Способ управления движением транспортных средств на руднике и транспортная система (варианты)
Формула / Реферат
Предлагаемое изобретение относится к способу управления движением транспортных средств на руднике. Данный способ включает в себя: построение рудничных транспортных средств в колонну, состоящую из множества рудничных транспортных средств, поставленных в ряд друг за другом без механической связи между ними; управление движением каждого рудничного транспортного средства в колонне посредством средств управления, имеющихся на каждом транспортном средстве; назначение одного из рудничных транспортных средств в колонне в качестве ведущей машины и остальных машин в колонне в качестве ведомых машин; управление ведущей машиной в колонне вручную, контролируемое оператором; автоматический контроль движения ведомых машин в колонне на основе маршрута, проложенного ведущей машиной; контроль за соблюдением дистанции между двумя машинами, следующими друг за другом в колонне; регулирование скорости движения машин в колонне для предотвращения столкновений между машинами.
Данное изобретение, кроме того, относится к транспортной системе для рудника, включающей в себя: по меньшей мере, одну колонну из множества рудничных транспортных средств, поставленных в ряд друг за другом без механической связи между ними; средства управления в каждом рудничном транспортном средстве для самостоятельного управления движением этих транспортных средств, контролируемого оператором и блоком управления данного рудничного транспортного средства; по меньшей мере, один блок управления для системы управления транспортом; по меньшей мере, один канал передачи данных между блоками управления; назначение первой машины в колонне в качестве ведущей машины, управление движением которой осуществляется вручную и контролируется оператором; обеспечение того, что ведомые машины, двигающиеся за ведущей машиной, автоматически в соответствии с командами с блока управления следуют по маршруту, проложенному ведущей машиной; систему управления транспортом, включающую в себя, по меньшей мере, подсистемы управлении в первой рабочей зоне и второй рабочей зоне, а также по дороге между этими двумя зонами.
Преимущество данного изобретения состоит в том, что сравнительно просто можно осуществить передвижение рудничных транспортных средств между рабочими зонами в колоннах. Кроме того, так как колонна машин расформировывается в рабочей зоне и каждое рудничное транспортное средство в этой рабочей зоне двигается независимо от других машин, то также не представляет особой сложности контролировать и управлять движением каждого такого отдельного транспортного средства в рабочей зоне. Кроме того, система управления транспортом в соответствии с данным изобретением не требует внесения каких-либо существенных изменений в постоянную инфраструктуру рудника, поэтому ввести в действие такую систему управления транспортом можно быстро и без проблем.
Текст
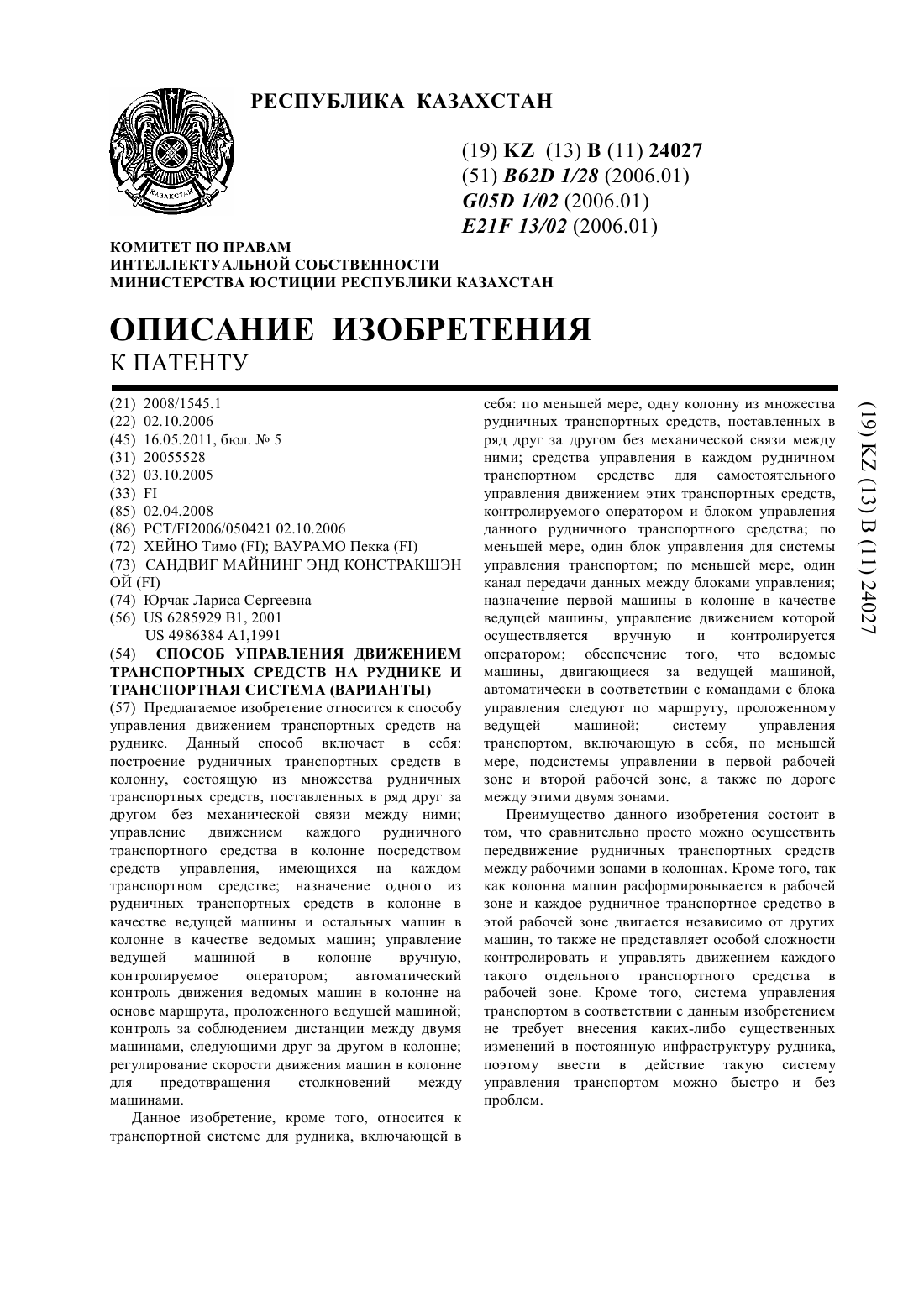
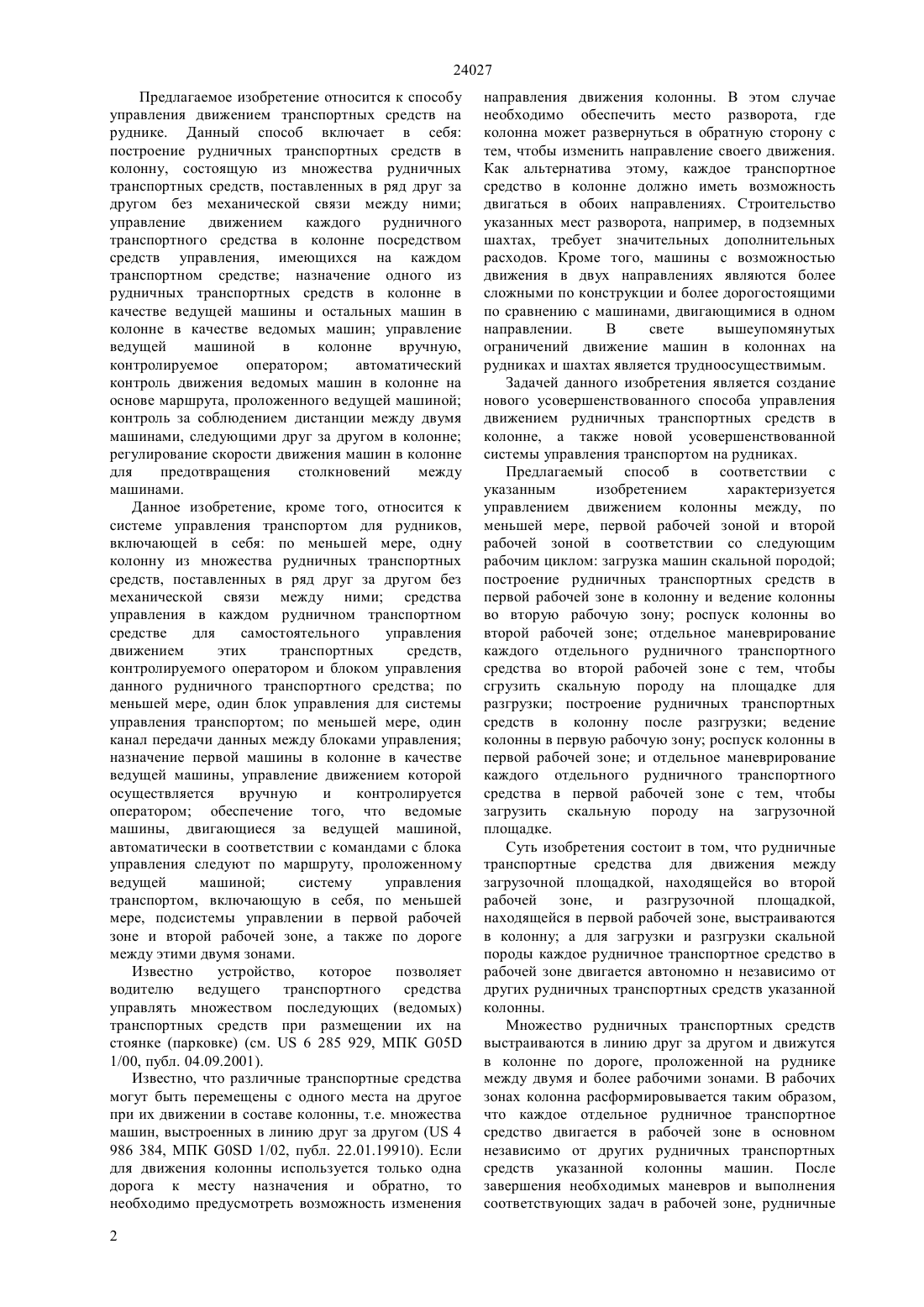
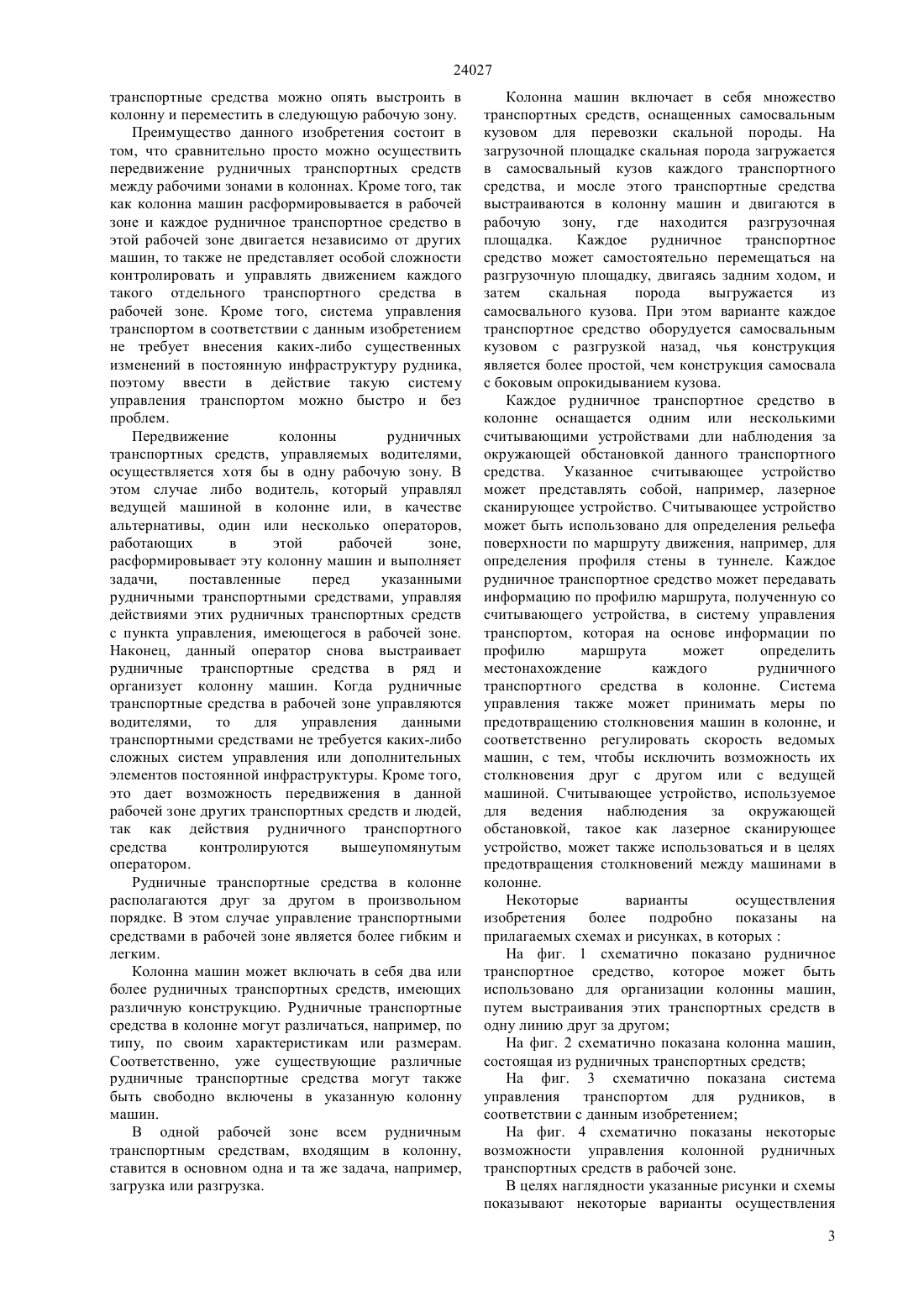
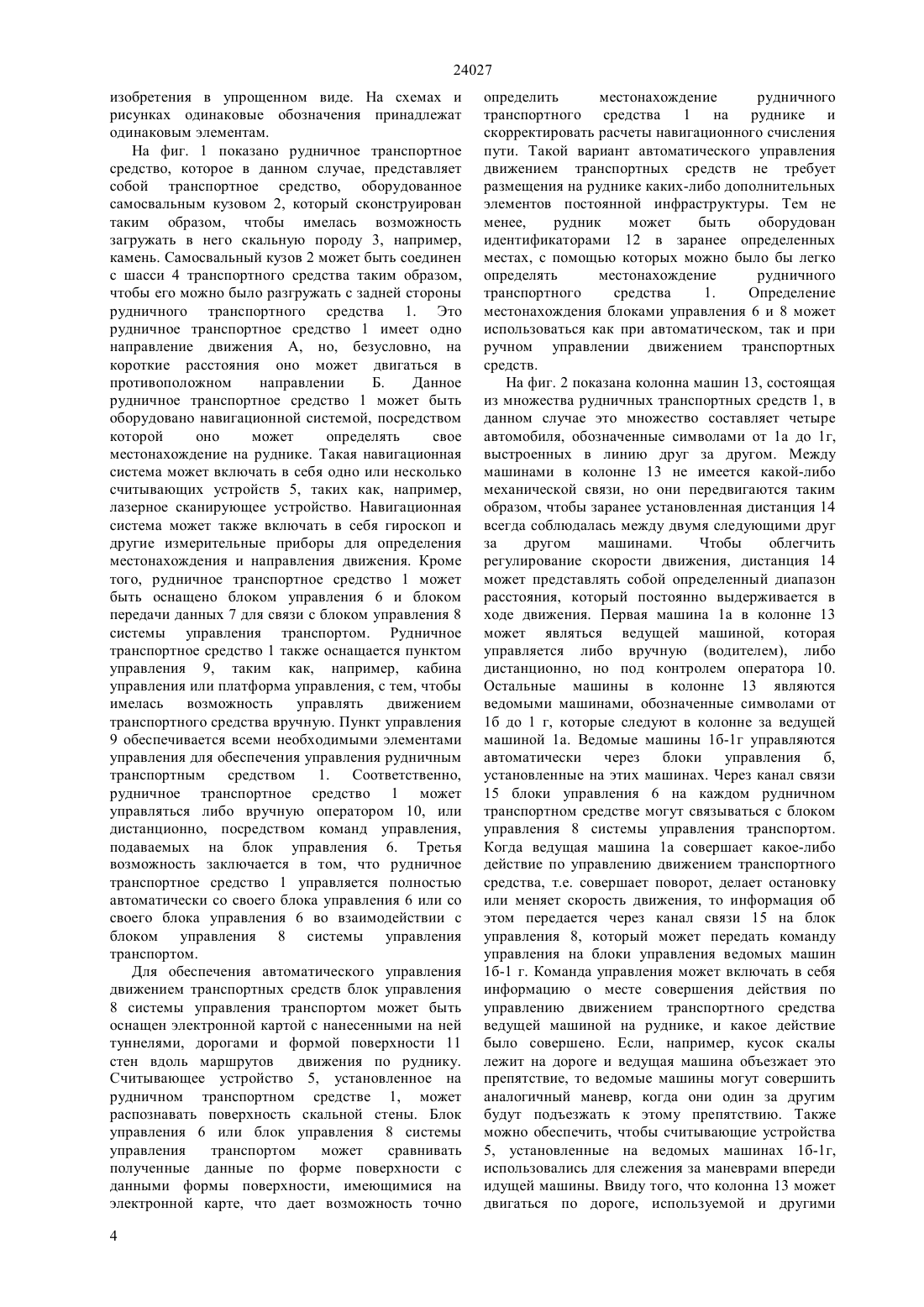
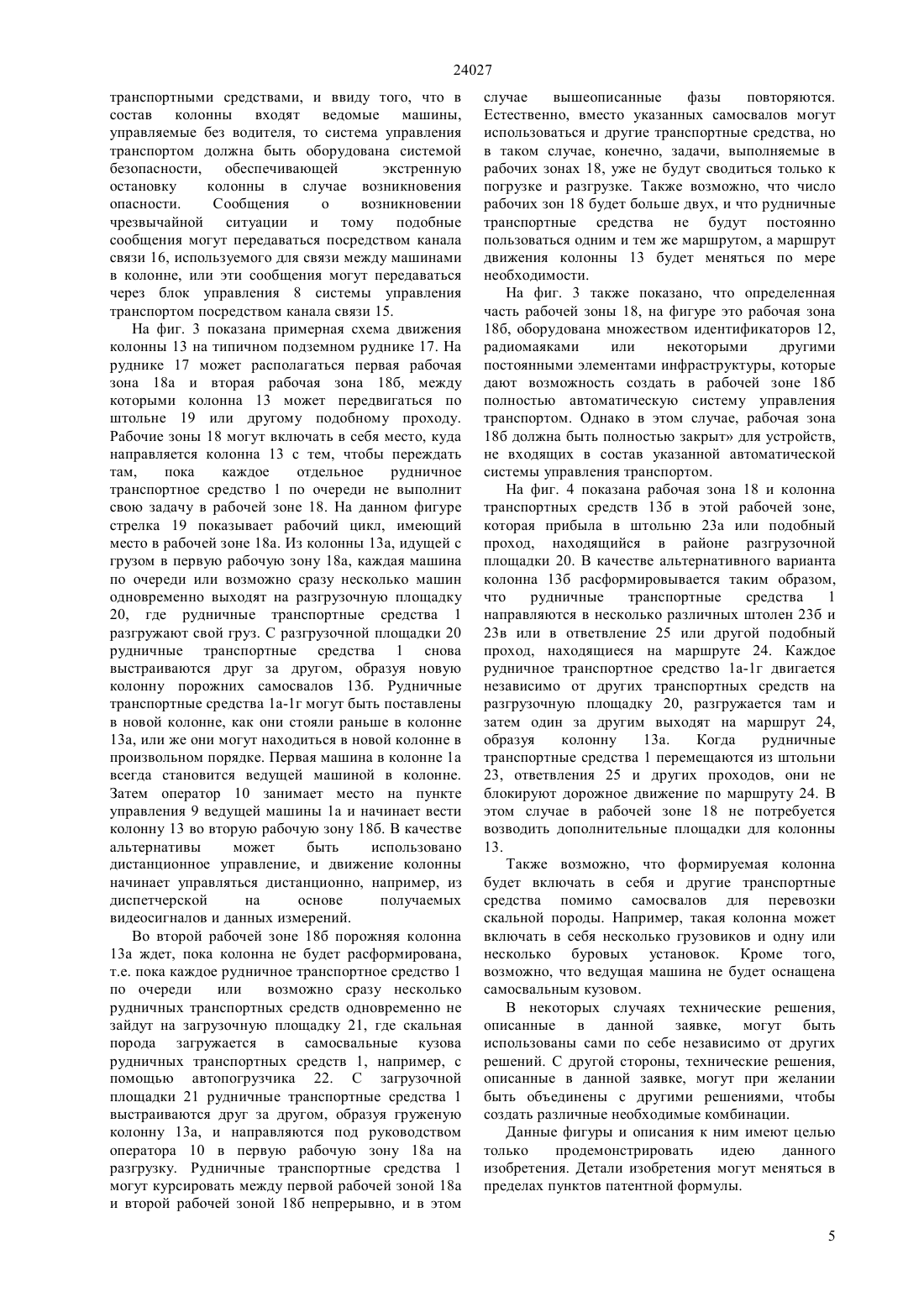
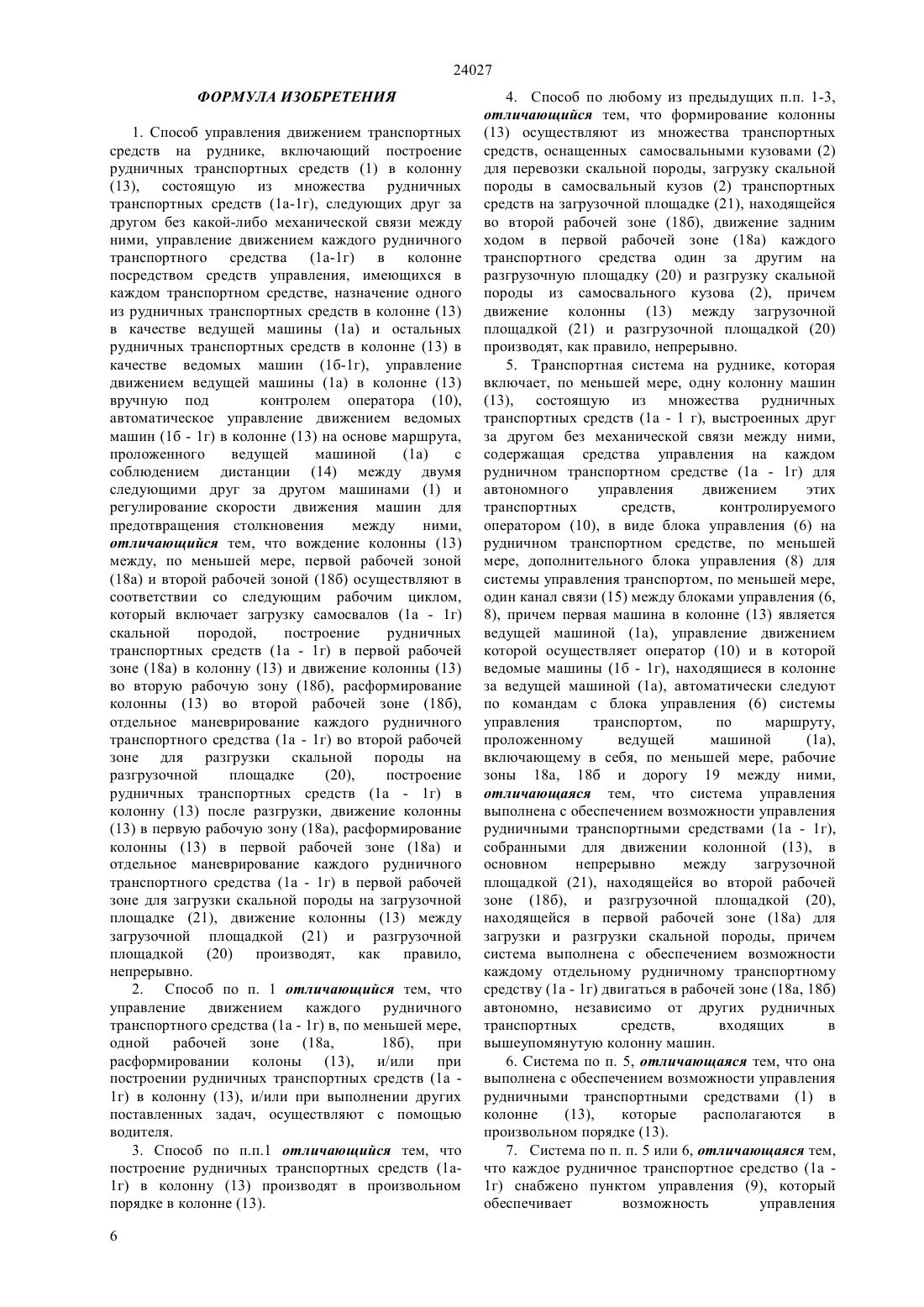
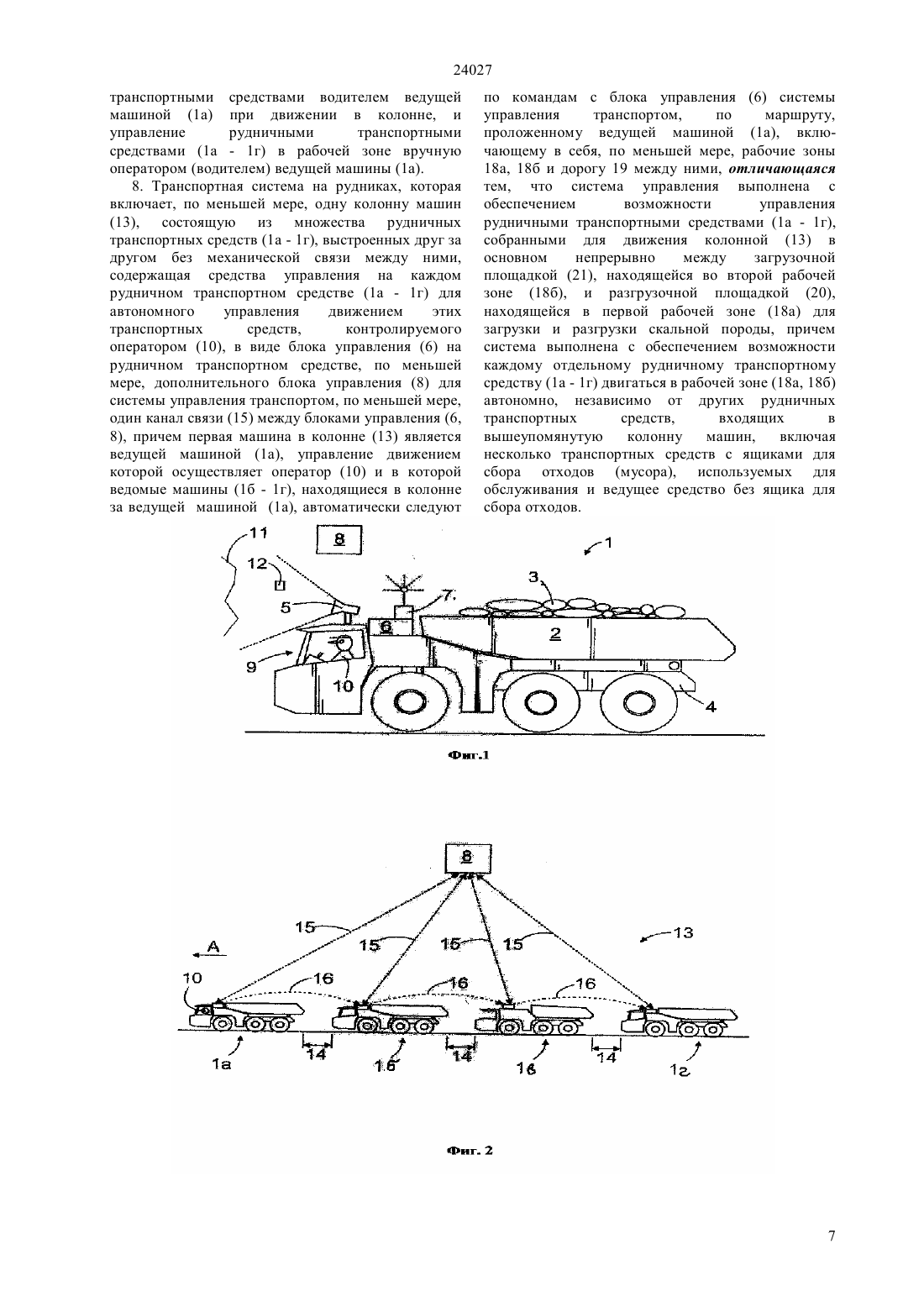
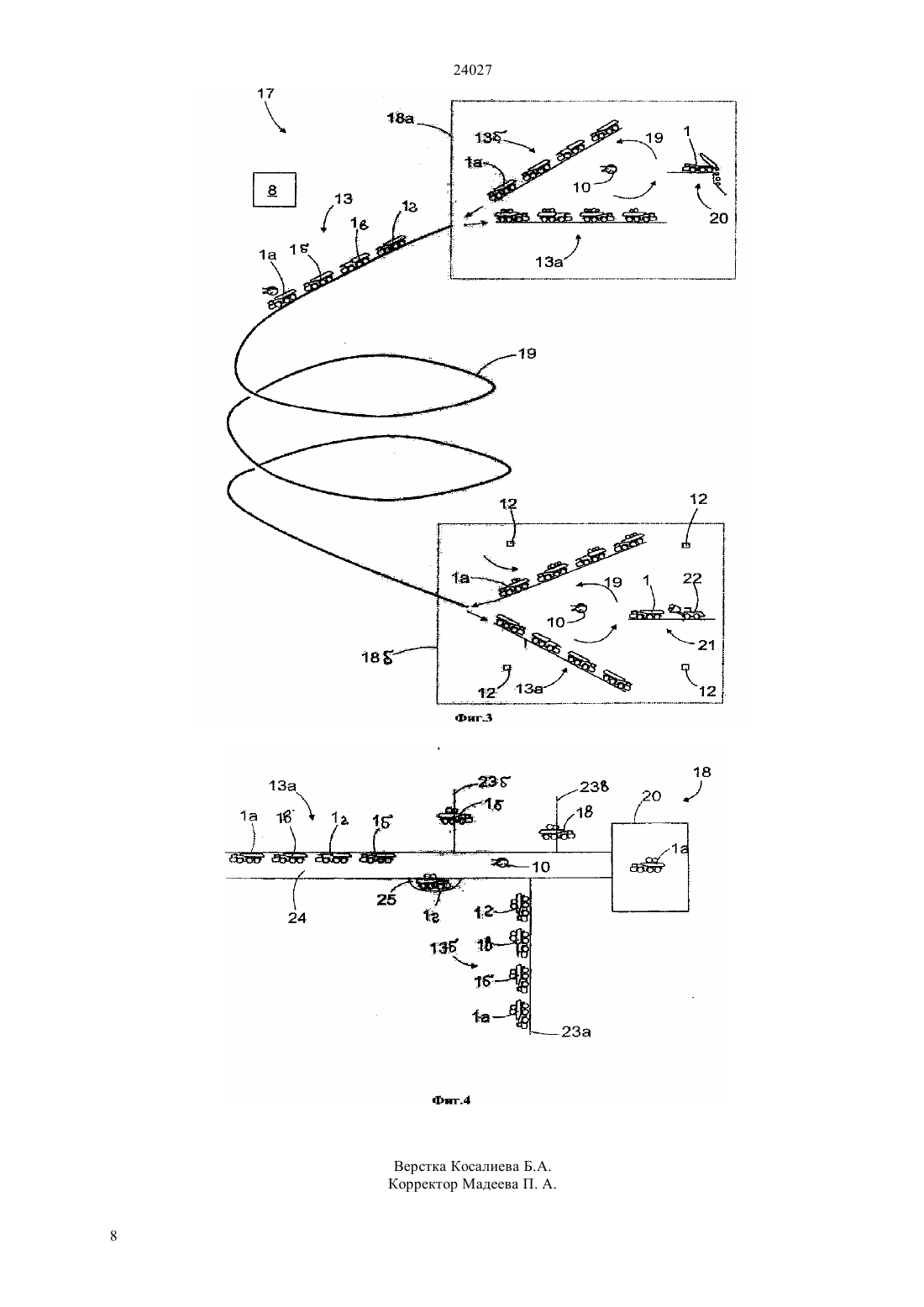
(51) 62 1/28 (2006.01) 05 1/02 (2006.01) 21 13/02 (2006.01) КОМИТЕТ ПО ПРАВАМ ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ МИНИСТЕРСТВА ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ПАТЕНТУ себя по меньшей мере, одну колонну из множества рудничных транспортных средств, поставленных в ряд друг за другом без механической связи между ними средства управления в каждом рудничном транспортном средстве для самостоятельного управления движением этих транспортных средств,контролируемого оператором и блоком управления данного рудничного транспортного средства по меньшей мере, один блок управления для системы управления транспортом по меньшей мере, один канал передачи данных между блоками управления назначение первой машины в колонне в качестве ведущей машины, управление движением которой осуществляется вручную и контролируется оператором обеспечение того, что ведомые машины, двигающиеся за ведущей машиной,автоматически в соответствии с командами с блока управления следуют по маршруту, проложенному ведущей машиной систему управления транспортом, включающую в себя, по меньшей мере, подсистемы управлении в первой рабочей зоне и второй рабочей зоне, а также по дороге между этими двумя зонами. Преимущество данного изобретения состоит в том, что сравнительно просто можно осуществить передвижение рудничных транспортных средств между рабочими зонами в колоннах. Кроме того, так как колонна машин расформировывается в рабочей зоне и каждое рудничное транспортное средство в этой рабочей зоне двигается независимо от других машин, то также не представляет особой сложности контролировать и управлять движением каждого такого отдельного транспортного средства в рабочей зоне. Кроме того, система управления транспортом в соответствии с данным изобретением не требует внесения каких-либо существенных изменений в постоянную инфраструктуру рудника,поэтому ввести в действие такую систему управления транспортом можно быстро и без проблем.(73) САНДВИГ МАЙНИНГ ЭНД КОНСТРАКШЭН ОЙ(54) СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНЫХ СРЕДСТВ НА РУДНИКЕ И ТРАНСПОРТНАЯ СИСТЕМА (ВАРИАНТЫ)(57) Предлагаемое изобретение относится к способу управления движением транспортных средств на руднике. Данный способ включает в себя построение рудничных транспортных средств в колонну, состоящую из множества рудничных транспортных средств, поставленных в ряд друг за другом без механической связи между ними управление движением каждого рудничного транспортного средства в колонне посредством средств управления, имеющихся на каждом транспортном средстве назначение одного из рудничных транспортных средств в колонне в качестве ведущей машины и остальных машин в колонне в качестве ведомых машин управление ведущей машиной в колонне вручную,контролируемое оператором автоматический контроль движения ведомых машин в колонне на основе маршрута, проложенного ведущей машиной контроль за соблюдением дистанции между двумя машинами, следующими друг за другом в колонне регулирование скорости движения машин в колонне для предотвращения столкновений между машинами. Данное изобретение, кроме того, относится к транспортной системе для рудника, включающей в 24027 Предлагаемое изобретение относится к способу управления движением транспортных средств на руднике. Данный способ включает в себя построение рудничных транспортных средств в колонну, состоящую из множества рудничных транспортных средств, поставленных в ряд друг за другом без механической связи между ними управление движением каждого рудничного транспортного средства в колонне посредством средств управления, имеющихся на каждом транспортном средстве назначение одного из рудничных транспортных средств в колонне в качестве ведущей машины и остальных машин в колонне в качестве ведомых машин управление ведущей машиной в колонне вручную,контролируемое оператором автоматический контроль движения ведомых машин в колонне на основе маршрута, проложенного ведущей машиной контроль за соблюдением дистанции между двумя машинами, следующими друг за другом в колонне регулирование скорости движения машин в колонне для предотвращения столкновений между машинами. Данное изобретение, кроме того, относится к системе управления транспортом для рудников,включающей в себя по меньшей мере, одну колонну из множества рудничных транспортных средств, поставленных в ряд друг за другом без механической связи между ними средства управления в каждом рудничном транспортном средстве для самостоятельного управления движением этих транспортных средств,контролируемого оператором и блоком управления данного рудничного транспортного средства по меньшей мере, один блок управления для системы управления транспортом по меньшей мере, один канал передачи данных между блоками управления назначение первой машины в колонне в качестве ведущей машины, управление движением которой осуществляется вручную и контролируется оператором обеспечение того, что ведомые машины, двигающиеся за ведущей машиной,автоматически в соответствии с командами с блока управления следуют по маршруту, проложенному ведущей машиной систему управления транспортом, включающую в себя, по меньшей мере, подсистемы управлении в первой рабочей зоне и второй рабочей зоне, а также по дороге между этими двумя зонами. Известно устройство,которое позволяет водителю ведущего транспортного средства управлять множеством последующих (ведомых) транспортных средств при размещении их на стоянке (парковке) (см.6 285 929, МПК 05 1/00, публ. 04.09.2001). Известно, что различные транспортные средства могут быть перемещены с одного места на другое при их движении в составе колонны, т.е. множества машин, выстроенных в линию друг за другом ( 4 986 384, МПК 0 1/02, публ. 22.01.19910). Если для движения колонны используется только одна дорога к месту назначения и обратно, то необходимо предусмотреть возможность изменения 2 направления движения колонны. В этом случае необходимо обеспечить место разворота, где колонна может развернуться в обратную сторону с тем, чтобы изменить направление своего движения. Как альтернатива этому, каждое транспортное средство в колонне должно иметь возможность двигаться в обоих направлениях. Строительство указанных мест разворота, например, в подземных шахтах, требует значительных дополнительных расходов. Кроме того, машины с возможностью движения в двух направлениях являются более сложными по конструкции и более дорогостоящими по сравнению с машинами, двигающимися в одном направлении. В свете вышеупомянутых ограничений движение машин в колоннах на рудниках и шахтах является трудноосуществимым. Задачей данного изобретения является создание нового усовершенствованного способа управления движением рудничных транспортных средств в колонне, а также новой усовершенствованной системы управления транспортом на рудниках. Предлагаемый способ в соответствии с указанным изобретением характеризуется управлением движением колонны между, по меньшей мере, первой рабочей зоной и второй рабочей зоной в соответствии со следующим рабочим циклом загрузка машин скальной породой построение рудничных транспортных средств в первой рабочей зоне в колонну и ведение колонны во вторую рабочую зону роспуск колонны во второй рабочей зоне отдельное маневрирование каждого отдельного рудничного транспортного средства во второй рабочей зоне с тем, чтобы сгрузить скальную породу на площадке для разгрузки построение рудничных транспортных средств в колонну после разгрузки ведение колонны в первую рабочую зону роспуск колонны в первой рабочей зоне и отдельное маневрирование каждого отдельного рудничного транспортного средства в первой рабочей зоне с тем, чтобы загрузить скальную породу на загрузочной площадке. Суть изобретения состоит в том, что рудничные транспортные средства для движения между загрузочной площадкой, находящейся во второй рабочей зоне, и разгрузочной площадкой,находящейся в первой рабочей зоне, выстраиваются в колонну а для загрузки и разгрузки скальной породы каждое рудничное транспортное средство в рабочей зоне двигается автономно н независимо от других рудничных транспортных средств указанной колонны. Множество рудничных транспортных средств выстраиваются в линию друг за другом и движутся в колонне по дороге, проложенной на руднике между двумя и более рабочими зонами. В рабочих зонах колонна расформировывается таким образом,что каждое отдельное рудничное транспортное средство двигается в рабочей зоне в основном независимо от других рудничных транспортных средств указанной колонны машин. После завершения необходимых маневров и выполнения соответствующих задач в рабочей зоне, рудничные 24027 транспортные средства можно опять выстроить в колонну и переместить в следующую рабочую зону. Преимущество данного изобретения состоит в том, что сравнительно просто можно осуществить передвижение рудничных транспортных средств между рабочими зонами в колоннах. Кроме того, так как колонна машин расформировывается в рабочей зоне и каждое рудничное транспортное средство в этой рабочей зоне двигается независимо от других машин, то также не представляет особой сложности контролировать и управлять движением каждого такого отдельного транспортного средства в рабочей зоне. Кроме того, система управления транспортом в соответствии с данным изобретением не требует внесения каких-либо существенных изменений в постоянную инфраструктуру рудника,поэтому ввести в действие такую систему управления транспортом можно быстро и без проблем. Передвижение колонны рудничных транспортных средств, управляемых водителями,осуществляется хотя бы в одну рабочую зону. В этом случае либо водитель, который управлял ведущей машиной в колонне или, в качестве альтернативы, один или несколько операторов,работающих в этой рабочей зоне,расформировывает эту колонну машин и выполняет задачи,поставленные перед указанными рудничными транспортными средствами, управляя действиями этих рудничных транспортных средств с пункта управления, имеющегося в рабочей зоне. Наконец, данный оператор снова выстраивает рудничные транспортные средства в ряд и организует колонну машин. Когда рудничные транспортные средства в рабочей зоне управляются водителями,то для управления данными транспортными средствами не требуется каких-либо сложных систем управления или дополнительных элементов постоянной инфраструктуры. Кроме того,это дает возможность передвижения в данной рабочей зоне других транспортных средств и людей,так как действия рудничного транспортного средства контролируются вышеупомянутым оператором. Рудничные транспортные средства в колонне располагаются друг за другом в произвольном порядке. В этом случае управление транспортными средствами в рабочей зоне является более гибким и легким. Колонна машин может включать в себя два или более рудничных транспортных средств, имеющих различную конструкцию. Рудничные транспортные средства в колонне могут различаться, например, по типу, по своим характеристикам или размерам. Соответственно, уже существующие различные рудничные транспортные средства могут также быть свободно включены в указанную колонну машин. В одной рабочей зоне всем рудничным транспортным средствам, входящим в колонну,ставится в основном одна и та же задача, например,загрузка или разгрузка. Колонна машин включает в себя множество транспортных средств, оснащенных самосвальным кузовом для перевозки скальной породы. На загрузочной площадке скальная порода загружается в самосвальный кузов каждого транспортного средства, и мосле этого транспортные средства выстраиваются в колонну машин и двигаются в рабочую зону, где находится разгрузочная площадка. Каждое рудничное транспортное средство может самостоятельно перемещаться на разгрузочную площадку, двигаясь задним ходом, и затем скальная порода выгружается из самосвального кузова. При этом варианте каждое транспортное средство оборудуется самосвальным кузовом с разгрузкой назад, чья конструкция является более простой, чем конструкция самосвала с боковым опрокидыванием кузова. Каждое рудничное транспортное средство в колонне оснащается одним или несколькими считывающими устройствами дли наблюдения за окружающей обстановкой данного транспортного средства. Указанное считывающее устройство может представлять собой, например, лазерное сканирующее устройство. Считывающее устройство может быть использовано для определения рельефа поверхности по маршруту движения, например, для определения профиля стены в туннеле. Каждое рудничное транспортное средство может передавать информацию по профилю маршрута, полученную со считывающего устройства, в систему управления транспортом, которая на основе информации по профилю маршрута может определить местонахождение каждого рудничного транспортного средства в колонне. Система управления также может принимать меры по предотвращению столкновения машин в колонне, и соответственно регулировать скорость ведомых машин, с тем, чтобы исключить возможность их столкновения друг с другом или с ведущей машиной. Считывающее устройство, используемое для ведения наблюдения за окружающей обстановкой, такое как лазерное сканирующее устройство, может также использоваться и в целях предотвращения столкновений между машинами в колонне. Некоторые варианты осуществления изобретения более подробно показаны на прилагаемых схемах и рисунках, в которыхНа фиг. 1 схематично показано рудничное транспортное средство, которое может быть использовано для организации колонны машин,путем выстраивания этих транспортных средств в одну линию друг за другом На фиг. 2 схематично показана колонна машин,состоящая из рудничных транспортных средств На фиг. 3 схематично показана система управления транспортом для рудников,в соответствии с данным изобретением На фиг. 4 схематично показаны некоторые возможности управления колонной рудничных транспортных средств в рабочей зоне. В целях наглядности указанные рисунки и схемы показывают некоторые варианты осуществления 3 24027 изобретения в упрощенном виде. На схемах и рисунках одинаковые обозначения принадлежат одинаковым элементам. На фиг. 1 показано рудничное транспортное средство, которое в данном случае, представляет собой транспортное средство, оборудованное самосвальным кузовом 2, который сконструирован таким образом, чтобы имелась возможность загружать в него скальную породу 3, например,камень. Самосвальный кузов 2 может быть соединен с шасси 4 транспортного средства таким образом,чтобы его можно было разгружать с задней стороны рудничного транспортного средства 1. Это рудничное транспортное средство 1 имеет одно направление движения А, но, безусловно, на короткие расстояния оно может двигаться в противоположном направлении Б. Данное рудничное транспортное средство 1 может быть оборудовано навигационной системой, посредством которой оно может определять свое местонахождение на руднике. Такая навигационная система может включать в себя одно или несколько считывающих устройств 5, таких как, например,лазерное сканирующее устройство. Навигационная система может также включать в себя гироскоп и другие измерительные приборы для определения местонахождения и направления движения. Кроме того, рудничное транспортное средство 1 может быть оснащено блоком управления 6 и блоком передачи данных 7 для связи с блоком управления 8 системы управления транспортом. Рудничное транспортное средство 1 также оснащается пунктом управления 9, таким как, например, кабина управления или платформа управления, с тем, чтобы имелась возможность управлять движением транспортного средства вручную. Пункт управления 9 обеспечивается всеми необходимыми элементами управления для обеспечения управления рудничным транспортным средством 1. Соответственно,рудничное транспортное средство 1 может управляться либо вручную оператором 10, или дистанционно, посредством команд управления,подаваемых на блок управления 6. Третья возможность заключается в том, что рудничное транспортное средство 1 управляется полностью автоматически со своего блока управления 6 или со своего блока управления 6 во взаимодействии с блоком управления 8 системы управления транспортом. Для обеспечения автоматического управления движением транспортных средств блок управления 8 системы управления транспортом может быть оснащен электронной картой с нанесенными на ней туннелями, дорогами и формой поверхности 11 стен вдоль маршрутов движения по руднику. Считывающее устройство 5, установленное на рудничном транспортном средстве 1, может распознавать поверхность скальной стены. Блок управления 6 или блок управления 8 системы управления транспортом может сравнивать полученные данные по форме поверхности с данными формы поверхности, имеющимися на электронной карте, что дает возможность точно 4 определить местонахождение рудничного транспортного средства 1 на руднике и скорректировать расчеты навигационного счисления пути. Такой вариант автоматического управления движением транспортных средств не требует размещения на руднике каких-либо дополнительных элементов постоянной инфраструктуры. Тем не менее,рудник может быть оборудован идентификаторами 12 в заранее определенных местах, с помощью которых можно было бы легко определять местонахождение рудничного транспортного средства 1. Определение местонахождения блоками управления 6 и 8 может использоваться как при автоматическом, так и при ручном управлении движением транспортных средств. На фиг. 2 показана колонна машин 13, состоящая из множества рудничных транспортных средств 1, в данном случае это множество составляет четыре автомобиля, обозначенные символами от 1 а до 1 г,выстроенных в линию друг за другом. Между машинами в колонне 13 не имеется какой-либо механической связи, но они передвигаются таким образом, чтобы заранее установленная дистанция 14 всегда соблюдалась между двумя следующими друг за другом машинами. Чтобы облегчить регулирование скорости движения, дистанция 14 может представлять собой определенный диапазон расстояния, который постоянно выдерживается в ходе движения. Первая машина 1 а в колонне 13 может являться ведущей машиной, которая управляется либо вручную (водителем), либо дистанционно, но под контролем оператора 10. Остальные машины в колонне 13 являются ведомыми машинами, обозначенные символами от 1 б до 1 г, которые следуют в колонне за ведущей машиной 1 а. Ведомые машины 1 б-1 г управляются автоматически через блоки управления б,установленные на этих машинах. Через канал связи 15 блоки управления 6 на каждом рудничном транспортном средстве могут связываться с блоком управления 8 системы управления транспортом. Когда ведущая машина 1 а совершает какое-либо действие по управлению движением транспортного средства, т.е. совершает поворот, делает остановку или меняет скорость движения, то информация об этом передается через канал связи 15 на блок управления 8, который может передать команду управления на блоки управления ведомых машин 1 б-1 г. Команда управления может включать в себя информацию о месте совершения действия по управлению движением транспортного средства ведущей машиной на руднике, и какое действие было совершено. Если, например, кусок скалы лежит на дороге и ведущая машина объезжает это препятствие, то ведомые машины могут совершить аналогичный маневр, когда они один за другим будут подъезжать к этому препятствию. Также можно обеспечить, чтобы считывающие устройства 5, установленные на ведомых машинах 1 б-1 г,использовались для слежения за маневрами впереди идущей машины. Ввиду того, что колонна 13 может двигаться по дороге, используемой и другими 24027 транспортными средствами, и ввиду того, что в состав колонны входят ведомые машины,управляемые без водителя, то система управления транспортом должна быть оборудована системой безопасности, обеспечивающей экстренную остановку колонны в случае возникновения опасности. Сообщения о возникновении чрезвычайной ситуации и тому подобные сообщения могут передаваться посредством канала связи 16, используемого для связи между машинами в колонне, или эти сообщения могут передаваться через блок управления 8 системы управления транспортом посредством канала связи 15. На фиг. 3 показана примерная схема движения колонны 13 на типичном подземном руднике 17. На руднике 17 может располагаться первая рабочая зона 18 а и вторая рабочая зона 18 б, между которыми колонна 13 может передвигаться по штольне 19 или другому подобному проходу. Рабочие зоны 18 могут включать в себя место, куда направляется колонна 13 с тем, чтобы переждать там,пока каждое отдельное рудничное транспортное средство 1 по очереди не выполнит свою задачу в рабочей зоне 18. На данном фигуре стрелка 19 показывает рабочий цикл, имеющий место в рабочей зоне 18 а. Из колонны 13 а, идущей с грузом в первую рабочую зону 18 а, каждая машина по очереди или возможно сразу несколько машин одновременно выходят на разгрузочную площадку 20, где рудничные транспортные средства 1 разгружают свой груз. С разгрузочной площадки 20 рудничные транспортные средства 1 снова выстраиваются друг за другом, образуя новую колонну порожних самосвалов 13 б. Рудничные транспортные средства 1 а-1 г могут быть поставлены в новой колонне, как они стояли раньше в колонне 13 а, или же они могут находиться в новой колонне в произвольном порядке. Первая машина в колонне 1 а всегда становится ведущей машиной в колонне. Затем оператор 10 занимает место на пункте управления 9 ведущей машины 1 а и начинает вести колонну 13 во вторую рабочую зону 18 б. В качестве альтернативы может быть использовано дистанционное управление, и движение колонны начинает управляться дистанционно, например, из диспетчерской на основе получаемых видеосигналов и данных измерений. Во второй рабочей зоне 18 б порожняя колонна 13 а ждет, пока колонна не будет расформирована,т.е. пока каждое рудничное транспортное средство 1 по очереди или возможно сразу несколько рудничных транспортных средств одновременно не зайдут на загрузочную площадку 21, где скальная порода загружается в самосвальные кузова рудничных транспортных средств 1, например, с помощью автопогрузчика 22. С загрузочной площадки 21 рудничные транспортные средства 1 выстраиваются друг за другом, образуя груженую колонну 13 а, и направляются под руководством оператора 10 в первую рабочую зон 18 а на разгрузку. Рудничные транспортные средства 1 могут курсировать между первой рабочей зоной 18 а и второй рабочей зоной 18 б непрерывно, и в этом случае вышеописанные фазы повторяются. Естественно, вместо указанных самосвалов могут использоваться и другие транспортные средства, но в таком случае, конечно, задачи, выполняемые в рабочих зонах 18, уже не будут сводиться только к погрузке и разгрузке. Также возможно, что число рабочих зон 18 будет больше двух, и что рудничные транспортные средства не будут постоянно пользоваться одним и тем же маршрутом, а маршрут движения колонны 13 будет меняться по мере необходимости. На фиг. 3 также показано, что определенная часть рабочей зоны 18, на фигуре это рабочая зона 18 б, оборудована множеством идентификаторов 12,радиомаяками или некоторыми другими постоянными элементами инфраструктуры, которые дают возможность создать в рабочей зоне 18 б полностью автоматическую систему управления транспортом. Однако в этом случае, рабочая зона 18 б должна быть полностью закрыт для устройств,не входящих в состав указанной автоматической системы управления транспортом. На фиг. 4 показана рабочая зона 18 и колонна транспортных средств 13 б в этой рабочей зоне,которая прибыла в штольню 23 а или подобный проход, находящийся в районе разгрузочной площадки 20. В качестве альтернативного варианта колонна 13 б расформировывается таким образом,что рудничные транспортные средства 1 направляются в несколько различных штолен 23 б и 23 в или в ответвление 25 или другой подобный проход, находящиеся на маршруте 24. Каждое рудничное транспортное средство 1 а-1 г двигается независимо от других транспортных средств на разгрузочную площадку 20, разгружается там и затем один за другим выходят на маршрут 24,образуя колонну 13 а. Когда рудничные транспортные средства 1 перемещаются из штольни 23, ответвления 25 и других проходов, они не блокируют дорожное движение по маршруту 24. В этом случае в рабочей зоне 18 не потребуется возводить дополнительные площадки для колонны 13. Также возможно, что формируемая колонна будет включать в себя и другие транспортные средства помимо самосвалов для перевозки скальной породы. Например, такая колонна может включать в себя несколько грузовиков и одну или несколько буровых установок. Кроме того,возможно, что ведущая машина не будет оснащена самосвальным кузовом. В некоторых случаях технические решения,описанные в данной заявке, могут быть использованы сами по себе независимо от других решений. С другой стороны, технические решения,описанные в данной заявке, могут при желании быть объединены с другими решениями, чтобы создать различные необходимые комбинации. Данные фигуры и описания к ним имеют целью только продемонстрировать идею данного изобретения. Детали изобретения могут меняться в пределах пунктов патентной формулы. 5 24027 ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ управления движением транспортных средств на руднике, включающий построение рудничных транспортных средств (1) в колонну(13), состоящую из множества рудничных транспортных средств (1 а-1 г), следующих друг за другом без какой-либо механической связи между ними, управление движением каждого рудничного транспортного средства (1 а-1 г) в колонне посредством средств управления, имеющихся в каждом транспортном средстве, назначение одного из рудничных транспортных средств в колонне (13) в качестве ведущей машины (1 а) и остальных рудничных транспортных средств в колонне (13) в качестве ведомых машин (1 б-1 г), управление движением ведущей машины (1 а) в колонне (13) вручную под контролем оператора (10),автоматическое управление движением ведомых машин (1 б - 1 г) в колонне (13) на основе маршрута,проложенного ведущей машиной(1 а) с соблюдением дистанции (14) между двумя следующими друг за другом машинами (1) и регулирование скорости движения машин для предотвращения столкновения между ними,отличающийся тем, что вождение колонны (13) между, по меньшей мере, первой рабочей зоной(18 а) и второй рабочей зоной (18 б) осуществляют в соответствии со следующим рабочим циклом,который включает загрузку самосвалов (1 а - 1 г) скальной породой,построение рудничных транспортных средств (1 а - 1 г) в первой рабочей зоне (18 а) в колонну (13) и движение колонны (13) во вторую рабочую зону (18 б), расформирование колонны (13) во второй рабочей зоне (18 б),отдельное маневрирование каждого рудничного транспортного средства (1 а - 1 г) во второй рабочей зоне для разгрузки скальной породы на разгрузочной площадке(20),построение рудничных транспортных средств (1 а - 1 г) в колонну (13) после разгрузки, движение колонны(13) в первую рабочую зону (18 а), расформирование колонны (13) в первой рабочей зоне (18 а) и отдельное маневрирование каждого рудничного транспортного средства (1 а - 1 г) в первой рабочей зоне для загрузки скальной породы на загрузочной площадке (21), движение колонны (13) между загрузочной площадкой (21) и разгрузочной площадкой (20) производят, как правило,непрерывно. 2. Способ по п. 1 отличающийся тем, что управление движением каждого рудничного транспортного средства (1 а - 1 г) в, по меньшей мере,одной рабочей зоне (18 а,18 б),при расформировании колоны (13), и/или при построении рудничных транспортных средств (1 а 1 г) в колонну (13), и/или при выполнении других поставленных задач, осуществляют с помощью водителя. 3. Способ по п.п.1 отличающийся тем, что построение рудничных транспортных средств (1 а 1 г) в колонну (13) производят в произвольном порядке в колонне (13). 6 4. Способ по любому из предыдущих п.п. 1-3,отличающийся тем, что формирование колонны(13) осуществляют из множества транспортных средств, оснащенных самосвальными кузовами (2) для перевозки скальной породы, загрузку скальной породы в самосвальный кузов (2) транспортных средств на загрузочной площадке (21), находящейся во второй рабочей зоне (18 б), движение задним ходом в первой рабочей зоне (18 а) каждого транспортного средства один за другим на разгрузочную площадку (20) и разгрузку скальной породы из самосвального кузова (2), причем движение колонны (13) между загрузочной площадкой (21) и разгрузочной площадкой (20) производят, как правило, непрерывно. 5. Транспортная система на руднике, которая включает, по меньшей мере, одну колонну машин(13), состоящую из множества рудничных транспортных средств (1 а - 1 г), выстроенных друг за другом без механической связи между ними,содержащая средства управления на каждом рудничном транспортном средстве (1 а - 1 г) для автономного управления движением этих транспортных средств,контролируемого оператором (10), в виде блока управления (6) на рудничном транспортном средстве, по меньшей мере, дополнительного блока управления (8) для системы управления транспортом, по меньшей мере,один канал связи (15) между блоками управления (6,8), причем первая машина в колонне (13) является ведущей машиной (1 а), управление движением которой осуществляет оператор (10) и в которой ведомые машины (1 б - 1 г), находящиеся в колонне за ведущей машиной (1 а), автоматически следуют по командам с блока управления (6) системы управления транспортом,по маршруту,проложенному ведущей машиной(1 а),включающему в себя, по меньшей мере, рабочие зоны 18 а, 18 б и дорогу 19 между ними,отличающаяся тем, что система управления выполнена с обеспечением возможности управления рудничными транспортными средствами (1 а - 1 г),собранными для движении колонной (13), в основном непрерывно между загрузочной площадкой (21), находящейся во второй рабочей зоне (18 б), и разгрузочной площадкой (20),находящейся в первой рабочей зоне (18 а) для загрузки и разгрузки скальной породы, причем система выполнена с обеспечением возможности каждому отдельному рудничному транспортному средству (1 а - 1 г) двигаться в рабочей зоне (18 а, 18 б) автономно, независимо от других рудничных транспортных средств,входящих в вышеупомянутую колонну машин. 6. Система по п. 5, отличающаяся тем, что она выполнена с обеспечением возможности управления рудничными транспортными средствами (1) в колонне(13),которые располагаются в произвольном порядке (13). 7. Система по п. п. 5 или 6, отличающаяся тем,что каждое рудничное транспортное средство (1 а 1 г) снабжено пунктом управления (9), который обеспечивает возможность управления 24027 транспортными средствами водителем ведущей машиной (1 а) при движении в колонне, и управление рудничными транспортными средствами (1 а - 1 г) в рабочей зоне вручную оператором (водителем) ведущей машины (1 а). 8. Транспортная система на рудниках, которая включает, по меньшей мере, одну колонну машин(13), состоящую из множества рудничных транспортных средств (1 а - 1 г), выстроенных друг за другом без механической связи между ними,содержащая средства управления на каждом рудничном транспортном средстве (1 а - 1 г) для автономного управления движением этих транспортных средств,контролируемого оператором (10), в виде блока управления (6) на рудничном транспортном средстве, по меньшей мере, дополнительного блока управления (8) для системы управления транспортом, по меньшей мере,один канал связи (15) между блоками управления (6,8), причем первая машина в колонне (13) является ведущей машиной (1 а), управление движением которой осуществляет оператор (10) и в которой ведомые машины (1 б - 1 г), находящиеся в колонне за ведущей машиной (1 а), автоматически следуют по командам с блока управления (6) системы управления транспортом,по маршруту,проложенному ведущей машиной (1 а), включающему в себя, по меньшей мере, рабочие зоны 18 а, 18 б и дорогу 19 между ними, отличающаяся тем, что система управления выполнена с обеспечением возможности управления рудничными транспортными средствами (1 а - 1 г),собранными для движения колонной (13) в основном непрерывно между загрузочной площадкой (21), находящейся во второй рабочей зоне (18 б), и разгрузочной площадкой (20),находящейся в первой рабочей зоне (18 а) для загрузки и разгрузки скальной породы, причем система выполнена с обеспечением возможности каждому отдельному рудничному транспортному средству (1 а - 1 г) двигаться в рабочей зоне (18 а, 18 б) автономно, независимо от других рудничных транспортных средств,входящих в вышеупомянутую колонну машин,включая несколько транспортных средств с ящиками для сбора отходов (мусора), используемых для обслуживания и ведущее средство без ящика для сбора отходов.
МПК / Метки
МПК: E21F 13/02, G05D 1/02, B62D 1/28
Метки: движением, руднике, транспортная, транспортных, варианты, средств, способ, управления, система
Код ссылки
<a href="https://kz.patents.su/8-24027-sposob-upravleniya-dvizheniem-transportnyh-sredstv-na-rudnike-i-transportnaya-sistema-varianty.html" rel="bookmark" title="База патентов Казахстана">Способ управления движением транспортных средств на руднике и транспортная система (варианты)</a>
Способ управления перемещением транспортных средств и система для его осуществления
Номер предварительного патента: 18410
Опубликовано: 16.04.2007
Автор: Агишев Сергей Газизович
МПК: G08G 1/00
Метки: перемещением, управления, способ, транспортных, система, средств, осуществления
Формула / Реферат:
Изобретение относится к способам и системам управления перемещения водного или воздушного, или наземного транспорта вне мегаполюсов, и предназначено для представления водителям возможности выбора оптимальных маршрутов движения.Способ управления перемещением транспортных средств, согласно которому для представления транспортной обстановки все пространство условно разбивают на объединенные в центральном компьютере регионы, каждый из которых имеет...
Система контроля движения транспортных средств
Номер предварительного патента: 7944
Опубликовано: 16.08.1999
Авторы: Муканов Димкеш Муканович, Моисеенко Владимир Юрьевич, Колесников Александр Владимирович
МПК: G08C 19/28
Метки: средств, движения, транспортных, система, контроля
Формула / Реферат:
Изобретение относится к области автоматизации диспетчерского управления пассажирским транспортом и может быть использовано для управления движением автобусов.Для повышения надежности работы и быстродействия система контроля движения транспортных средств содержит устройство контроля подвижной единицы, установленное на транспортном средстве, с приемником и передатчиком, пункты контроля с приемником и передатчиком, центральный блок управления, в...
Способ автоматического управления движением самоходных транспортных машин и устройство для его осуществления
Номер предварительного патента: 5650
Опубликовано: 15.01.1998
Авторы: Кремер Олег Григорьевич, Стрельцова Галина Альбертовна
МПК: A01B 69/04
Метки: способ, самоходных, автоматического, движением, устройство, осуществления, транспортных, машин, управления
Формула / Реферат:
Изобретение относится к области автоматического управления движением самоходных транспортных машин.Технический результат - повышение точности и надежности определения местоположения транспорта на маршруте.Способ автоматического управления движением самоходных транспортных машин, включающий создание электромагнитной волны вдоль ориентирующего провода, замер ее параметров и определение местоположения машины по расстоянию от узлов и пучностей,...
Система освещения транспортных средств
Номер предварительного патента: 6547
Опубликовано: 15.09.1998
Автор: Розанов Сергей Павлович
МПК: B60Q 1/02
Метки: средств, транспортных, освещения, система
Формула / Реферат:
Изобретение относится к области автомобилест-роения, в частности к системам освещения транспортных средств.Техническим результатом изобретения является устранение ослепления водителей транспортных средств путем увеличения яркости фона дорожного полотна и его обочины.Указанный результат достигается тем, что система освещения транспортного средства, например, автомобиля или мотоцикла, включающая фары, установленные на передней части транспортного...
Способ автоматического управления движением самоходных транспортных машин и устройство для его осуществления
Номер патента: 1749
Опубликовано: 15.03.1995
Авторы: Кокетаев Аскарбек Ильясович, Аспандияров Адиль Турсунович, Кремер Олег Григорьевич
МПК: A01B 69/04
Метки: машин, автоматического, самоходных, управления, транспортных, устройство, осуществления, способ, движением
Формула / Реферат:
1. Способ автоматического управления движением самоходных транспортных машин, включающий создание стоячей электромагнитной волны вдоль ориентирующих проводов, выделение падающей и отраженной электромагнитных волн,замер их параметров стоячей водный определение местоположения машины по расстоянию от узлов и пучностей, отличающийся тем, что, с целью повышения надежности определения местоположения машины на маршруте, после выделения падающей и...
Следующий патент: Вагонный штабель, преимущественно труб, железнодорожного вагона-платформы
Случайный патент: Твердо-жидкостной шламовый реактор