Способ и устройство привязки трех лазерных датчиков М5/Laser к одному центру
Номер патента: 21805
Опубликовано: 15.10.2009
Авторы: Искакова Динара Алтынбековна, Дудак Николай Степанович

Формула / Реферат
Способ привязки трёх лазерных датчиков M5/LASER к одному центру позволяет повысить точность измерения диаметров, отклонений от круглости и др. путём идентификации положения оси детали в горизонтальной и вертикальной плоскостях. В заявленном способе использован известный способ спаривания двух лазерных датчиков M5/LASER с помощью инфракрасной преобразовательной пластинки и дополнительно разработан способ привязки третьего лазерного датчика M5/LASER к одному центру с помощью инфракрасной преобразовательной пластинки. Для облегчения привязки к одному центру с помощью инфракрасной преобразовательной пластинки и совмещения лучей датчиков нанесены линии, образующие квадраты на верхней, правой и левой (боковых) сторонах пластинки и крестовые метки в центре. Дополнительное совмещение осей лучей с помощью квадратов, образованных указанными линиями, и с помощью совпадения образующих цилиндров лучей датчиков с граничными гранями пластинки обеспечивает совпадение крайних трёх точек линий расчётных наибольших измеряемых расстояний датчиков, т.е. привязку трёх датчиков к одному центру.
Текст
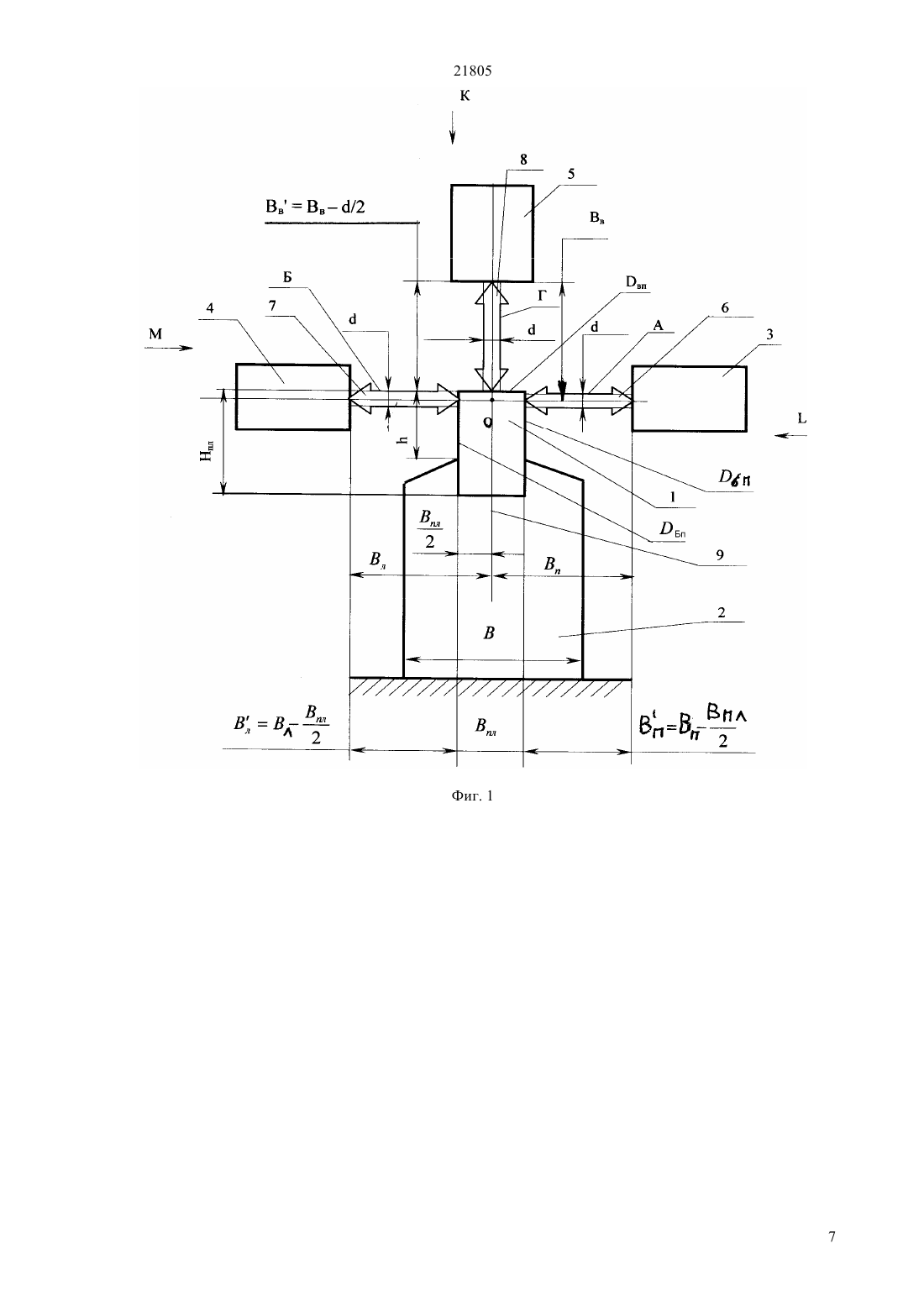
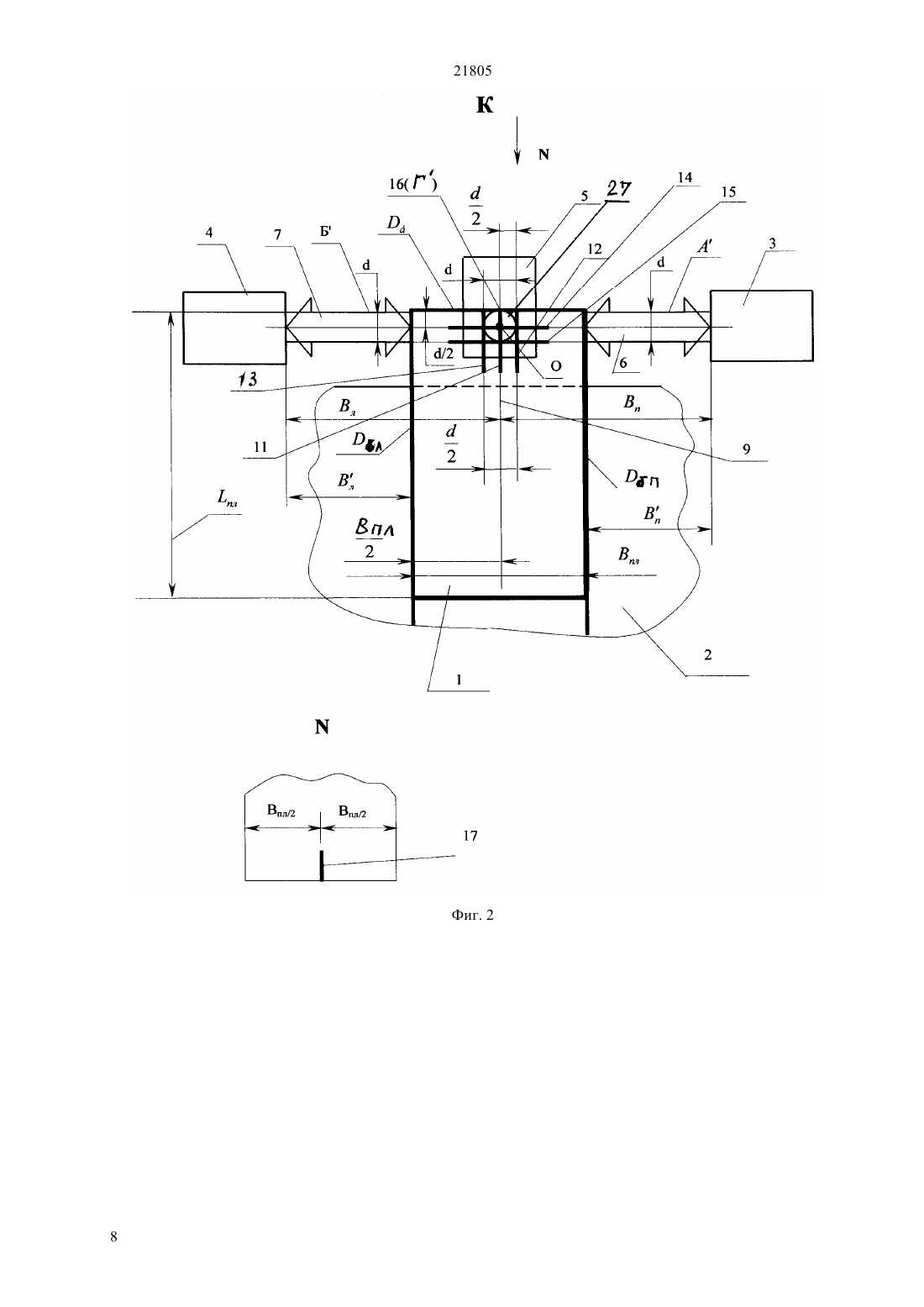
(51) 01 11/08 (2006.01) КОМИТЕТ ПО ПРАВАМ ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ МИНИСТЕРСТВА ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ИННОВАЦИОННОМУ ПАТЕНТУ плоскостях. В заявленном способе использован известный способ спаривания двух лазерных датчиков 5/ с помощью инфракрасной преобразовательной пластинки и дополнительно разработан способ привязки третьего лазерного датчика 5/ к одному центру с помощью инфракрасной преобразовательной пластинки. Для облегчения привязки к одному центру с помощью инфракрасной преобразовательной пластинки и совмещения лучей датчиков нанесены линии,образующие квадраты на верхней, правой и левой(боковых) сторонах пластинки и крестовые метки в центре. Дополнительное совмещение осей лучей с помощью квадратов, образованных указанными линиями, и с помощью совпадения образующих цилиндров лучей датчиков с граничными гранями пластинки обеспечивает совпадение крайних трх точек линий расчтных наибольших измеряемых расстояний датчиков, т.е. привязку трх датчиков к одному центру.(72) Дудак Николай Степанович Искакова Динара Алтынбековна(73) Республиканское государственное казенное предприятие Павлодарский государственный университет им. С. Торайгырова Министерства образования и науки Республики Казахстан(56) Рабинович А.Н. Приборы и системы автоматического контроля размеров деталей машин. Киев Технка, 1970, с. 456(54) СПОСОБ И УСТРОЙСТВО ПРИВЯЗКИ ТРЕХ ЛАЗЕРНЫХ ДАТЧИКОВ М 5/ К ОДНОМУ ЦЕНТРУ(57) Способ привязки трх лазерных датчиков 5/ к одному центру позволяет повысить точность измерения диаметров, отклонений от круглости и др. путм идентификации положения оси детали в горизонтальной и вертикальной 21805 Изобретение относится к области измерительной техники для контроля наружных диаметров валов,гильз, втулок с микрометрической точностью бесконтактным способом. Ниже описан раздел Уровень техники Известен способ спаривания двух лазерных датчиков 5/ для измерения толщины изделий типа лент, пластин 1. Известно применение лазерной системы -система для измерения расстояния 2, стр. 263, 264, п. 16.2, рис. 16,5 для контроля толщины лент, пластин 2, стр. 262-268, рис. 16.3, 16.7,16.8 двумя лазерными датчиками 5/, область измерения диаметров которых равна сумме их удвоенных диапазонов измерения 2 В, где диапазон измерения В меняется от 2,5 мм до 200 мм В опорное расстояние датчиков. При увеличении диапазона измерения уменьшается точность. Способ спаривания двух лазерных датчиков 5/ принят в качестве аналога и прототипа. Основные признаки способа-аналога и прототипа. Для осуществления способа-аналога 1 применяют два лазерных датчика 5/, устанавливаемых после спаривания на стойке в рабочем пространстве конвейера или на направляющих промышленного оборудования для выполнения измерения, и инфракрасная преобразовательная пластинка. Предварительно, до установки стойки и пластинки на оборудование в положении измеряемого объекта для осуществления спаривания устанавливают на подставке инфракрасную преобразовательную пластинку. При спаривании двух лазерных датчиков используют измерение расстояния до объекта(пластинки), при этом падающий луч датчика, доходя до пластинки, преобразуется, частично отражается и улавливается примником, а частично проникает в пластинку, до определнной степени прозрачную, в которой чтко виден цилиндр наружного диаметра луча. Совмещение лучей датчиков с помощью инфракрасной преобразовательной пластинки используют при спаривании датчиков для расположения осей лучей лазерных датчиков на одной линии. Установкой датчиков для измерения заданного расстояния до пластинки с обеих сторон определяют расстояние между датчиками при совпадении крайних точек расчтного расстояния датчиков с учтом толщины пластинки. Измерением расстояния до производственного объекта таким образом спаренными датчиками после установки стойки в рабочую зону оборудования определяют толщину объекта (ленты, пластины). Способ имеет ограниченную область применения только при настройке лазерных датчиков 5/ для измерения толщины лент, пластин. Для выполнения других измерений с использованием лазерных датчиков 5/, а также для повышения точности измерения необходимы другие способы, как заявленный способ и устройство для привязки трх лазерных датчиков 5/ к одному центру. Основные признаки устройства-аналога и прототипа. В способе-аналоге используют имеющиеся лазерные датчики 5/. Для установки в зону 2 измерения лазерных датчиков 5/ используют стойку и подставку для инфракрасной преобразовательной пластинки. Стойка, на которую устанавливаются датчики, имеет установочные элементы с заданным между ними расстоянием для установки датчиков. Это позволяет определить расчтное расстояние между спаренными датчиками с использованием совмещения крайних точек расчтного расстояния обоих датчиков, настроенных на измерение заданного расчтного расстояния, т. е. их спаривания С 2 В 2 В, где В - опорное расстояние лазерного датчика. Для спаривания и совмещения(совпадения) лучей двух датчиков используют инфракрасную преобразовательную пластинку размером 2020 мм. При совмещении лучей используют свойство инфракрасной пластинки формировать внутри чткий образ цилиндра луча(преобразовывать луч) с последующим определением и сведением к минимуму величины несовпадения образующих цилиндров или осей лучей от двух датчиков. Указанная стойка и подставка для пластинки использованы в качестве аналога и прототипа. Ниже представлен раздел Сущность изобретения Задача изобретения. Задача изобретения заключается в изобретении способа настройки трх лазерных датчиков с целью использовании их для контроля точности высокоточных деталей типа тел вращения. В качестве аналога и прототипа принят способ спаривания двух лазерных датчиков 5/, результат которого используется для контроля толщины деталей типа лент, пластин. Если вместо пластины установить для измерения тело вращения, например, вал на центрах, то можно измерять переменное расстояние до вала при его вращении (следовательно, и отклонение от круглости наружной поверхности вала). Однако из-за плавания оси вала при его вращении будут иметь место значительные погрешности. Увеличить точность измерения путм идентификации положения оси вала не только в горизонтальной, но и в вертикальной плоскостях можно, установив в вертикальной плоскости третий лазерный датчик и привязав его к общему центру, т. е. совместив крайние точки расчтного расстояния трх лазерных датчиков. Основные признаки заявленного способа,совпадающие с признаками способа-аналога. В заявленном способе используют полностью признаки способа-аналога спаривания двух лазерных датчиков 5/ с помощью преобразовательной инфракрасной пластинки. При этом спаривают два лазерных датчика с лучами в горизонтальной плоскости. Спаренные таким образом два лазерных датчика 5/ используют в способе-аналоге для измерения толщины неподвижных или движущихся поступательно изделий типа лент, пластин. Привязка третьего лазерного датчика 5/ к центру между двумя датчиками (общему центру, одному центру) составляет отличительный признак и отражена в следующем пункте. Основные признаки заявленного способа,отличающиеся от признаков способа-аналога. Заявленный способ привязки трх лазерных датчиков к одному центру предназначен для использования их 21805 при измерении диаметров, отклонений от круглости,прямолинейности образующих деталей типа валов,гильз, втулок. В заявленном способе используют признаки способа-аналога спаривания двух лазерных датчиков 5/ с помощью преобразовательной инфракрасной пластинки для измерения в горизонтальной плоскости. Спаренные таким образом два лазерных датчика 5/ используют в способе-аналоге для измерения толщины неподвижных или движущихся поступательно изделий типа лент, пластин, а в заявленном способе, в отличие от аналога, - для измерения вращающихся и периодически поворачиваемых или перемещаемых вдоль оси деталей диаметров, отклонений от круглости и прямолинейности образующих. Привязка третьего лазерного датчика 5/ к центру между двумя датчиками (общему центру, одному центру) также составляет отличительный признак. Третий датчик позволяет повысить точность измерения, благодаря идентификации положения оси измеряемой детали в вертикальной плоскости дополнительно к идентификации е двумя спаренными лазерными датчиками в горизонтальной плоскости. Отличительными признаками заявленного способа спаривания двух лазерных датчиков 5/ в составе способа привязки трх датчиков к одному центру также являются следующие признаки на преобразовательной инфракрасной пластинке нанесены метки (центральная крестовая и боковые,образующие квадрат со стороной, равной диаметру луча датчика. При спаривании горизонтальных(боковых) лазерных датчиков 5/ образующие лучей датчиков дополнительно совмещаются с соответствующими центральными рисками крестовых меток на верхней и передней сторонах пластинки, а круг поперечного сечения лучей датчиков - со сторонами квадратов, расположенных в верхних углах пластины (которые образованы рисками и линиями от пересечения боковых,верхней и передней плоскостей), равных 90. Момент совмещения фиксируется по моменту исчезновения (или появления) яркой линии света луча образующей на передней и верхней плоскостях пластинки. Использование меток позволяет упростить и повысить точность спаривания двух лазерных датчиков 5/. К общему центру О на фиг. 1-4 привязывается третий (верхний) лазерный датчик 5/ с помощью крестовой метки на верхней грани преобразовательной инфракрасной пластинки, как описано выше. При этом круг поперечного сечения луча датчика во всех случаях вписывается в образованный рисками квадрат, а образующая луча датчика совмещается с сопряжнной гранью пластины. Использование трх лазерных датчиков при указанных выше измерениях повышает точность измерений. Основные признаки заявленного устройства,совпадающие с признаками устройства-аналога. Заявленное устройство, как и аналог, состоит из стойки,лазерных датчиков 5/,преобразовательной инфракрасной пластинки, подставки под пластинку. Стойка имеет места для установки и крепления датчиков 5/,подставка имеет паз для закрепления преобразовательной инфракрасной пластинки. Основные признаки заявленного устройства,отличающиеся от признаков устройства-аналога. Заявленная стойка предназначена для установки на прибор (который не является предметом данного изобретения и здесь не представлен, за исключением эскизной прорисовки основания) и не предназначена для установки на оборудование, потому имеет особую П-образную конструкцию для установки двух боковыъх спаренных лазерных датчиков 5/ на е вертикальных двух боковых сторонах и верхнюю поперечную часть для установки третьего, верхнего,датчика. Преобразовательная инфракрасная пластинка имеет на трх сторонах систему меток и на передней стороне (плоскости) одну метку напротив центральной метки верхней плоскости для облегчения и повышения точности спаривания двух боковых лазерных датчиков и привязки их к общему центру, а также для привязки к общему центру третьего, верхнего, лазерного датчика 5/. Подставка для преобразовательной инфракрасной пластинки конструктивно вписывается в габариты прибора, а не рабочего пространства оборудования. Заявленное устройство при внедрении в производство должно проектироваться в конструктивном исполнении вместе с прибором для использования данного способа и устройства. Прибор не является предметом данного изобретения. Технический результат - повышение точности измерения деталей при использовании заявленного способа и устройства привязки трх лазерных датчиков М 5/ к одному центру. Технический результат достигается тем, что в схему измерения введн третий лазерный датчик М 5 /. Два спаренных лазерных датчика привязаны к одному центру - оси вала - с использованием инфракрасной преобразовательной пластинки с установкой лучей датчиков по двум боковым плоскостям и совмещением лучей датчиков М 5/. Третий датчик привязывается к центру с использованием этой же инфракрасной преобразовательной пластинки по верхней и передней плоскостям. Ниже представлено описание фигур. На фиг. 1 показана общая схема привязки трх лазерных датчиков к общему центру О, нанесены необходимые позиции, обозначения, признаки. На фиг. 2 показан вид сверху на схему привязки трх датчиков к одному центру по стрелке К, нанесены необходимые позиции, обозначения, признаки. На фиг. 3 показан вид справа по стрелкена схему привязки трх датчиков к одному центру, нанесены необходимые позиции, обозначения, признаки. На фиг. 4 показан вид слева по стрелке М на схему привязки трх датчиков к одному центру, нанесены необходимые позиции, обозначения, признаки. На фиг. 5 показана стойка с датчиками, подставкой и инфракрасной пластинкой, нанесены необходимые позиции, обозначения, признаки. 3 21805 Сведения,показывающие возможность осуществления изобретения. Описание осуществления способа и устройства. На фиг. 1 показаны 1 инфракрасная преобразовательная пластинка для установки датчиков для установки датчиков используется измерение расстояния лазерными датчиками до инфракрасной преобразовательной пластинки и установка датчиков для совмещения образующих А, Б, лучей 6 и 7 с верхней вп и передней п плоскостью и образующей Г луча 8 с границей пластины (передней плоскостью на фиг. 3) 2 - опора для инфракрасной преобразовательной пластинки 1 3- правый лазерный датчик 5/ 4 - левый лазерный датчик 5/ 5 - верхний лазерный датчик 5/ путм совмещения границы лучей(образующих А и Б цилиндров диаметромлучей 6 и 7 датчиков 3 и 4) с верхней плоскостью вп и с передней плоскостью п (образующих А и Б цилиндров диаметромлучей 6 и 7 датчиков 3 и 4 на фиг. 2) достигается пересечение осей лучей датчиков 3 и 4 с осью луча датчика 5 в точке О, ось луча при этом совмещается с осью симметрии пластины 9 вертикальной линией)- диаметр луча лазерных датчиков Впл-ширина инфракрасной преобразовательной пластинки- высота установки пластины (расстояние от верхней части опоры до верхней измерительной плоскости инфракрасной преобразовательной пластинки) Нпл - высота пластины Впл - ширина пластины В - опорное расстояние датчиков Вп, Вл, Вв - расчтные расстояния соответственно для правого, левого и верхнего датчиков ВпВлВвВВ Вп, Вл , Вв - расчтные измеряемые расстояния (в процессе настройки) соответственно правым (3), левым (4), верхним (5) Влпл 2 Вл 2 при этом датчиками ВпВп нужно добиться возможно меньшей разницы между расстояниями Вп , Вл и Вв-/2 при таком соотношении размеров крайние точки этих трх расчтных расстояний Вп и Вл и Вв сойдутся в точке 0,причм погрешность привязки к общему центру будет равна погрешности способа измерения расстояний указанными датчиками - выступающая часть пластины над опорой вп - верхняя плоскость инфракрасной преобразовательной пластинки , л боковые плоскости инфракрасной преобразовательной пластинки соответственно правая и левая. 6, 7, 8 - лучи правого, левого и верхнего датчиков соответственно А,Б,Г - образующие лучей соответственно правого,левого и верхнего датчиков в общей осевой плоскости лучи 6 и 7 совмещаются образующими А и Б с верхней плоскостью пластины вп для установки их общей оси и проходят через т. О К,Л,М - стрелки, по направлению которых рассматривается схема на фиг. 2,3,4. На фиг. 2 показаны 1 - инфракрасная преобразовательная пластина 2 - опора для пластины 3 - правый лазерный датчик 5/ 4 - левый лазерный датчик 5/ 5 - верхний лазерный датчик 5/ (размеры датчиков показаны не в масштабе условно уменьшенными) 6 - измерительный луч правого датчика 7 - измерительный луч левого датчика 9 - след плоскости симметрии инфракрасной преобразо-вательной пластинки Впл - ширина пластинки пл - длина инфракрасной преобразовательной пластинки- диаметр лучей датчиков А, Б - образующие цилиндров соответственно правого и левого лучей, совмещаемые с боковой плоскостью б инфракрасной преобразовательной пластанки на виде К О - общий центр для крайних точек расчтного Впл расстояния датчиков 2 - привязочный размер для плоскости симметрии инфракрасной преобразовательной пластинки Вп, Вл- расчтные расстояния соответственно для правого и левого датчиков Вп, Вл- расчтные расстояния, измеряемые (в процессе настройки) до пластины соответственно правым и левым датчиками (смотри описание фиг. 1) 11 центральная продольная метка на линии симметрии верхней плоскости вп инфракрасной преобразовательной пластинки для установки датчика 5 12,13- штрихи на расстояниидруг от друга соответственно правый и левый на расстоянии 2 относительно центрального штриха 11 каждый продольные совпадение образующих А и Б лучей 6 и 7 с плоскостью вп на фиг.1 показывает, что оси лучей датчиков 3 и 4 находятся в одной горизонтальной плоскости совпадение лучей А и Б с передней плоскостью п на фиг. 2 свидетельствует о совмещении лучей датчиков 3 и 4 в вертикальной плоскости 14, 15 - поперечные риски, расположенные- на расстоянии 2 от передней плоскости п точка пересечения рисок 11 и 14 проектируется наточку О(совмещения крайних точек расчтного расстояния лазерных датчиков) - общий центр для трх датчиков линии 10-15 служат для установки верхнего датчика вписыванием окружности 27 в образуемый квадрат с центром в точке О- вид по стрелке 17 вертикальная риска на передней поверхности п(расположена на оси симметрии) для совмещения образующей луча верхнего датчика с точкой 16,полученной от проекции образующей Г на плоскость вп на линию пересечения плоскостей вп и п. На фиг. 3 показаны 1 - инфракрасная преобразовательная пластинка 2 - опора для пластины 3,4 - правый и левый лазерные датчики 5/ 5 - верхний лазерный датчик 5/- диаметр лучей лазерных датчиков 3,4, 5 Г образующая луча верхнего датчика 5 на виде по стрелке , совмещаемая с передней поверхностью пластинки п Вв - расчтное расстояние для датчика 5 Вв - измеряемое расстояние до инфракрасной преобразовательной пластинки, измеренное датчиком 5 О -общий центр или точка совмещения крайних точек расчтных расстояний для датчиков 3, 4, 5 8 луч датчика 5 вп-верхняя плоскость инфракрасной преобразовательной пластинки, которой касаются лучи датчиков 3 и 4 (и вписанная в квадрат окружность 27 - поперечное сечение луча) 21805 образующие лучей датчиков 3 и 4 соответственно А и Б проектируются в точку 21 (Апр, Бпр) образующие соответственно Апр и Бпр проектируются в точку 22(Апр, Бпр) в точках 21 и 22 окружность диаметромлазерного луча вписывается в прямой угол на боковой стороне при верхней вершине пластины и оси лучей 3 и 4 проходят через точку О Нпл - высота инфракрасной преобразовательной пластинки- выступающая часть инфракрасной преобразовательной пластинки 18, 19 вертикальные риски на правой боковой поверхности п 20,23 - горизонтальные риски на правой боковой поверхности п на пересечении линий 19 и 23 лежит точка, в проекции совпадающая с точкой О, в которой сходятся крайние точки расчтных расстояний датчиков 3 и 4 линии 18 и 20 вместе с рбрами плоскостей вп и п образуют квадрат, в который вписывается окружность 27 диаметром(диаметр лучей датчиков 3 и 4) при совмещении осей лучей датчиков 21,22 - точки-проекции образующих лучей датчиков 3 и 4, совпадающие при настройке с плоскостями соответственно вп и п (образующих Апр, Бпр Апр, Бпр датчиков 3 и 4). На фиг. 4 показаны 1 - инфракрасная преобразовательная пластинка 2 опора инфракрасной преобразовательной пластинки 3,4 соответственно правый и левый лазерные датчики 5/ 5 -верхний лазерный датчик 5/- диаметры лучей датчиков 27 - окружность луча датчиков 3 и 4 в проекции на плоскостии л пл длина пластины Нпл - высота пластинывыступающая часть калибрующей пластины Вв расчтное расстояние для датчика 5 Вв - расстояние,измеряемое датчиком 5 до верхней плоскости вп при совпадении нижней точки расстояния с осями лучей 6 и 7 датчиков 3 и 4 8 - луч датчика 5 23,24 вертикальные риски на боковой плоскости бл расстояние между ребром плоскостей бл и п и 25, 26 - горизонтальные риски на боковой плоскости бл расстояния между рисками 25 и 26 равно 2 расстояние между рисками 25 и ребром граней вп и бл равно 2 фактическое измерение расстояния до пластинки Вв показывает, что при настройке достигнуто совмещение крайней точки расчтного расстояния Вв для датчика 5 с точкой совмещения крайних точек расчтного расстояния Вп и Вл соответственно для правого и левого датчиков 3 и 4,т.е., что все три датчика привязаны к общему центру О(при условии вписания окружности 27 на фиг.2 в квадрат между линиями 10-12 и 15-ребро от пересечения плоскостей вп и п 18 - ребро от пересечения плоскостей бп и п, 20 - ребро от пересечения плоскостей бп и п). На фиг. 5 показаны 1 - инфракрасная преобразовательная пластинка 2 - опора инфракрасной преобразовательной пластинки 3,4 соответственно правый и левый лазерные датчики 5/ 5 - верхний лазерный датчик 5/ О - общий центр или точка совмещения крайних точек опорных расстояний датчиков 3, 4, 5 6, 7, 8 - лучи(условно показаны осевые линии лучей) датчиков 3, 4,5, сходящиеся в точке О 28 - П-образная стойка для закрепления датчиков 5/ 3, 4, 5 29 основание прибора, на котором устанавливается Побразная стойка. Таким образом, при разработке способа привязки к одному центру трх лазерных датчиков 5/ для измерения расстояний использован в качестве аналога способ спаривания двух лазерных датчиков 5/ с помощью инфракрасной преобразовательной пластинки для совмещения лучей датчиков, совмещения в плоскости симметрии пластины крайних точек расчтного расстояния правым и левым датчиками 5/, и к этому центру привязывают третий лазерный датчик 5/. На инфракрасную преобразовательную пластинку наносят крестовые метки, образованные продольными и поперечными рисками на е верхней горизонтальной плоскости, горизонтальными и вертикальными рисками на е боковых вертикальных сторонах, и по обеим сторонам крестовых меток риски на расстоянии друг относительно друга и относительно центральных рисок для облегчения процесса привязки к одному центру трх лазерных датчиков. Спаривание двух боковых лазерных датчиков 5/ осуществляют способом настройки на измерение одного заданного расстояния до боковых вертикальных граней инфракрасной преобразовательной пластинки каждым лазерным датчиком,равного расчтному измеряемому датчиком расстоянию минус половина толщины пластинки. Спаривание двух боковых лазерных датчиков 5/ выполняют также с использованием совмещения образующих лучей датчиков в сечении горизонтальной и вертикальной осевой плоскостями с передней и верхней плоскостями инфракрасной преобразовательной пластинки, т.е. путм совмещения образующих лучей с центральными рисками на передней и верхней плоскостях инфракрасной преобразовательной пластинки. Дополнительным ориентиром при спаривании правого и левого датчиков служит вписанный круг от луча датчика в квадрат на боковых гранях инфракрасной преобразовательной пластинки,образованный горизонтальными и вертикальными линиями, нанеснными на пластинку. Для привязки третьего лазерного датчика к общему центру используют продольную и поперечную риски крестовой метки на верхней горизонтальной плоскости инфракрасной преобразовательной пластинки и вписанную окружность поперечного луча лазерного датчика в квадрате, образованном крайними продольными,задней поперечной метками и передним верхним ребром передней поверхности инфракрасной преобразовательной пластинки и касание окружностью средних точек на сторонах квадрата. Дополнительным ориентиром при привязке вертикального лазерного датчика служит совмещение центральной вертикальной риски на передней 5 21805 плоскости с образующей цилиндра светового луча датчика. Устройство для привязки лазерных датчиков 5/ к одному центру включает стойку,имеющую установочные элементы с заданными между ними расстоянием для установки датчиков, инфракрасную преобразовательную пластинку размером 2020 мм и подставку для инфракрасной преобразовательной пластинки, причм стойка выполнена двухсторонней, имеет П-образную форму для установки трх лазерных датчиков 5/ и подставку с пазом для установки инфракрасной преобразовательной пластинки, устанавливаемые при настройке в зону измерения (рабочее пространство) измерительного устройства (прибора), который не является предметом изобретения и в заявке не представлен. Использование для измерений высокоточных деталей трх лазерных датчиков 5/,привязанных к общему центру, повышает точность измерения, из результата измерения позволяет исключить погрешность, связанную с известным плаванием оси детали при повороте в центрах при контроле различных машиностроительных изделий,изделий приборостроения, получать комплексную картину отклонений от круглости, цилиндричности и т.д. Использованные источники 1 -. 2 Промышленное применение лазеров/Под ред. Г. Кебнера перевод с англ. М. Машиностроение, 1988. с.280. 3 Рабинович А.Н. Приборы и системы автоматического контроля размеров деталей машин. Киев , 1970. - с. 456. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ привязки к одному центру лазерных датчиков 5/ для измерения расстояний с использованием инфракрасной преобразовательной пластинки для спаривания двух лазерных датчиков 5/, совмещения лучей датчиков с помощью инфракрасной преобразовательной пластинки,совмещения в плоскости симметрии пластины крайних точек наибольшего расчтного расстояния правого и левого датчиков 5/,отличающийся тем, что к одному центру привязывают три лазерных датчика 5/. 2. Устройство для привязки лазерных датчиков 5/ к одному центру, которое включает стойку, имеющую установочные элементы с заданными между ними расстоянием для установки датчиков,инфракрасную преобразовательную пластинку размером 2020 мм и подставку для инфракрасной преобразовательной пластинки,отличающееся тем, что стойка выполнена двухсторонней, т.е. имеет П-образную форму, для установки трх лазерных датчиков 5/ и подставку с пазом. 3. Устройство по п.2, отличающееся тем, что на инфракрасную преобразовательную пластинку наносят крестовые метки, образованные продольными и поперечными рисками на е верхней горизонтальной плоскости, горизонтальными и вертикальными рисками на е боковых вертикальных сторонах, и по обеим сторонам крестовых меток риски на расстоянии/2 друг относительно друга и относительно центральных рисок и образуют квадрат. 4. Способ по п.1, отличающийся тем, что спаривание двух боковых лазерных датчиков 5/ выполняют с использованием совмещения образующих лучей датчиков в сечении горизонтальной и вертикальной осевой плоскостями с передней и верхней плоскостями инфракрасной преобразовательной пластинки. 5. Способ по п.п. 1, 4, отличающийся тем, что при спаривании двух боковых лазерных датчиков используют дополнительную настройку путм совмещения образующих лучей с центральными рисками на передней и верхней плоскостях инфракрасной преобразовательной пластинки. 6. Способ по п.п. 1,4, отличающийся тем, что дополнительным ориентиром при спаривании правого и левого лазерных датчиков служит вписанный круг от луча датчика в квадрат на боковых гранях инфракрасной преобразовательной пластинки,образованный горизонтальными и вертикальными линиями, нанеснными на пластинку. 7. Способ по п. 1, отличающийся тем, что для привязки третьего лазерного датчика к общему центру используют измерение расстояния до пластинки,равного расчтному измерительному расстоянию датчика минус половина диаметра луча датчика. 8. Способ по п.п. 1,4, 7, отличающийся тем,что для привязки третьего лазерного датчика к общему центру используют крестовую метку на верхней горизонтальной плоскости инфракрасной преобразовательной пластинки. 9. Способ по п.п. 1,4, 7, отличающийся тем,что для привязки третьего лазерного датчика к общему центру используют вписанную окружность поперечного луча лазерного датчика в квадрате,образованном крайними продольными, задней поперечной метками и передним верхним ребром передней поверхности инфракрасной преобразовательной пластинки и касание окружностью средних точек на сторонах квадрата. 10. Способ по п.п. 1, 4, 7, отличающийся тем,что дополнительным ориентиром при привязке третьего, вертикального лазерного датчика служит совмещение центральной вертикальной риски крестовой метки на передней плоскости пластинки с образующей цилиндра светового луча датчика.
МПК / Метки
МПК: G01B 11/08
Метки: одному, центру, способ, лазерных, привязки, трех, устройство, датчиков
Код ссылки
<a href="https://kz.patents.su/11-21805-sposob-i-ustrojjstvo-privyazki-treh-lazernyh-datchikov-m5-laser-k-odnomu-centru.html" rel="bookmark" title="База патентов Казахстана">Способ и устройство привязки трех лазерных датчиков М5/Laser к одному центру</a>
Способ спаривания лазерных датчиков М5/Laser с помощью концевой меры
Номер инновационного патента: 19946
Опубликовано: 15.08.2008
Авторы: Дудак Николай Степанович, Искакова Динара Алтынбековна
Метки: меры, спаривания, концевой, датчиков, помощью, способ, лазерных
Формула / Реферат:
Способ спаривания лазерных датчиков M5/Laser для расширения диапазона величины контролируемых размеров изделий с помощью датчиков с повышенной точностью измерения, достигающийся путём использования концевой меры для спаривания датчиков.
1) 1 с.п.ф.
2) 2 з.п.ф.
3) 1 иллюстр.
Способ измерения отклонений от цилиндричности и от круглости одним, двумя, тремя лазерными датчиками М5/Laser при продольном перемещении датчиков (способ последовательных осевых сечений – неподвижных образующих)
Номер инновационного патента: 19945
Опубликовано: 15.08.2008
Авторы: Искакова Динара Алтынбековна, Дудак Николай Степанович
МПК: G01B 11/08
Метки: датчиками, продольном, отклонений, датчиков, неподвижных, тремя, способ, двумя, одним, перемещении, круглости, цилиндричности, сечений, измерения, лазерными, последовательных, образующих, осевых
Формула / Реферат:
Способ измерения диаметра, отклонений от прямолинейности образующих и от цилиндричности одним, двумя, тремя лазерными датчиками М5 / Laser (способ последовательных осевых сечений - неподвижных образующих) - общее название способа, основанного на измерении отклонений от прямолинейности образующих при продольном перемещений датчиков при измерении.Измерения отклонений от прямолинейности образующих и диаметра основаны на измерении прямолинейности и...
Способ измерения отклонений от прямолинейности образующих и диаметра одним, двумя, тремя лазерными датчиками М5/Laser при продольном перемещении датчиков (способ последовательных осевых сечений – неподвижных образующих)
Номер инновационного патента: 20580
Опубликовано: 15.12.2008
Авторы: Искакова Динара Алтынбековна, Дудак Николай Степанович
МПК: G01B 11/08
Метки: способ, датчиками, датчиков, образующих, тремя, сечений, последовательных, отклонений, диаметра, двумя, продольном, одним, осевых, лазерными, измерения, перемещении, неподвижных, прямолинейности
Формула / Реферат:
Способ измерения диаметра, отклонений от прямолинейности образующих одним, двумя, тремя лазерными датчиками М5/Laser (способ последовательных осевых сечений - неподвижных образующих) - общее название способа, осно-ванного на измерении отклонений от прямолинейности образующих при продольном перемещении датчиков при измерении.Измерения отклонений от прямолинейности образующих и диаметра основаны на измерении прямолинейности и взаимного положения...
Способ измерения отклонений от круглости и диаметра одним, двумя, тремя лазерными датчиками с продольным перемещением датчиков от сечения к сечению (способ последовательных неподвижных сечений – направляющих)
Номер инновационного патента: 19941
Опубликовано: 15.08.2008
Авторы: Искакова Динара Алтынбековна, Дудак Николай Степанович
МПК: G01B 11/08
Метки: тремя, отклонений, круглости, перемещением, одним, сечению, двумя, способ, датчиков, лазерными, последовательных, продольным, сечения, измерения, датчиками, направляющих, неподвижных, сечений, диаметра
Формула / Реферат:
Разработан способ измерения диаметра и отклонений от круглости с использованием одного, двух, трёх лазерных датчиков. Для повышения точности измерения используется третий лазерный датчик. Общее название способа измерения диаметра, отклонений от круглости «способ неподвижных направляющих», при котором выбор сечения для измерения осуществляется перемещением датчиков вдоль оси детали.При измерении деталей до восьмого квалитета точности используется...
Сегмент опорного элемента датчиков устройства скребкового типа, опорный элемент датчиков и устройство скребкового типа
Номер предварительного патента: 16862
Опубликовано: 16.01.2006
Авторы: ВАЙТ, Кристиан, РИХТЕР, Томас, ШВАРЦ, Аксел
МПК: F16L 55/26
Метки: элемент, типа, устройства, датчиков, скребкового, элемента, устройство, сегмент, опорный, опорного
Формула / Реферат:
Изобретение относится к сегментам опорного элемента датчиков для устройства скребкового типа, состоящий по меньшей мере из двух пар преимущественно параллельных подвижных блоков, расположенных друг за другом. Между, по меньшей мере, одной парой подвижных блоков расположена опорная плита для датчиков. Сегмент может сочетаться с другими сегментами, образуя опорный элемент датчиков, отличающийся высокой эксплуатационной и функциональной надежностью...
Предыдущий патент: Многофункциональное устройство для мембранного сжатия воздуха
Следующий патент: Способ термомеханических испытаний материалов и устройство для его осуществления
Случайный патент: Cинтетическая среда для кратковременного хранения спермы баранов