтического воздействия путем повышения степени соответствия сигнала воздействия заданному сигналу в него введены соединенные последовательно цифровой процессор обработки аналоговых сигналов и преобразователь "напряжение-ток", выход которого подключен ко второму...
Реоплетизмограф
Номер предварительного патента: 9790
Опубликовано: 15.01.2001
Авторы: Ивель Виктор Петрович, Мутанов Галым Мутанович
МПК: A61B 5/02
Метки: реоплетизмограф
Формула / Реферат:
Изобретение относится к медицинской технике, а именно к приборам для функциональной диагностики, и может быть использовано для исследования сосудистой системы человека.Реоплетизмограф содержит управляемый генератор зондирующего тока, резистор, избирательный фильтр, токовые электроды и потенциометрические электроды, подключенные к биообъекту, регистратор, последовательно соединенные первый усилитель высокой частоты, первый детектор, первый...
Устройство для дифференциальной защиты преобразователя
Номер предварительного патента: 3339
Опубликовано: 10.06.1996
Авторы: Копырин Владимир Сергеевич, Марковский Вадим Павлович
МПК: H02H 7/12
Метки: дифференциальной, преобразователя, защиты, устройство
Формула / Реферат:
Изобретение относится к преобразовательной технике, а именно к устройствам защиты полупроводниковых преобразователей.Технический результат изобретения - повышение надежности.Устройство для дифференциальной защиты преобразователя, снабженное на входе блоком коммутации и трансформатором, содержащее датчик переменного тока, подключенные к выходу выпрямителя, с нелинейным элементом, к которому подключена цепь из бесконтактных ключей, резистора и...
Предыдущий патент: Передвижная лаборатория для обслуживания и ремонта топливной аппаратуры дизельных двигателей
Следующий патент: Терминал для проведения продажи и розыгрыша лотерейных билетов
Случайный патент: Механизм для плоского программированного перемещения изделия