Устройство диагностики трубопроводов с двойным спиральным набором электромагнитных акустических датчиков
Номер патента: 25439
Опубликовано: 16.01.2012
Авторы: Саид М. Али, Джон Х. Флора, Джед Ладлоу, Хьюдонг Гао, Джеймс Симек
Формула / Реферат
Устройство диагностики трубопроводов включает в себя два полюсных магнита, расположенных под углом к центральной продольной оси корпуса устройства. Ряд комплектов сенсорных обмоток расположен между противоположных концов двухполюсных магнитов, и перпендикулярно центральной продольной оси. Каждый комплект сенсорных обмоток включает в себя излучающую обмотку и две пары приемных обмоток, предназначенных для получения отраженных сигналов от стенки трубчатого элемента. Из-за того, что линия сенсорных обмоток повернута относительно подмагничивающего поля, приемные обмотки находятся на одной линии, и имеют такой же угол наклона, что и излучающая обмотка. Устройство обеспечивает повышенную чувствительность к дефектам малого размера, значительно уменьшены требования к питанию генератора радиочастотных импульсов, устройство обеспечивает полное круговое охватывание, самостоятельную калибровку передаваемых сигналов и уменьшение интерференции между излучающими обмотками, вызванных акустическим окружением.
Текст
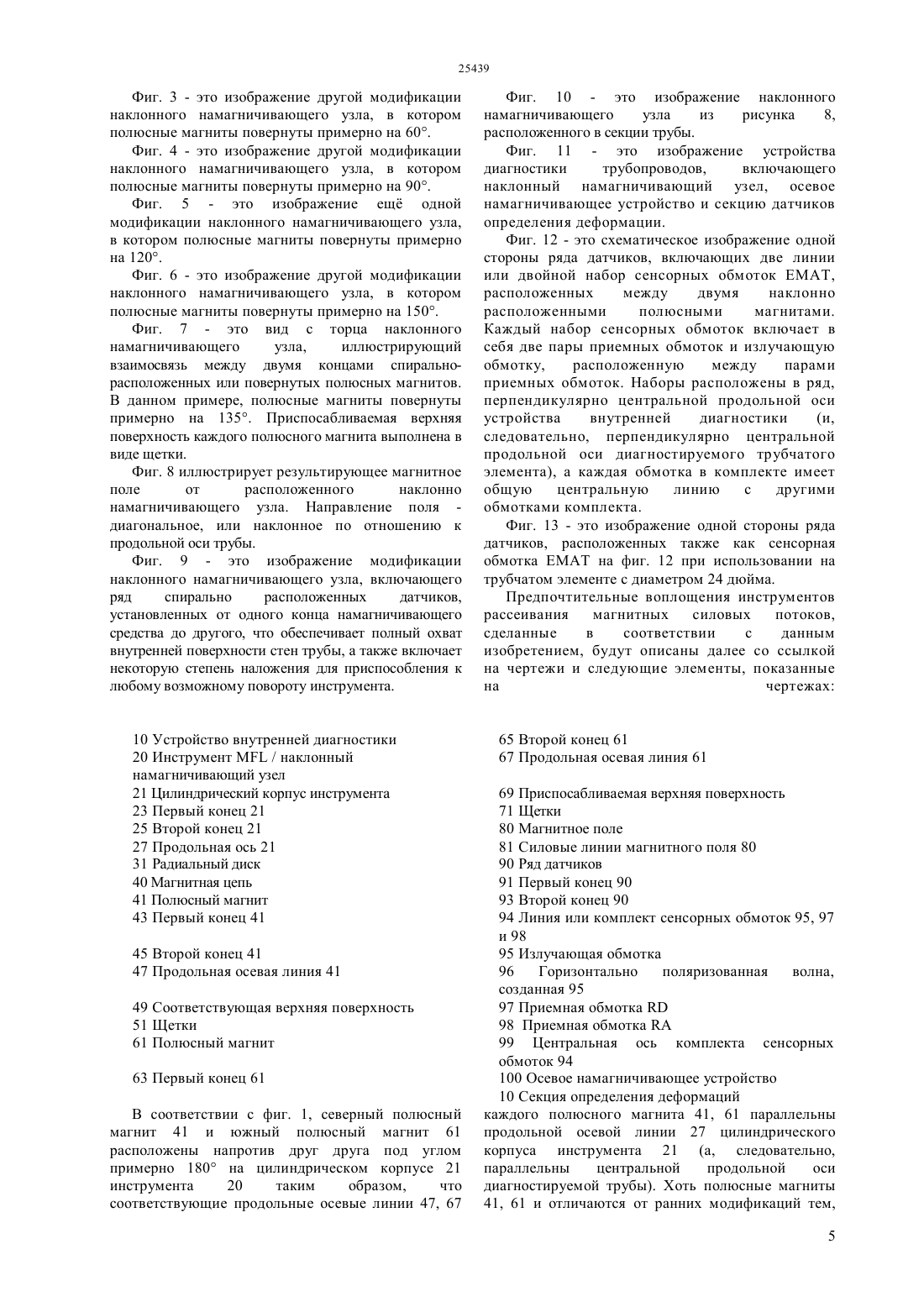
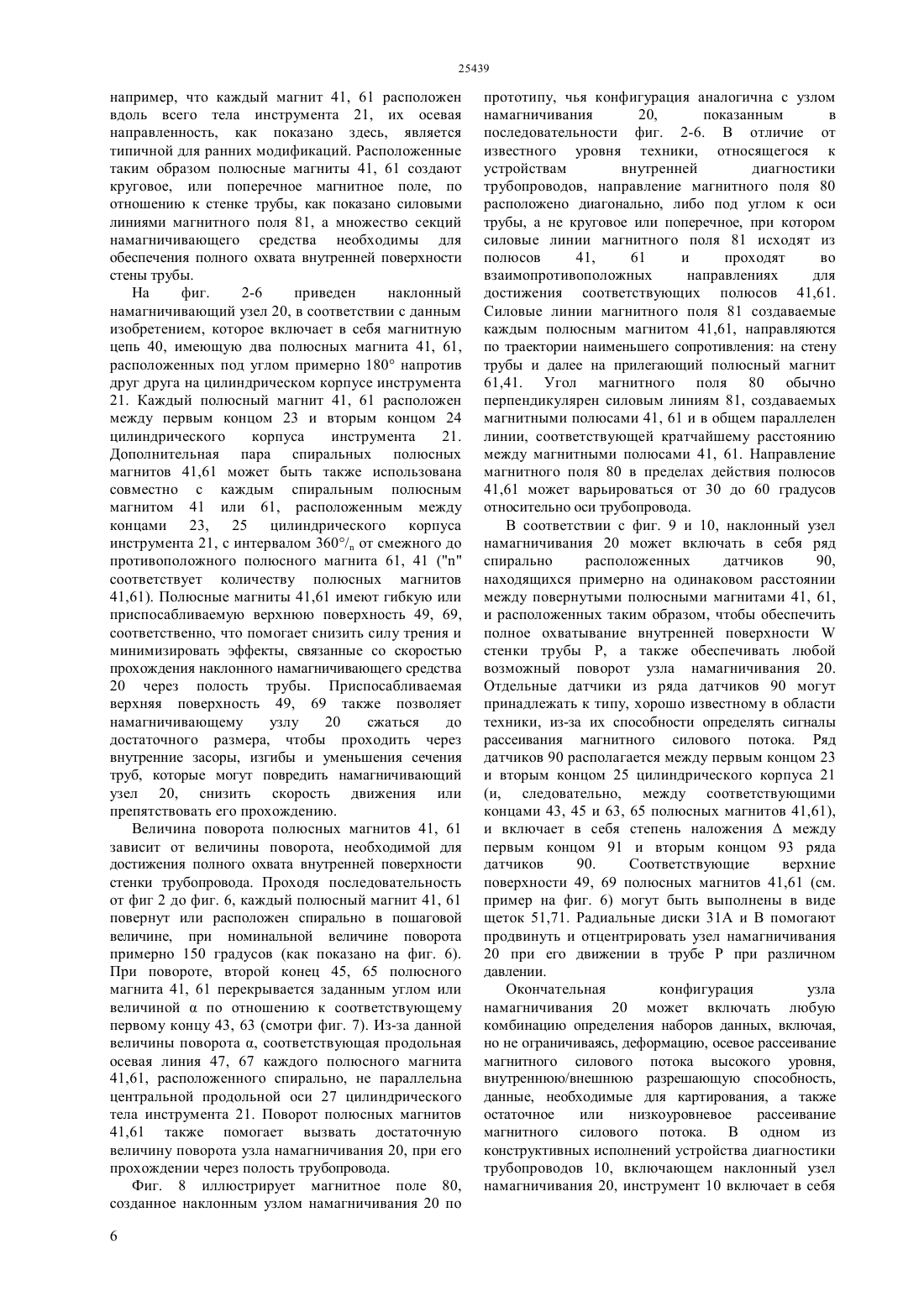
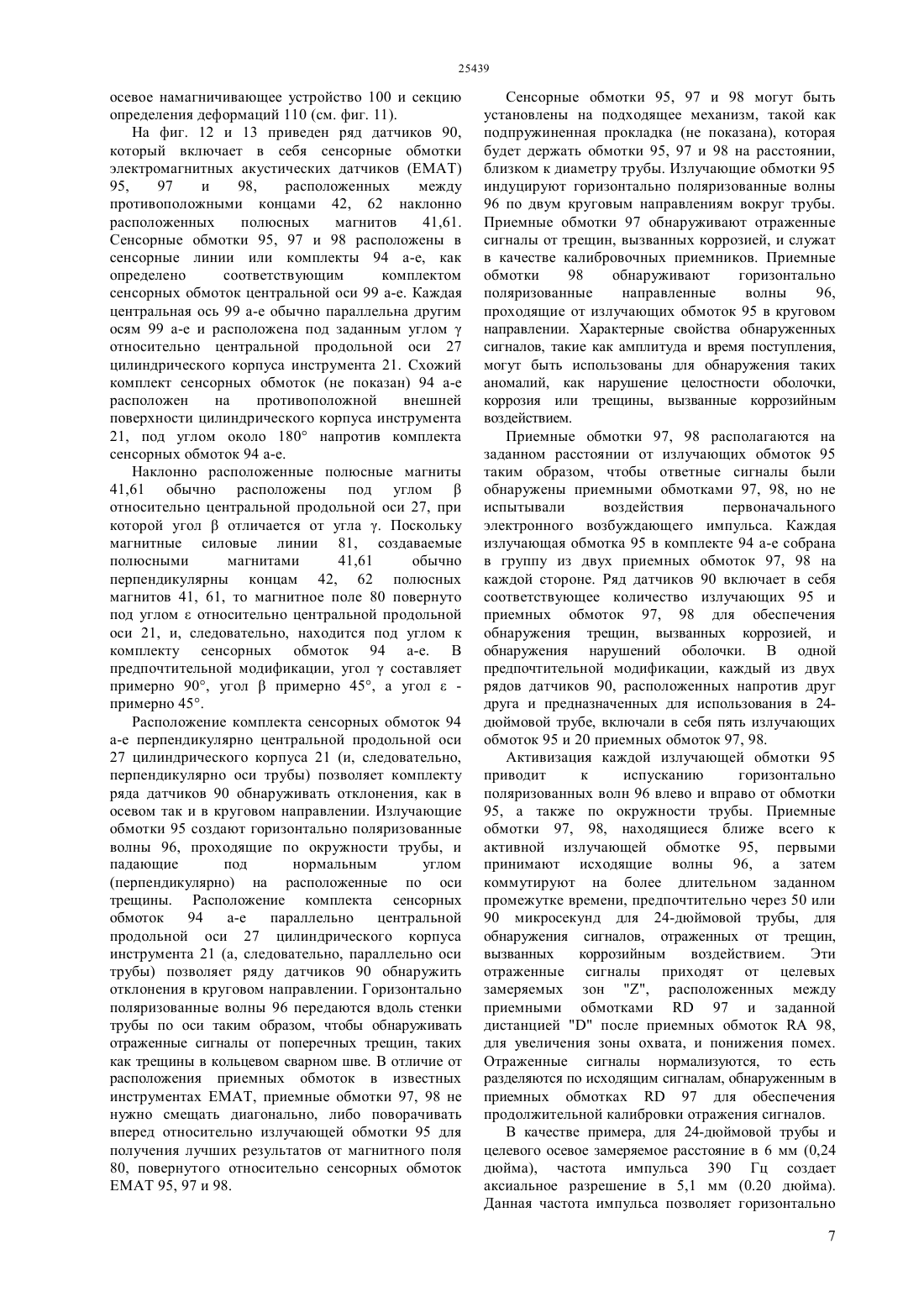
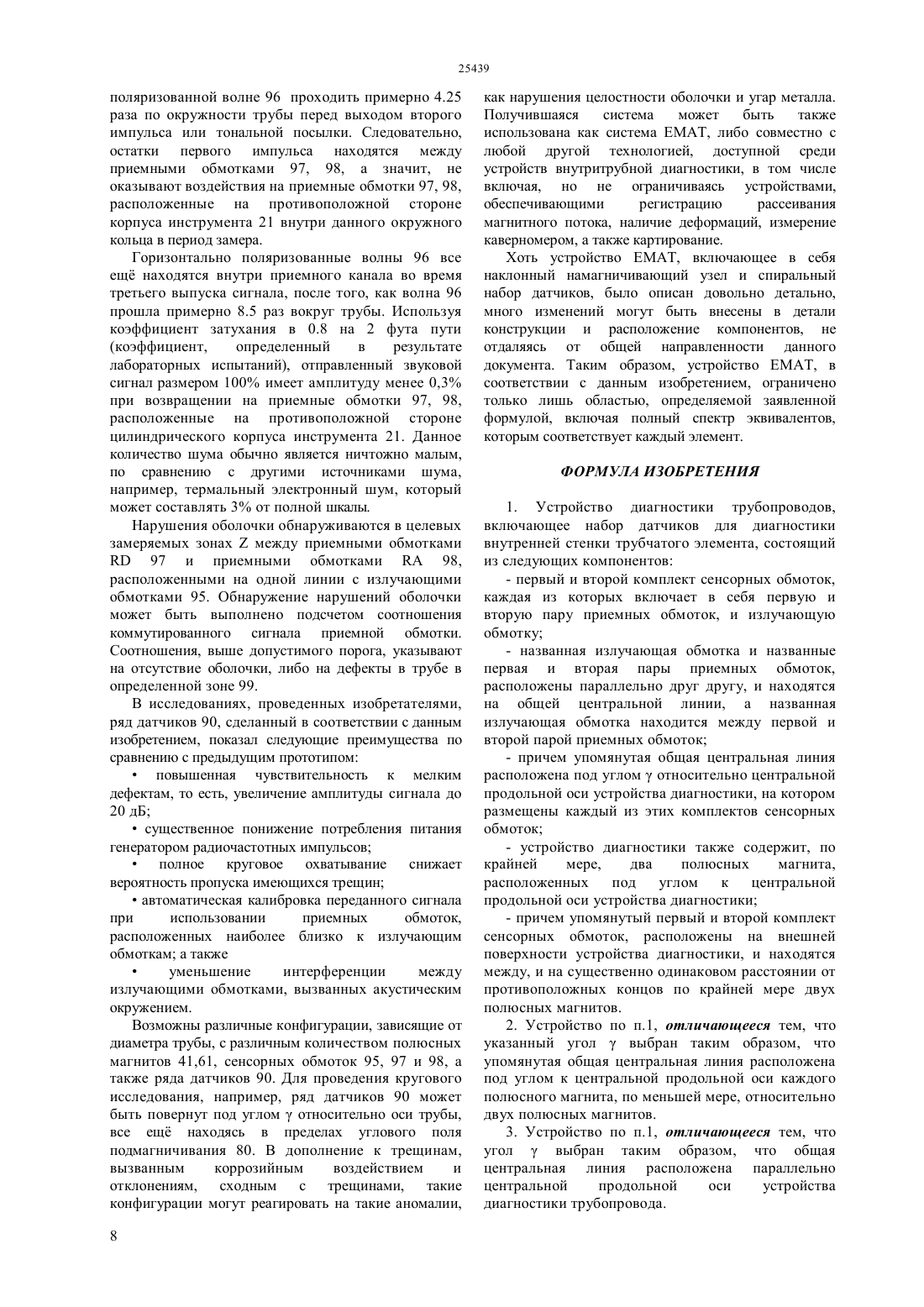
(51) 01 29/04 (2010.01) 01 29/24 (2010.01) КОМИТЕТ ПО ПРАВАМ ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ МИНИСТЕРСТВА ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ПАТЕНТУ расположенных под углом к центральной продольной оси корпуса устройства. Ряд комплектов сенсорных обмоток расположен между противоположных концов двухполюсных магнитов,и перпендикулярно центральной продольной оси. Каждый комплект сенсорных обмоток включает в себя излучающую обмотку и две пары приемных обмоток,предназначенных для получения отраженных сигналов от стенки трубчатого элемента. Из-за того, что линия сенсорных обмоток повернута относительно подмагничивающего поля, приемные обмотки находятся на одной линии, и имеют такой же угол наклона, что и излучающая обмотка. Устройство обеспечивает повышенную чувствительность к дефектам малого размера, значительно уменьшены требования к питанию генератора радиочастотных импульсов, устройство обеспечивает полное круговое охватывание,самостоятельную калибровку передаваемых сигналов и уменьшение интерференции между излучающими обмотками,вызванных акустическим окружением.(74) Шабалина Галина Ивановна Шабалин Владимир Иванович Кучаева Ирина Гафиятовна(54) УСТРОЙСТВО ДИАГНОСТИКИ ТРУБОПРОВОДОВ С ДВОЙНЫМ СПИРАЛЬНЫМ НАБОРОМ ЭЛЕКТРОМАГНИТНЫХ АКУСТИЧЕСКИХ ДАТЧИКОВ(57) Устройство диагностики трубопроводов включает в себя два полюсных магнита, 25439 Данное изобретение преимущественно относится к устройствам диагностики, разработанным для определения аномалий в трубах и трубопроводах, и,в частности, относится к устройствам внутренней диагностики труб, использующим технологию определения рассеивания магнитного силового потока (- ). Многие из установленных трубопроводов могут быть диагностированы при использовании технологии рассеивания магнитного потока, в основном с целью нахождения аномалий, связанных с угаром металла. Было показано, что рассеивание магнитного потока,как и предполагалось, реагировало на отклонения в стенках трубопровода, поскольку главная ось угара металла и угол магнитного поля различны. Для подтверждения данного эффекта были использованы результаты экспериментов и моделирования, что также подробно описывается в литературе. В частности, в связи с ограничениями,продиктованными получением, хранением данных и строением магнитных схем, в большинстве внутренних устройств диагностики используются намагничивающие средства ориентированные вдоль оси (см. например, Патент США . 6,820,653 выданный.). Однако, существующие конструкции осевых средств намагничивания затрудняют распознавание и определении количества чрезвычайно малых осевых характеристик, что в некоторых случаях становится даже невозможным. Для определения характеристик такого типа поставщики услуг по диагностике трубопроводов за последние десять лет поставили на рынок и запустили в эксплуатацию устройства, использующие магнитное поле кольцевого или поперечного направления. Однако,из-за физических ограничений,производительность и точность подобных инструментов диагностики рассеивания поперечного магнитного потока (- ) в общем меньше, чем у осевых устройств для аномалий, связанных с угаром металла. Кроме того, для устройствобычно требуется как минимум два узла намагничивающих средств,для того, чтобы достичь адекватного охвата, что создает препятствия и трудности для их использования в существующих осевых устройствах. Для тех трубопроводов, которые могут иметь чрезвычайно малую величину угара металла, либо для некоторых типов отклонений роликовых сварных швов, стандартные осевые устройства не создают требуемых возможностей их определения и подсчета. В таком случае, при использовании устройствпроводятся либо первоначальные,либо дополнительные исследования с использованием инструментов . Хоть инструментыи способны определять чрезвычайно малые аномалии,связанные с угаром, а также и некоторые отклонения роликовых сварных швов, они также определяют все остальные детали объемного угара металла, обычно происходящие в трубопроводе, что усложняет процесс определения типов аномалий. Одно из самых первых устройств, использующих выданном. Патент использует пару электромагнитов, расположенных перпендикулярно друг другу, с датчиками, такими как магнитометры или измерительные обмотки, расположенными на каждой стороне магнитов. Кроме использования постоянных магнитов и датчиков, типа датчиков Холла, указанное расположение остатся основой для большинства современных реализаций подобного оборудования. К тому же, в некоторых конструкциях используются разделенные на части или отдельные дискретные магниты, которые, чаще всего, сохраняют поперечное или круговое направление поля. Например, в патенте США . 3,786,684, выданном., описывается расположение отдельных магнитов рядами наклонно по отношению к оси трубы, с полями каждого ряда, расположенными перпендикулярно другим. Однако,такое расположение разделяет поле по частям и областям между полюсами каждого отдельного магнита. Кроме того, небольшой интервал между полюсами,необходимый в данном случае, уменьшает длину магнитопровода, что приводит к тому, что инструмент испытывает влияние скорости, а также перекрывает,искажает и занижает данные о качестве сварных швов, вмятин и других аномалий. В других конструкциях используются тщательно разработанная геометрия комплекса, множество секций намагничивающего устройства, а также продуманные механические устройства, такие как винтовые приводы, зубчатые передачи и колеса,спроектированные для обеспечения спирального или винтового движения секции намагничивающего средства. Например, Патент США . 5,565,633,выданный , описывает механически сложное устройство для использования с секциями намагничивающего средства, имеющего две или более магнитных цепи и большое количество датчиков. В одной из модификаций магнитные блоки расположены спирально, с полюсами, находящимися параллельно. В другой модификации, магнитные блоки являются изогнутыми парами полюсов,расположенных аксиально. В обоих случаях для достижения полного охвата внутренней поверхности трубы требуется механическое вращение. Патент США . 6,100,684, выданный , описывает,по сути,поперечное расположение поля намагничивания, использующее множество секций средства намагничивания и сложное расположение колес для приведения секции в спиральное движение и перекрывания или полного охвата стенок трубы. Устройство по патенту США . 7,548,059,выданное., включает в себя две направляющие, содержащие закрепленные магниты,расположенные попарно на близком расстоянии для создания номинального поперечного поля,расположенного спирально вокруг трубы. Для данного устройства, включающего в себя множество движущихся частей, таких как поддерживающая арматура,шкивы и пружины,характерно дополнительное усложнение конструкции, чтобы он был достаточно гибок для приспосабливания к изгибам трубопровода. Кроме того, магниты в данном типе расположения создают поле между двумя параллельными полюсами, формируя единую закрытую кольцевую цепь между полюсами отдельных дискретных магнитных блоков. Также как и в последнем случае, магниты,описанные в уровне техники, описаны как представленные в виде блоков, без указания на изогнутую или приспосабливаемую верхнюю поверхность, используемую в магнитных блоках. Использование жесткого контакта для магнитной цепи понижает качество данных, за счет воздушных зазоров или зон с переменным магнитным сопротивлением в магнитном поле на вмятинах или вдоль сварных швов и других отклонений, которые могут находиться внутри трубы. Для некоторых типов аномалий помехи, созданные в рассеянном поле,перекрывают или иным образом искажают представляющие интерес сигналы магнитного рассеивания. Любые магнитные отклонения,существующие во вмятинах и зонах сварных швов,имеют огромное значение по причине их присутствия в данных зонах, и, следовательно, представляют области, в которых качество данных является наиболее важным. Кроме того, известный уровень техники требует использования большого количества полюсов или поверхностей, находящихся в непосредственном контакте с поверхностью стенок трубы. Подобное расположение может привести к чрезвычайно высоким силам трения или сопротивлению движению, которое испытывает узел рассеивания магнитного силового потока, таким образом, препятствуя или исключая его использование там, где необходимо низкое трение. Как уже говорилось ранее, в настоящее время операторы могут проводить диагностику установленных трубопроводов, используя технологию определения рассеивания магнитного потока , в основном для нахождения аномалий, связанных с угаром металла. Однако, для некоторых видов аномалий существующие конструкции осевых намагничивающих устройств, используемые в технологии , затрудняют распознавание и определение количества чрезвычайно малых осевых характеристик и порой даже делают их невозможными. Для определения и подсчета таких характеристик были исследованы или использованы другие технологии, с использованием акустических(ультразвуковых) волн. Такие акустические волны обычно вырабатываются внешними пьезоэлектрическими датчиками,либо электромагнитными акустическими датчиками(-- ). Обычно устройства, использующиебывают одного из двух основных типов Лоренца и магнитострикционные. Для обоих типов необходимо присутствие внешнего поля подмагничивания. В ЕМАТ типа Лоренца, поле подмагничивания ориентировано перпендикулярно стенке трубы, и взаимодействует с силовыми линиями,индуцированными вихревыми потоками, либо с деформациями в стенке трубы. В магнитострикционном типе ЕМАТ используется поле подмагничивания, находящееся в плоскости стенки трубы, по оси или по окружности и взаимодействует с магнитно-индуцированными деформациями. В технологии неразрушающих испытаний хорошо известно, что магнитострикция в стали гораздо более эффективна при создании горизонтально поляризованных акустических волн, когда поле подмагничивания находится под углом относительно проводников сенсорной обмотки ЕМАТ. Этот результат был подтвержден изобретателями при первоначальной разработке ряда датчиков ЕМАТ в соответствии с данным изобретением. Во время исследования было обнаружено, что несколько механически нанесенных на испытательных пластинах меток не обнаруживались при использовании осевого поля подмагничивания. Поворот угла поля подмагничивания относительно оси движения и датчика ЕМАТ обеспечивал увеличение величины измеряемого сигнала приблизительно на 20 децибел. Такое расположение поля обеспечивало гораздо больший отклик сигнала по сравнению с электронным шумом, что проявлялось в отчетливых связанных с дефектами показаниях,находящихся выше относительно однородной базовой линии. Следовательно,устройства горизонтально поляризованных волн, использующие сенсорные обмотки ЕМАТ, которые расположены под углом к магнитному полю, обычно превосходят такие устройства, в которых линии плоскости поля параллельны проводникам сенсорной обмотки (см. заявку на получение патента . 10/2007/0058043 поданную). Нахождение и подсчет трещин,появившихся вследствие коррозийного воздействия, является одним из основных типов действий, на которые нацелена данная технология. В дополнение к коррозийному растрескиванию под напряжением, которое обычно направлено по оси, известно, что кольцевые сварные швы, направленные по окружности, проявляют свойства, присущие трещинам. Таким образом, для того, чтобы система ЕМАТ была всецело эффективной,необходимо применять метод,способный адаптироваться к определению аномалий,направленных как по оси, так и по окружности. Известные из уровня техники устройства внутренней диагностики используют кольцевые ряды постоянных магнитов для намагничивания трубы в направлении, параллельном оси трубы. Для получения наилучшего угла между полем подмагничивания и сенсорными обмотками,сенсорные обмотки повернуты относительно оси трубы (см. пример,заявку на получение патента Канады . 2,592,094,поданную.). Горизонтально поляризованные волны воздействуют на плоскость направленной по оси трещины, появившейся в результате коррозийного воздействия, под тем же самым углом. Следовательно,отражение горизонтально поляризованных волн от трещин,появившихся в результате коррозии, эффективно воспринимается только приемными сенсорными обмотками, расположенными поперек и повернутыми в сторону излучающей обмотки. Также, измерения затухания,использованные для определения 3 нарушения оболочки, используют приемные обмотки,расположенные диагонально и повернутые к излучающей обмотке. Эти приемные обмотки затухания смещены по окружности таким образом,чтобы они совпадали с передаваемой волной. Заметное увеличение амплитуды принимаемого сигнала является признаком нарушения оболочки. Существует необходимость создания инструмента ЕМАТ, который обеспечивал бы полный охват внутренней поверхности трубы без необходимости использования сложных механических конструкций, и создавал бы такое поле, которое могло бы быть использовано датчиками ЕМАТ для определения объемных аномалий и нарушений оболочки,ориентированных по оси или по окружности. Устройство диагностики трубопроводов, созданное в соответствии с данным изобретением, включает в себя, по крайней мере, два полюсных магнита,расположенных вокруг внешней поверхности корпуса инструмента, и находящихся под углом к центральной продольной оси корпуса. Набор датчиков установлен между противоположными концами двух полюсных магнитов. Набор датчиков включает в себя комплект сенсорных обмоток, находящихся под иным углом,чем полюсные магниты, относительно продольной оси корпуса инструмента. Таким образом, набор датчиков находится под углом по отношению к полю подмагничивания,создаваемого полюсными магнитами. Полюсные магниты и набор датчиков могут покрывать всю длину корпуса инструмента и иметь общую спиральную форму. Желательно, чтобы комплекты сенсорных обмоток находились перпендикулярно продольной оси корпуса инструмента, но, в зависимости от типа определяемых отклонений, могут быть расположены и параллельно продольной оси корпуса инструмента. Каждый комплект сенсорных обмоток может располагаться под углом 180 по отношению к соответствующему комплекту сенсорных обмоток, с частью противоположного комплекта сенсорных обмоток, находящихся на инструменте. Комплекты сенсорных обмоток, расположенные на одной и той же стороне корпуса инструмента, смещены по отношению друг к другу, но обычно находятся на одинаковом расстоянии друг от друга и от противоположных концов полюсных магнитов,расположенных под углом. Каждый комплект сенсорных обмоток включает в себя, по крайней мере,одну излучающую обмотку и две противоположные пары приемных обмоток. Одной приемной обмоткой в каждой паре может быть приемная обмотка , а другой может быть приемная обмотка . Поскольку комплекты сенсорных обмоток повернуты относительно поля подмагничивания, приемные обмотки находятся на одной линии и имеют тот же угол наклона, что и излучающая обмотка. Другими словами, приемная обмотка расположена параллельно излучающей обмотке, и нет необходимости для е диагонального смещения либо поворота относительно излучающей обмотки. Излучающая обмотка испускает звуковой сигнал,который попадает на стенку изучаемого трубчатого элемента и отражается к приемным обмоткам. 4 Приемные обмотки находятся на таком расстоянии от излучающих обмоток, чтобы сигнал, переданный излучающей обмоткой, не перекрывал получение приемной обмоткой отраженного сигнала. Каждая приемная обмотка настроена на прием таких отраженных сигналов, которые могут быть нормализованы, в исследуемой зоне и на нахождение отклонений в трубчатом элементе. Затем, излучающая обмотка может послать второй сигнал после того, как первый сигнал прошел заданное количество раз по окружности трубчатого элемента. В зависимости от угла наклона набора сенсорных обмоток относительно наклонно расположенных магнитов, ряд датчиков способен определять отклонения стенки, как по оси,так и по окружности. Объектом данного изобретения является устройство для определения рассеивания магнитного потока , реагирующего на широкий диапазон аномалий, способных создавать сигналы рассеивания магнитного силового потока. Задачей данного изобретения явилось создание устройства ,способного охватить 360 внутренней стенки трубы,используя одно намагничивающее устройство, без необходимости использования множества секций намагничивающих устройств,самих намагничивающих устройств, либо относительного движения между датчиками или секциями для достижения выявления незначительных ориентированных в осевом направлении дефектов. Другой задачей данного изобретения является создание устройства с набором электромагнитных акустических датчиков (ЕМАТ),снижающего вероятность пропуска имеющихся трещин в стенке трубы, и имеющего увеличенную восприимчивость к меньшим дефектам, то есть,увеличение амплитуды сигнала до 20 дБ. Ещ одной задачей данного изобретения является создание набора ЕМАТ, в котором достигается существенное уменьшение потребления питания генератора радиочастотных импульсов. Другой задачей данного изобретения является создание набора ЕМАТ,включающего в себя автоматическую калибровку переданных сигналов с использованием приемных обмоток, находящихся ближе всего к излучающей обмотке. И еще одной задачей данного изобретения является создание набора ЕМАТ, при работе которого возникает меньшая интерференция между передатчиками,связанная с акустическим окружением. Краткое описание чертежей Фиг. 1 - это общий вид поперечнорасположенной конструкции намагничивающего узла. Направление магнитного поля круговое и поперечное к продольной оси трубы. Фиг. 2 - это общий вид модификации наклонного намагничивающего узла, в соответствии с данным изобретением, использующего спиральное магнитное поле. Полюсные магниты повернуты или расположены спирально под углом около 30 и включают в себя гибкую или приспосабливаемую верхнюю поверхность. Фиг. 3 - это изображение другой модификации наклонного намагничивающего узла, в котором полюсные магниты повернуты примерно на 60. Фиг. 4 - это изображение другой модификации наклонного намагничивающего узла, в котором полюсные магниты повернуты примерно на 90. Фиг. 5 - это изображение ещ одной модификации наклонного намагничивающего узла,в котором полюсные магниты повернуты примерно на 120. Фиг. 6 - это изображение другой модификации наклонного намагничивающего узла, в котором полюсные магниты повернуты примерно на 150. Фиг. 7 - это вид с торца наклонного намагничивающего узла,иллюстрирующий взаимосвязь между двумя концами спиральнорасположенных или повернутых полюсных магнитов. В данном примере, полюсные магниты повернуты примерно на 135. Приспосабливаемая верхняя поверхность каждого полюсного магнита выполнена в виде щетки. Фиг. 8 иллюстрирует результирующее магнитное поле от расположенного наклонно намагничивающего узла. Направление поля диагональное, или наклонное по отношению к продольной оси трубы. Фиг. 9 - это изображение модификации наклонного намагничивающего узла, включающего ряд спирально расположенных датчиков,установленных от одного конца намагничивающего средства до другого, что обеспечивает полный охват внутренней поверхности стен трубы, а также включает некоторую степень наложения для приспособления к любому возможному повороту инструмента. 10 Устройство внутренней диагностики 20 Инструмент/ наклонный намагничивающий узел 21 Цилиндрический корпус инструмента 23 Первый конец 21 25 Второй конец 21 27 Продольная ось 21 31 Радиальный диск 40 Магнитная цепь 41 Полюсный магнит 43 Первый конец 41 45 Второй конец 41 47 Продольная осевая линия 41 49 Соответствующая верхняя поверхность 51 Щетки 61 Полюсный магнит 63 Первый конец 61 В соответствии с фиг. 1, северный полюсный магнит 41 и южный полюсный магнит 61 расположены напротив друг друга под углом примерно 180 на цилиндрическом корпусе 21 инструмента 20 таким образом,что соответствующие продольные осевые линии 47, 67 Фиг. 10 - это изображение наклонного намагничивающего узла из рисунка 8,расположенного в секции трубы. Фиг. 11 - это изображение устройства диагностики трубопроводов,включающего наклонный намагничивающий узел, осевое намагничивающее устройство и секцию датчиков определения деформации. Фиг. 12 - это схематическое изображение одной стороны ряда датчиков, включающих две линии или двойной набор сенсорных обмоток ЕМАТ,расположенных между двумя наклонно расположенными полюсными магнитами. Каждый набор сенсорных обмоток включает в себя две пары приемных обмоток и излучающую обмотку,расположенную между парами приемных обмоток. Наборы расположены в ряд,перпендикулярно центральной продольной оси устройства внутренней диагностики(и,следовательно, перпендикулярно центральной продольной оси диагностируемого трубчатого элемента), а каждая обмотка в комплекте имеет общую центральную линию с другими обмотками комплекта. Фиг. 13 - это изображение одной стороны ряда датчиков, расположенных также как сенсорная обмотка ЕМАТ на фиг. 12 при использовании на трубчатом элементе с диаметром 24 дюйма. Предпочтительные воплощения инструментов рассеивания магнитных силовых потоков,сделанные в соответствии с данным изобретением, будут описаны далее со ссылкой на чертежи и следующие элементы, показанные на чертежах 65 Второй конец 61 67 Продольная осевая линия 61 69 Приспосабливаемая верхняя поверхность 71 Щетки 80 Магнитное поле 81 Силовые линии магнитного поля 80 90 Ряд датчиков 91 Первый конец 90 93 Второй конец 90 94 Линия или комплект сенсорных обмоток 95, 97 и 98 95 Излучающая обмотка 96 Горизонтально поляризованная волна,созданная 95 97 Приемная обмотка 98 Приемная обмотка 99 Центральная ось комплекта сенсорных обмоток 94 100 Осевое намагничивающее устройство 10 Секция определения деформаций каждого полюсного магнита 41, 61 параллельны продольной осевой линии 27 цилиндрического корпуса инструмента 21 (а, следовательно,параллельны центральной продольной оси диагностируемой трубы). Хоть полюсные магниты 41, 61 и отличаются от ранних модификаций тем,5 например, что каждый магнит 41, 61 расположен вдоль всего тела инструмента 21, их осевая направленность, как показано здесь, является типичной для ранних модификаций. Расположенные таким образом полюсные магниты 41, 61 создают круговое, или поперечное магнитное поле, по отношению к стенке трубы, как показано силовыми линиями магнитного поля 81, а множество секций намагничивающего средства необходимы для обеспечения полного охвата внутренней поверхности стены трубы. На фиг. 2-6 приведен наклонный намагничивающий узел 20, в соответствии с данным изобретением, которое включает в себя магнитную цепь 40, имеющую два полюсных магнита 41, 61,расположенных под углом примерно 180 напротив друг друга на цилиндрическом корпусе инструмента 21. Каждый полюсный магнит 41, 61 расположен между первым концом 23 и вторым концом 24 цилиндрического корпуса инструмента 21. Дополнительная пара спиральных полюсных магнитов 41,61 может быть также использована совместно с каждым спиральным полюсным магнитом 41 или 61, расположенным между концами 23, 25 цилиндрического корпуса инструмента 21, с интервалом 360/ от смежного до противоположного полюсного магнита 61, 41 ( соответствует количеству полюсных магнитов 41,61). Полюсные магниты 41,61 имеют гибкую или приспосабливаемую верхнюю поверхность 49, 69,соответственно, что помогает снизить силу трения и минимизировать эффекты, связанные со скоростью прохождения наклонного намагничивающего средства 20 через полость трубы. Приспосабливаемая верхняя поверхность 49, 69 также позволяет намагничивающему узлу 20 сжаться до достаточного размера, чтобы проходить через внутренние засоры, изгибы и уменьшения сечения труб, которые могут повредить намагничивающий узел 20, снизить скорость движения или препятствовать его прохождению. Величина поворота полюсных магнитов 41, 61 зависит от величины поворота, необходимой для достижения полного охвата внутренней поверхности стенки трубопровода. Проходя последовательность от фиг 2 до фиг. 6, каждый полюсный магнит 41, 61 повернут или расположен спирально в пошаговой величине, при номинальной величине поворота примерно 150 градусов (как показано на фиг. 6). При повороте, второй конец 45, 65 полюсного магнита 41, 61 перекрывается заданным углом или величинойпо отношению к соответствующему первому концу 43, 63 (смотри фиг. 7). Из-за данной величины поворота , соответствующая продольная осевая линия 47, 67 каждого полюсного магнита 41,61, расположенного спирально, не параллельна центральной продольной оси 27 цилиндрического тела инструмента 21. Поворот полюсных магнитов 41,61 также помогает вызвать достаточную величину поворота узла намагничивания 20, при его прохождении через полость трубопровода. Фиг. 8 иллюстрирует магнитное поле 80,созданное наклонным узлом намагничивания 20 по 6 прототипу, чья конфигурация аналогична с узлом намагничивания 20,показанным в последовательности фиг. 2-6. В отличие от известного уровня техники, относящегося к устройствам внутренней диагностики трубопроводов, направление магнитного поля 80 расположено диагонально, либо под углом к оси трубы, а не круговое или поперечное, при котором силовые линии магнитного поля 81 исходят из полюсов 41,61 и проходят во взаимопротивоположных направлениях для достижения соответствующих полюсов 41,61. Силовые линии магнитного поля 81 создаваемые каждым полюсным магнитом 41,61, направляются по траектории наименьшего сопротивления на стену трубы и далее на прилегающий полюсный магнит 61,41. Угол магнитного поля 80 обычно перпендикулярен силовым линиям 81, создаваемых магнитными полюсами 41, 61 и в общем параллелен линии, соответствующей кратчайшему расстоянию между магнитными полюсами 41, 61. Направление магнитного поля 80 в пределах действия полюсов 41,61 может варьироваться от 30 до 60 градусов относительно оси трубопровода. В соответствии с фиг. 9 и 10, наклонный узел намагничивания 20 может включать в себя ряд спирально расположенных датчиков 90,находящихся примерно на одинаковом расстоянии между повернутыми полюсными магнитами 41, 61,и расположенных таким образом, чтобы обеспечить полное охватывание внутренней поверхностистенки трубы Р, а также обеспечивать любой возможный поворот узла намагничивания 20. Отдельные датчики из ряда датчиков 90 могут принадлежать к типу, хорошо известному в области техники, из-за их способности определять сигналы рассеивания магнитного силового потока. Ряд датчиков 90 располагается между первым концом 23 и вторым концом 25 цилиндрического корпуса 21(и, следовательно, между соответствующими концами 43, 45 и 63, 65 полюсных магнитов 41,61),и включает в себя степень наложениямежду первым концом 91 и вторым концом 93 ряда датчиков 90. Соответствующие верхние поверхности 49, 69 полюсных магнитов 41,61 (см. пример на фиг. 6) могут быть выполнены в виде щеток 51,71. Радиальные диски 31 А и В помогают продвинуть и отцентрировать узел намагничивания 20 при его движении в трубе Р при различном давлении. Окончательная конфигурация узла намагничивания 20 может включать любую комбинацию определения наборов данных, включая,но не ограничиваясь, деформацию, осевое рассеивание магнитного силового потока высокого уровня,внутреннюю/внешнюю разрешающую способность,данные, необходимые для картирования, а также остаточное или низкоуровневое рассеивание магнитного силового потока. В одном из конструктивных исполнений устройства диагностики трубопроводов 10, включающем наклонный узел намагничивания 20, инструмент 10 включает в себя осевое намагничивающее устройство 100 и секцию определения деформаций 110 (см. фиг. 11). На фиг. 12 и 13 приведен ряд датчиков 90,который включает в себя сенсорные обмотки электромагнитных акустических датчиков (ЕМАТ) 95,97 и 98,расположенных между противоположными концами 42, 62 наклонно расположенных полюсных магнитов 41,61. Сенсорные обмотки 95, 97 и 98 расположены в сенсорные линии или комплекты 94 а-е, как определено соответствующим комплектом сенсорных обмоток центральной оси 99 а-е. Каждая центральная ось 99 а-е обычно параллельна другим осям 99 а-е и расположена под заданным угломотносительно центральной продольной оси 27 цилиндрического корпуса инструмента 21. Схожий комплект сенсорных обмоток (не показан) 94 а-е расположен на противоположной внешней поверхности цилиндрического корпуса инструмента 21, под углом около 180 напротив комплекта сенсорных обмоток 94 а-е. Наклонно расположенные полюсные магниты 41,61 обычно расположены под угломотносительно центральной продольной оси 27, при которой уголотличается от угла . Поскольку магнитные силовые линии 81, создаваемые полюсными магнитами 41,61 обычно перпендикулярны концам 42, 62 полюсных магнитов 41, 61, то магнитное поле 80 повернуто под угломотносительно центральной продольной оси 21, и, следовательно, находится под углом к комплекту сенсорных обмоток 94 а-е. В предпочтительной модификации, уголсоставляет примерно 90, уголпримерно 45, а уголпримерно 45. Расположение комплекта сенсорных обмоток 94 а-е перпендикулярно центральной продольной оси 27 цилиндрического корпуса 21 (и, следовательно,перпендикулярно оси трубы) позволяет комплекту ряда датчиков 90 обнаруживать отклонения, как в осевом так и в круговом направлении. Излучающие обмотки 95 создают горизонтально поляризованные волны 96, проходящие по окружности трубы, и падающие под нормальным углом(перпендикулярно) на расположенные по оси трещины. Расположение комплекта сенсорных обмоток 94 а-е параллельно центральной продольной оси 27 цилиндрического корпуса инструмента 21 (а, следовательно, параллельно оси трубы) позволяет ряду датчиков 90 обнаружить отклонения в круговом направлении. Горизонтально поляризованные волны 96 передаются вдоль стенки трубы по оси таким образом, чтобы обнаруживать отраженные сигналы от поперечных трещин, таких как трещины в кольцевом сварном шве. В отличие от расположения приемных обмоток в известных инструментах ЕМАТ, приемные обмотки 97, 98 не нужно смещать диагонально, либо поворачивать вперед относительно излучающей обмотки 95 для получения лучших результатов от магнитного поля 80, повернутого относительно сенсорных обмоток ЕМАТ 95, 97 и 98. Сенсорные обмотки 95, 97 и 98 могут быть установлены на подходящее механизм, такой как подпружиненная прокладка (не показана), которая будет держать обмотки 95, 97 и 98 на расстоянии,близком к диаметру трубы. Излучающие обмотки 95 индуцируют горизонтально поляризованные волны 96 по двум круговым направлениям вокруг трубы. Приемные обмотки 97 обнаруживают отраженные сигналы от трещин, вызванных коррозией, и служат в качестве калибровочных приемников. Приемные обмотки 98 обнаруживают горизонтально поляризованные направленные волны 96,проходящие от излучающих обмоток 95 в круговом направлении. Характерные свойства обнаруженных сигналов, такие как амплитуда и время поступления,могут быть использованы для обнаружения таких аномалий, как нарушение целостности оболочки,коррозия или трещины, вызванные коррозийным воздействием. Приемные обмотки 97, 98 располагаются на заданном расстоянии от излучающих обмоток 95 таким образом, чтобы ответные сигналы были обнаружены приемными обмотками 97, 98, но не испытывали воздействия первоначального электронного возбуждающего импульса. Каждая излучающая обмотка 95 в комплекте 94 а-е собрана в группу из двух приемных обмоток 97, 98 на каждой стороне. Ряд датчиков 90 включает в себя соответствующее количество излучающих 95 и приемных обмоток 97, 98 для обеспечения обнаружения трещин, вызванных коррозией, и обнаружения нарушений оболочки. В одной предпочтительной модификации, каждый из двух рядов датчиков 90, расположенных напротив друг друга и предназначенных для использования в 24 дюймовой трубе, включали в себя пять излучающих обмоток 95 и 20 приемных обмоток 97, 98. Активизация каждой излучающей обмотки 95 приводит к испусканию горизонтально поляризованных волн 96 влево и вправо от обмотки 95, а также по окружности трубы. Приемные обмотки 97, 98, находящиеся ближе всего к активной излучающей обмотке 95, первыми принимают исходящие волны 96, а затем коммутируют на более длительном заданном промежутке времени, предпочтительно через 50 или 90 микросекунд для 24-дюймовой трубы, для обнаружения сигналов, отраженных от трещин,вызванных коррозийным воздействием. Эти отраженные сигналы приходят от целевых замеряемых зон , расположенных между приемными обмотками 97 и заданной дистанциейпосле приемных обмоток 98,для увеличения зоны охвата, и понижения помех. Отраженные сигналы нормализуются, то есть разделяются по исходящим сигналам, обнаруженным в приемных обмотках 97 для обеспечения продолжительной калибровки отражения сигналов. В качестве примера, для 24-дюймовой трубы и целевого осевое замеряемое расстояние в 6 мм (0,24 дюйма), частота импульса 390 Гц создает аксиальное разрешение в 5,1 мм (0.20 дюйма). Данная частота импульса позволяет горизонтально 7 поляризованной волне 96 проходить примерно 4.25 раза по окружности трубы перед выходом второго импульса или тональной посылки. Следовательно,остатки первого импульса находятся между приемными обмотками 97, 98, а значит, не оказывают воздействия на приемные обмотки 97, 98,расположенные на противоположной стороне корпуса инструмента 21 внутри данного окружного кольца в период замера. Горизонтально поляризованные волны 96 все ещ находятся внутри приемного канала во время третьего выпуска сигнала, после того, как волна 96 прошла примерно 8.5 раз вокруг трубы. Используя коэффициент затухания в 0.8 на 2 фута пути(коэффициент,определенный в результате лабораторных испытаний), отправленный звуковой сигнал размером 100 имеет амплитуду менее 0,3 при возвращении на приемные обмотки 97, 98,расположенные на противоположной стороне цилиндрического корпуса инструмента 21. Данное количество шума обычно является ничтожно малым,по сравнению с другими источниками шума,например, термальный электронный шум, который может составлять 3 от полной шкалы. Нарушения оболочки обнаруживаются в целевых замеряемых зонахмежду приемными обмотками 97 и приемными обмотками 98,расположенными на одной линии с излучающими обмотками 95. Обнаружение нарушений оболочки может быть выполнено подсчетом соотношения коммутированного сигнала приемной обмотки. Соотношения, выше допустимого порога, указывают на отсутствие оболочки, либо на дефекты в трубе в определенной зоне 99. В исследованиях, проведенных изобретателями,ряд датчиков 90, сделанный в соответствии с данным изобретением, показал следующие преимущества по сравнению с предыдущим прототипомповышенная чувствительность к мелким дефектам, то есть, увеличение амплитуды сигнала до 20 дБсущественное понижение потребления питания генератором радиочастотных импульсовполное круговое охватывание снижает вероятность пропуска имеющихся трещинавтоматическая калибровка переданного сигнала при использовании приемных обмоток,расположенных наиболее близко к излучающим обмоткам а также уменьшение интерференции между излучающими обмотками, вызванных акустическим окружением. Возможны различные конфигурации, зависящие от диаметра трубы, с различным количеством полюсных магнитов 41,61, сенсорных обмоток 95, 97 и 98, а также ряда датчиков 90. Для проведения кругового исследования, например, ряд датчиков 90 может быть повернут под угломотносительно оси трубы,все ещ находясь в пределах углового поля подмагничивания 80. В дополнение к трещинам,вызванным коррозийным воздействием и отклонениям, сходным с трещинами, такие конфигурации могут реагировать на такие аномалии,8 как нарушения целостности оболочки и угар металла. Получившаяся система может быть также использована как система ЕМАТ, либо совместно с любой другой технологией, доступной среди устройств внутритрубной диагностики, в том числе включая, но не ограничиваясь устройствами,обеспечивающими регистрацию рассеивания магнитного потока, наличие деформаций, измерение каверномером, а также картирование. Хоть устройство ЕМАТ, включающее в себя наклонный намагничивающий узел и спиральный набор датчиков, было описан довольно детально,много изменений могут быть внесены в детали конструкции и расположение компонентов, не отдаляясь от общей направленности данного документа. Таким образом, устройство ЕМАТ, в соответствии с данным изобретением, ограничено только лишь областью, определяемой заявленной формулой, включая полный спектр эквивалентов,которым соответствует каждый элемент. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Устройство диагностики трубопроводов,включающее набор датчиков для диагностики внутренней стенки трубчатого элемента, состоящий из следующих компонентов- первый и второй комплект сенсорных обмоток,каждая из которых включает в себя первую и вторую пару приемных обмоток, и излучающую обмотку- названная излучающая обмотка и названные первая и вторая пары приемных обмоток,расположены параллельно друг другу, и находятся на общей центральной линии, а названная излучающая обмотка находится между первой и второй парой приемных обмоток- причем упомянутая общая центральная линия расположена под угломотносительно центральной продольной оси устройства диагностики, на котором размещены каждый из этих комплектов сенсорных обмоток- устройство диагностики также содержит, по крайней мере,два полюсных магнита,расположенных под углом к центральной продольной оси устройства диагностики- причем упомянутый первый и второй комплект сенсорных обмоток, расположены на внешней поверхности устройства диагностики, и находятся между, и на существенно одинаковом расстоянии от противоположных концов по крайней мере двух полюсных магнитов. 2. Устройство по п.1, отличающееся тем, что указанный уголвыбран таким образом, что упомянутая общая центральная линия расположена под углом к центральной продольной оси каждого полюсного магнита, по меньшей мере, относительно двух полюсных магнитов. 3. Устройство по п.1, отличающееся тем, что уголвыбран таким образом, что общая центральная линия расположена параллельно центральной продольной оси устройства диагностики трубопровода. 4. Устройство по п.1, отличающееся тем, что упомянутый уголсоставляет примерно 90. 5. Устройство по п.1, отличающееся тем, что первый и второй комплект сенсорных обмоток находятся напротив друг от друга под углом примерно 180. 6. Устройство по п.1, отличающееся тем, что часть первого комплекта сенсорных обмоток и часть второго комплекта сенсорных обмоток находятся в пределах общей круговой зоны устройства диагностики. 7. Устройство по п.1, отличающееся тем, что часть излучающей обмотки первого комплекта сенсорных обмоток смещена в направлении,перпендикулярном центральной продольной оси устройства диагностики. 8. Устройство по п.1, отличающееся тем, что упомянутая излучающая обмотка, по меньшей мере,в одном из комплектов сенсорных обмоток,излучает сигнал, который отражается поверхностью стенки трубчатого элемента,а затем диагностируется устройством диагностики. 9. Устройство по п.8, отличающееся тем, что сигнал проходит заданное количество раз по окружности трубчатого элемента перед тем, как излучающая обмотка направит второй сигнал. 10. Устройство по п.8, отличающееся тем, что,по меньшей мере, одна из первой или второй пары приемных обмоток производит анализ сигнала. 11. Устройство по п.8, отличающееся тем, что,по крайней мере, одна из первой или второй пары принимающих обмоток производит анализ отраженного сигнала. 12.Устройство по п.11, отличающееся тем, что отраженный сигнал является нормализованным. 13. Устройство по п.11, отличающееся тем, что анализ производится через установленные промежутки времени. 14. Устройство по п. 11, отличающееся тем, что сигнал проходит заданное количество раз по окружности трубчатого элемента, до того, как одна из первых или вторых приемных обмоток выполнит анализ отраженного сигнала. 15. Устройство по п. 11, отличающееся тем, что анализ производится в целевой зоне измерения, на расстоянии между первой приемной обмоткой и заданным расстояниемпосле второй приемной обмотки. 16. Устройство по п.11, отличающееся тем, что каждая из первой и второй пары приемных обмоток расположены на некотором расстоянии от излучающей обмотки таким образом, что сигнал,передаваемый излучающей обмоткой, не затрудняет определение отраженного сигнала первой и второй парой приемных обмоток. 17. Устройство по п.1, отличающееся тем, что включает упомянутые ранее первую и вторую пары приемных обмоток, каждая из которых включает в себя приемные обмоткии . 18. Устройство по п.1, отличающееся тем, что в первой и второй паре приемных обмоток имеется,по крайней мере, одна приемная обмотка,являющаяся регулируемой приемной обмоткой. 19. Устройство по п.1, отличающееся тем, что в каждой первой и второй паре приемных обмоток имеется, по крайней мере, одна приемная обмотка,являющаяся калибровочной обмоткой. 20. Устройство по п.1, отличающееся тем, что оно включает, по крайней мере, один комплект первой и второй приемной обмотки, способный обнаружить по крайней мере одну из ориентированных по оси аномалий стенки, а также аномалию, расположенную по окружности стенки.
МПК / Метки
МПК: G01N 29/04, G01N 29/24
Метки: спиральным, двойным, датчиков, акустических, трубопроводов, электромагнитных, диагностики, набором, устройство
Код ссылки
<a href="https://kz.patents.su/13-25439-ustrojjstvo-diagnostiki-truboprovodov-s-dvojjnym-spiralnym-naborom-elektromagnitnyh-akusticheskih-datchikov.html" rel="bookmark" title="База патентов Казахстана">Устройство диагностики трубопроводов с двойным спиральным набором электромагнитных акустических датчиков</a>
Сегмент опорного элемента датчиков устройства скребкового типа, опорный элемент датчиков и устройство скребкового типа
Номер предварительного патента: 16862
Опубликовано: 16.01.2006
Авторы: ВАЙТ, Кристиан, РИХТЕР, Томас, ШВАРЦ, Аксел
МПК: F16L 55/26
Метки: сегмент, опорный, опорного, скребкового, элемент, элемента, типа, датчиков, устройства, устройство
Формула / Реферат:
Изобретение относится к сегментам опорного элемента датчиков для устройства скребкового типа, состоящий по меньшей мере из двух пар преимущественно параллельных подвижных блоков, расположенных друг за другом. Между, по меньшей мере, одной парой подвижных блоков расположена опорная плита для датчиков. Сегмент может сочетаться с другими сегментами, образуя опорный элемент датчиков, отличающийся высокой эксплуатационной и функциональной надежностью...
Устройство диагностики трубопроводов с наклонным намагничивающим средством
Номер патента: 24953
Опубликовано: 15.11.2011
Авторы: Марк Грегуар, Джеймс Симек, Тод Баркер
МПК: G01N 29/04, G01N 29/24
Метки: трубопроводов, средством, намагничивающим, устройство, диагностики, наклонным
Формула / Реферат:
Устройство диагностики трубопроводов содержит "n" спиральных полюсных магнитов, находящихся на одинаковом расстоянии друг от друга и охватывающих всю длину средства намагничивания. Каждый полюсный магнит, имеющий соответствующую верхнюю поверхность, повернут или расположен спирально на корпусе средства намагничивания таким образом, что второй конец каждого полюсного магнита перекрывает заданное расстояние "α", относительно первого конца того же...
Способ и устройство привязки трех лазерных датчиков М5/Laser к одному центру

Номер патента: 21805
Опубликовано: 15.10.2009
Авторы: Дудак Николай Степанович, Искакова Динара Алтынбековна
МПК: G01B 11/08
Метки: привязки, устройство, одному, датчиков, трех, центру, лазерных, способ
Формула / Реферат:
Способ привязки трёх лазерных датчиков M5/LASER к одному центру позволяет повысить точность измерения диаметров, отклонений от круглости и др. путём идентификации положения оси детали в горизонтальной и вертикальной плоскостях. В заявленном способе использован известный способ спаривания двух лазерных датчиков M5/LASER с помощью инфракрасной преобразовательной пластинки и дополнительно разработан способ привязки третьего лазерного датчика...
Контрольно-калибровочное устройство для нейтронных датчиков-зондов
Номер предварительного патента: 9169
Опубликовано: 15.06.2000
Авторы: Филатов Виктор Владимирович, Муканов Димкеш
МПК: G01N 23/12
Метки: контрольно-калибровочное, нейтронных, датчиков-зондов, устройство
Формула / Реферат:
Изобретение относится к измерительной технике, в частности к устройствам для калибровки нейтронных датчиков-зондов, используемых при исследовании физических свойств материалов с помощью нейтронного излучения, например, при измерении влажности и плотности различных материалов. Конструкция контрольно-калибровочного устройства для нейтронных датчиков-зондов, обеспечивает технический результат изобретения - высокую воспроизводимость...
Сепаратор частиц при циркуляции жидкости с двойным эффектом экстракции, способ и устройство для очистки жидкости биологическим путем
Номер патента: 7559
Опубликовано: 17.05.1999
Автор: Мерсье Доминик
Метки: частиц, очистки, биологическим, эффектом, устройство, экстракции, путем, двойным, сепаратор, циркуляции, жидкости, способ
Формула / Реферат:
Настоящее изобретение относится к сепараторам частиц при циркуляции жидкости с двойным эффектом экстракции и к устройствам, предназначенным для отделения от жидкости частиц, находящихся в ней во взвешенном состоянии, а также к способу и устройству для очищения обрабатываемой жидкости биологическим путем с использованием такого сепаратора частиц. Сепаратор включает в себя цилиндрический корпус, имеющий средства тангенциальной подачи...
Предыдущий патент: Устройство контроля температуры в электродуговой печи
Следующий патент: Плуг для обработки почвы
Случайный патент: Способ хирургического лечения туберкулеза коленного сустава