Программоноситель автомата
Номер патента: 1975
Опубликовано: 15.03.1995
Авторы: Иванов Константин Самсонович, Аскаров Ерлан Сейткасымович

Формула / Реферат
Изобретение относится к машиностроению и может быть использовано в цикловых автоматических устройствах в качестве программоносителя, например, в сборочных автоматах. Цель изобретения - повышение производительности за счет сокращения времени на переналадку и повышение надежности. Программоноситель автомата содержит приводной вал, кинематически связанный с ведомым валом, кулачок, закрепленный на ведомом валу, толкатель, установленный перпендикулярно ведомому валу с возможностью осевого перемещения в неподвижной направляющей и взаимодействия с кулачком и связанный с исполнительным органом посредством шарикового передаточного механизма. Программоноситель автомата снабжен диском-шатуном и подпружиненным упором, установленным на дополнительно введенном кронштейне перпендикулярно оси ведомого вала, при этом кулачок выполнен в виде эксцентрика, а диск-шатун выполнен в виде круга с цилиндрическим отверстием, в котором размещен эксцентрик, и снабжен упором, закрепленным перпендикулярно на торце круга с возможностью взаимодействия с подпружиненным упором, причем центр цилиндрического отверстия смещен относительно центра диска-шатуна на величину эксцентриситета эксцентрика, а толкатель установлен с возможностью взаимодействия с цилиндрической поверхностью диска-шатуна, при этом кинематическая связь приводного вала с ведомым валом выполнена в виде кулисы, установленной на конце ведомого вала с возможностью вращения и фиксации относительно последнего и кривошипа, аналогично установленного на конце приводного вала с возможностью взаимодействия с кулисой, причем оси вращения приводного и ведомого валов смещены относительно друг друга.
Текст
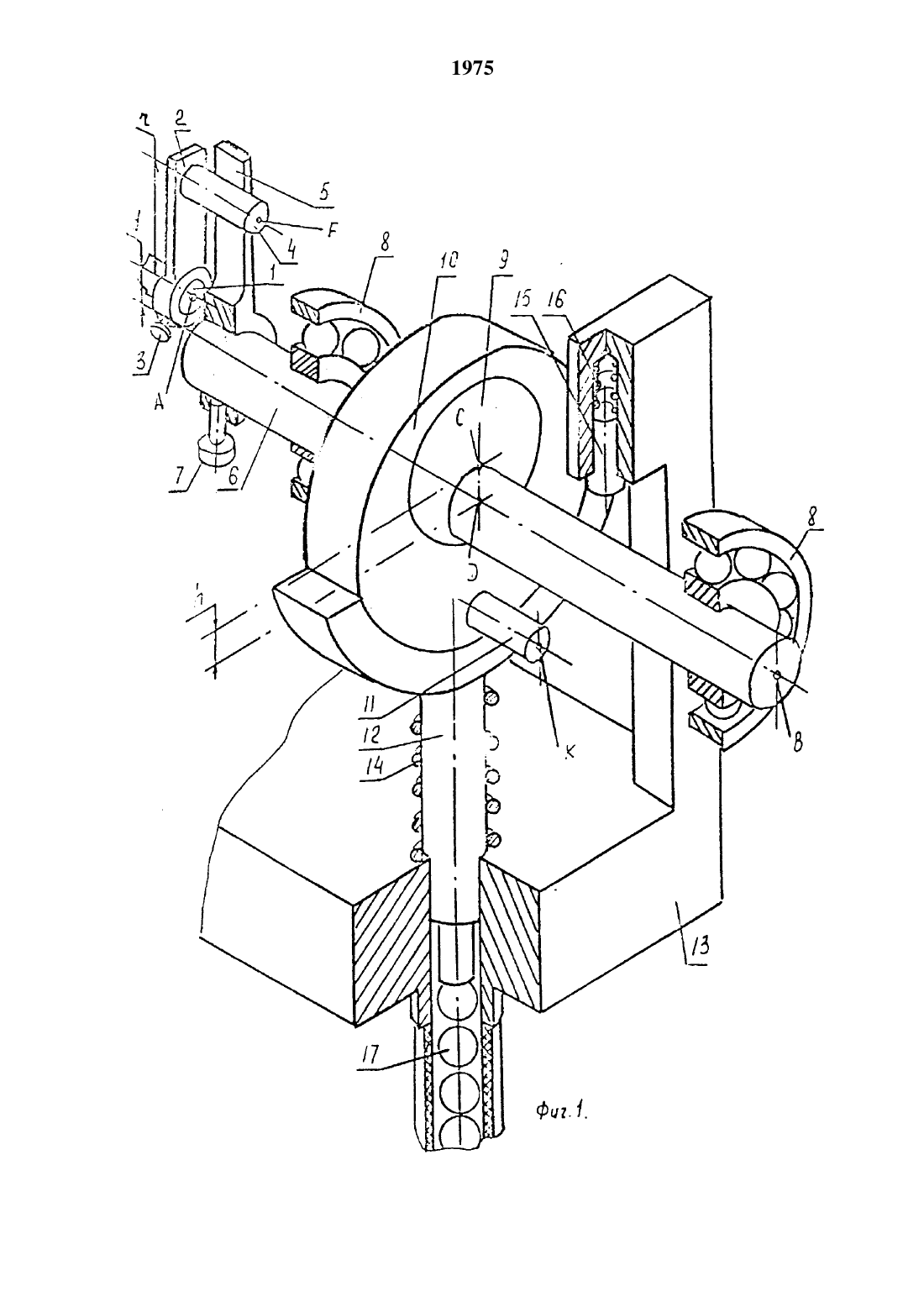
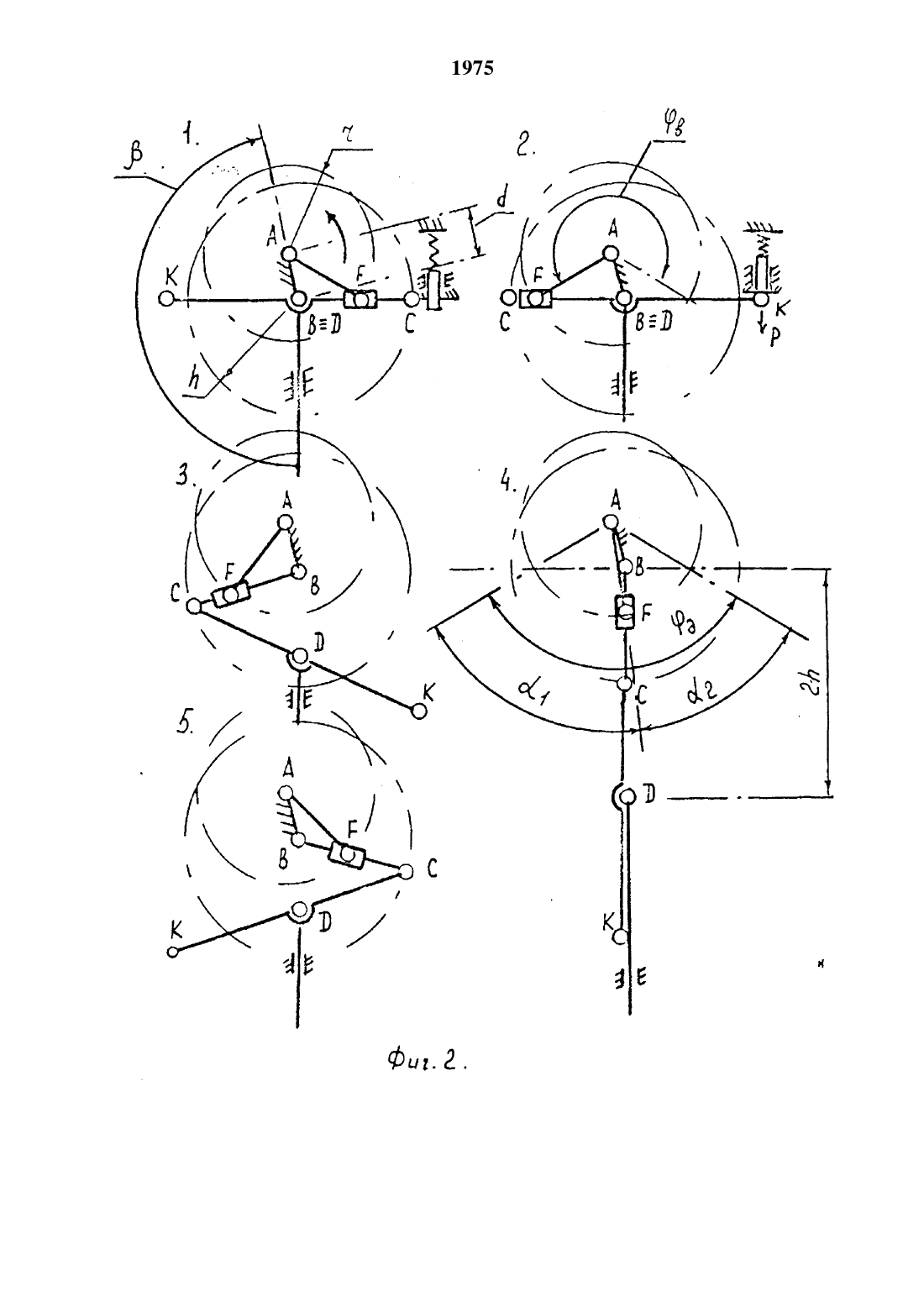
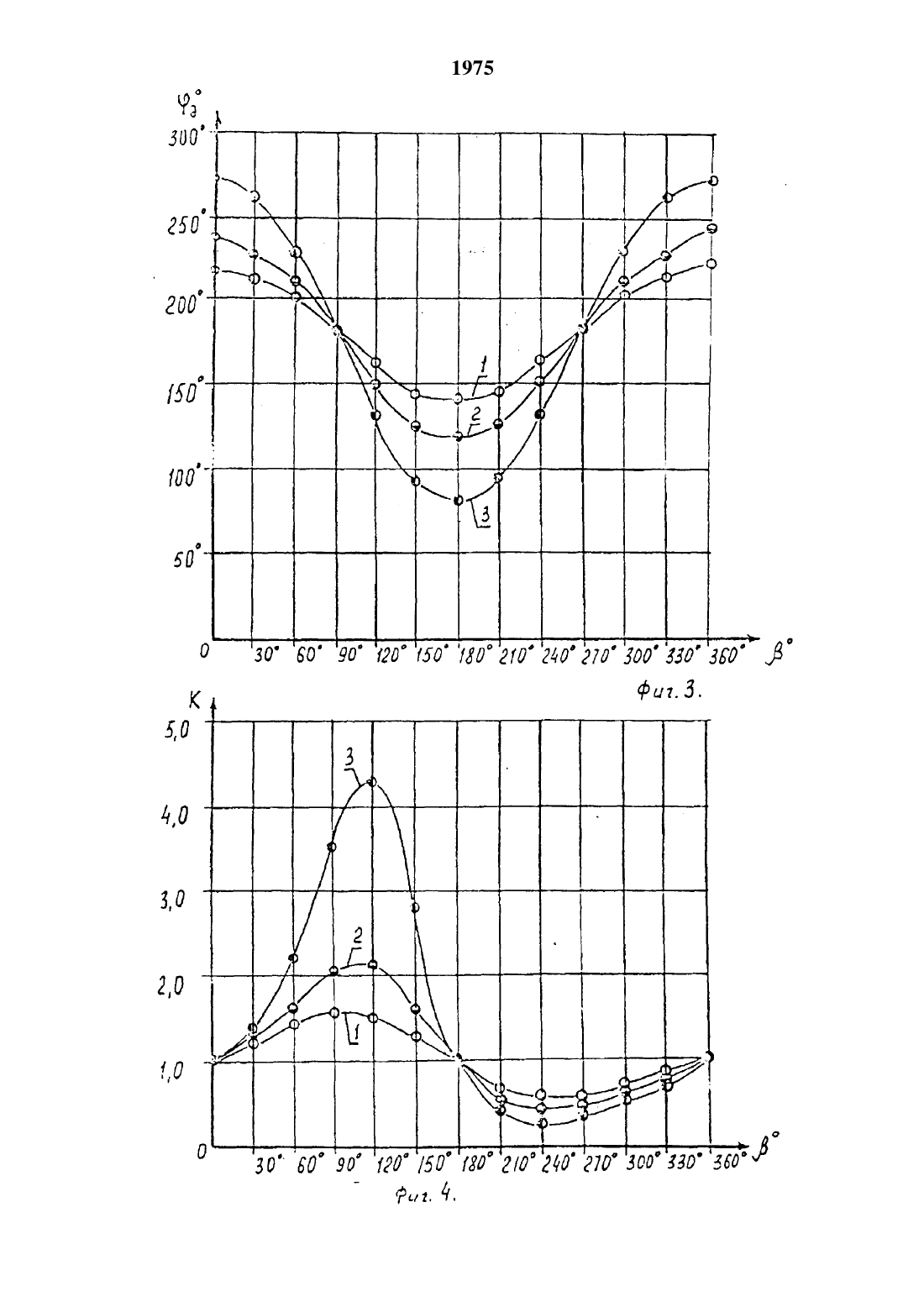
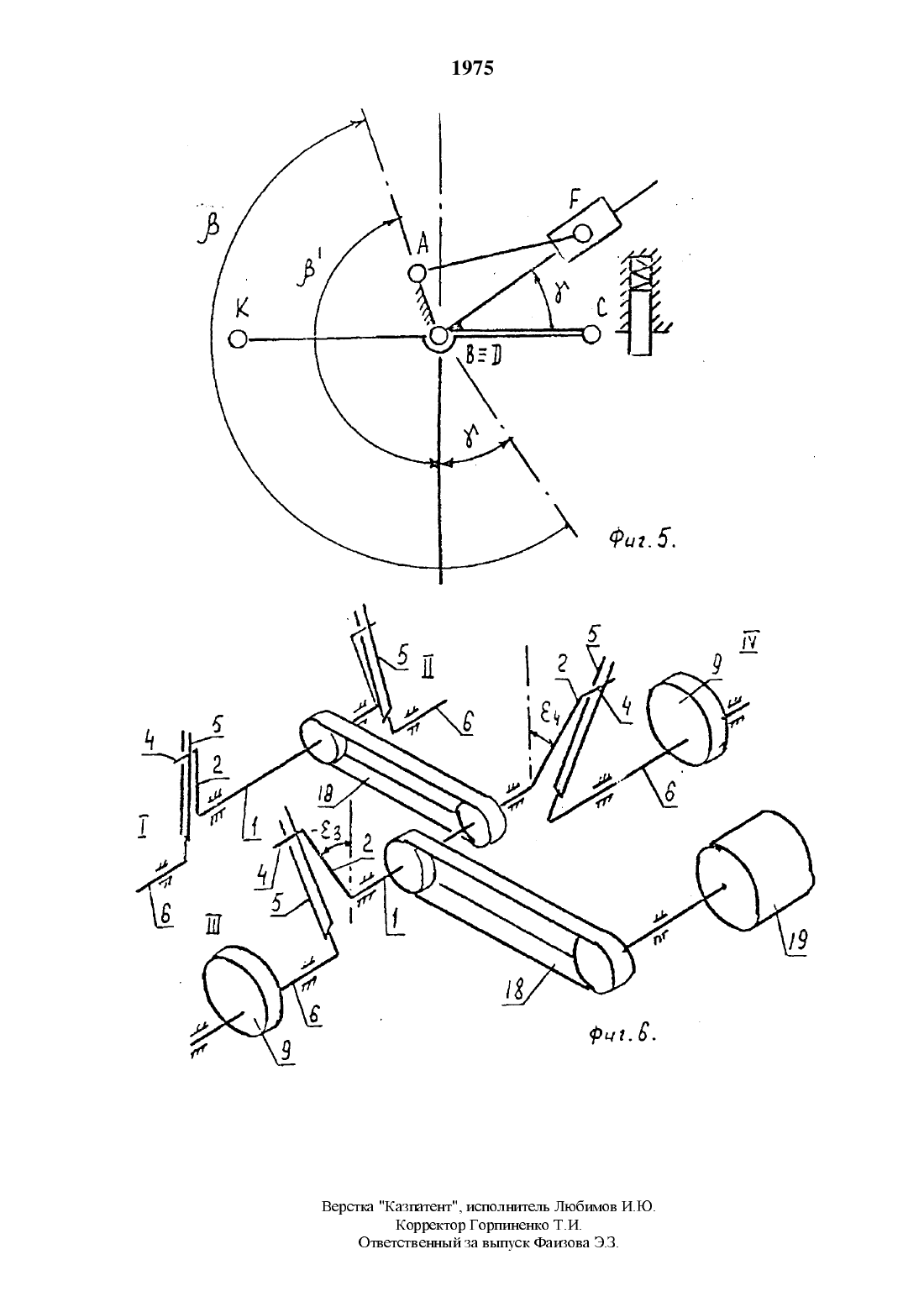
Изобретение относится к машиностроению и МОЖСТ бЫТЬ ИСПОЛЬЗОВЗНО В ЦИКЛОВЫХ ЗВТОМЗТИческих устройствах в качестве программоносителя, например, в сборочных автоматах.Известен программоноситель автомата в виде упоров, жестко устанавливаемых на линейке или диске (Волчкевич Л.И., Кузнецов М.М. и др. Автоматы и автоматические линии, ч. 2, М. Высшая школа, 1976, с. 70). Недостатком такого устройства является то, что оно только дает команду на включение привода исполнительного органа, а само на его движение не влияет. Каждому исполнительному органу требуется свой приВОД. ЗЗКОН ДВШКСШШ ИСПОЛНИТСЛЬНОГО органа зависит от характеристики этого привода.Известен также программоноситель автомата, содержащий приводной вал, кинематически связанный с ведомым валом, Кулачок, закрепленный на ведомом валу, толкатель, установленный перпендикулярно ведомому валу с возможностью осевого перемещения в неподвижной направляющей и взаимодействия с Кулачком и связанНЫЙ С ИСПОЛНИТСЛЬНЫМ ОрГЗНОМ ПОСрСДСТВОМ шарикового передаточного механизма (Волчкевич Л.И., Кузнецов М.М., Усов Б.А. Автоматы и автоматические линии, часть 2, М. Высшая школа,1976, с. 167). Недостатком такого программоносителя является невозможность быстрой оперативной переналадки, быстрый износ кулачков.Цель изобретения - повышение производительности за счет сокращения времени на перенаЛЗДКУ И ПОВЫШСНИС НЗДСЯШОСТИ.Указанная цель достигается тем, что в предлагаемом программоносителе для автомата, содержащем приводной вал, кинематически связанный с ведомым валом, Кулачок, закрепленный на ведомом валу, толкатель, установленный перпендикулярно ведомому валу с возможностью осевого перемещения в неподвижной направляющей и взаимодействия с Кулачком и связанный с исполнительным органом посредством шарикового передаточного механизма, согласно изобретению,ОН снабжен ДИСКОМ-ШЗТУНОМ И ПОДПРУЯСИНСННЫМ УПОрОМ, УСТЗНОВЛСННЫМ на ДОПОЛНИТСЛЬНО ВВСденном кронштейне перпендикулярно оси ведомого вала, при этом кулачок вьшолнен в виде эксцентрика, а ДИСК-ШЗТУН ВЫПОЛНСН В ВИДС круга с цилиндрическим отверстием, в котором размещен эксцентрик, и снабжен упором, закрепленным перпендикулярно на торце круга с возможностью взаимодействия с подпруЖиненным упором, причем центр цилиндрического отверстия смещен относительно центра диска-шатуна на величину эксцентриситета эксцентрика, а толкатель установлен с возможностью взаимодействия с цилиндрической поверхностью диска-шатуна,при этом кинематическая связь приводного вала с ВСДОМЫМ ВЫПОЛНСНЗ В ВИДС КуЛИСЫ, УСТЗНОВЛСНной на конце ведомого вала с возможностью вращения и фиксации относительно последнего и кривошипа, аналогично установленного на конце приводного вала с возможностью взаимодействияс кулисой, причем оси вращения приводного вала и ведомого смещены относительно друг друга.Сопоставительный анализ с прототипом показывает, что предлагаемый программоноситель автомата отличается тем, что кулачок выполнен в виде эксцентрика, имеется диск-шатун с внутренним отверстием, толкатель контактирует с диском-шатуном, имеется подпруЖиненный упор,контактирующий с упором на диске-шатуне, на конце вала имеется кулиса, на приводном валу имеется кривошип, взаимодействующий с кулисой, оси вращения приводного и ведомого валов смещены относительно друг друга.Сравнение предлагаемого изобретения с прототипом позволяет установить соответствие его критерию новизна. При изучении других технических решений в данной области техники признаки, отличающие заявляемое изобретение от прототипа, не бЫЛИ ВЬШВЛСНЫ И ПОТОМУ ОНИ обеспечивают заявляемому техническому решению соответствие критерию уровень изобретения.На фиг. 1 показана схема программоносителя в аксонометрии на фиг. 2 - схема его работы на фиг. 3 - график функций р 3 Г(3) на фиг. 4 график функции КР(3) на фиг. 5 - схема программоносителя с поворотом кулисы на фиг. 6 схема всей системы программоносителя.Программоноситель автомата состоит из следующих частей приводного вала 1 (фиг. 1) с кривошипом 2, который имеет возможность вращаться вокруг приводного вала 1 с последующей фиксацией винтом 3. На конце кривошрша 2 установлен штифт-ролик 4, взаимодействующий с кулисой 5, на которой имеется паз. Положение штифта-ролика 4 на кривошипе 2 может меняться с последующей фиксацией. Кулиса 5 установлена на конце вала 6 и имеет возможность вращаться вокруг его оси с последующей фиксацией винтом 7. Оси приводного вала 1 и вала 6 не совпадают на величину (1. Вал 6 установлен на подшипниковых опорах 8. Между опорами 8 на вал 6 жестко установлен эксцентрик 9. Эксцентриситет эксцентрика 9 равен 11. На эксцентрик 9 надет дискшатун 10, выполненный в виде круга. В нем ИМСется цилиндрическое отверстие, центр которого смещен относительно геометрического центра диска-шатуна 10 на величину 11.Эксцентрик 9 имеет возможность свободного проворота в отверстии диска-шатуна 10. На боковой поверхности диска-шатуна 10 имеется упор 11. Диск-шатун 10 охватывается цилиндрической поверхностью верхней части толкателя 12,нижняя часть которого установлена в неподвижной направляющей 13. Между верхней частью толкателя 12 и направляющей 13 на толкатель 12 надета пружина 14. В направляющей 13 на кронштейне установлен свободно двигающийся вдоль своей оси упор 15, поджатый пружиной 16. Упор 15 контактирует с упором 11 при совпадении геометрического центра диска-шатуна 10 с осью вала 6, а эксцентриситет эксцентрика 9 находится В ПСрПСНДИКуЛЯрНОМ ПОЛОЖСНИИ ОТНОСИТСЛЬНОоси толкателя 12. К направляющей 13 присоединен шариковый передаточный механизм 17, взаимодействующий с толкателем 12.Программоноситель работает следующим образом. Приводной вал 1 (фиг. 1) вращается от привода, на чертеже не показанного, и совершает один оборот за цикл с равномерной скоростью. Через кулисную кинематическую пару штифтролик 4 - кулиса 5, получает вращение вал 6, который также делает один оборот за цикл, но с переменной скоростью. Вместе с валом 6 вращается эксценртрик 9. В начальном положении его герметический центр точка С находится на одной горизонтали с точкой В, определяющей положение оси вала 6 (фиг. 2-1). Геометрический центр диска-шатуна 10 точка В совпадает с точкой В. При повороте вала 6 на 180 от первоначального положения эксцентрик 9 и диск-шатун 10 вращаются совместно, точка В совпадает с точкой В(фиг. 2-1, 2). Толкатель 12 неподвижен. На фиг. 1 показан момент, когда вал 6 повернут на угол 90 от первоначального положения. После того как вал 6 повернется на 180, упор 11 вступает в контакт с упором 15 и вдавливает его в кронштейн направляющей 13, сжимая пружину 16. Возникает сила сжатой пружины 16-Р (фиг. 2-2), которая давит на упор 11, а через него на диск-шатун 10. Диск-шатун 10 меняет направление своего враЩСНИЯ И ВЫВОДИТСЯ ИЗ МСрТВОГО ПОЛОЖСНИЯ, В КОтором он находился. Центр В диск-шатуна 10 начинает двигаться вдоль оси толкателя 12 (фиг. 2-3) совместно с ним. При повороте вала 6 на 90 толкатель 12 движется вниз на величину 2 11, при повороте вала 6 на последующие 90 толкатель 12 возвращается в исходную позицию (фиг. 2-4,5) под действием пружины 14.Наладка программоносителя осуществляется следующим образом. На фиг. 2.-1,4 показано, что значение углов щ и а вращения кривошт/Ша 2,соответствующих прямому и обратному ходу толкателя 12, зависит от угла В, определяющего положение стойки механизма АВ относительно перпендикуляра к положению кулисы ВР при перпендикулярности эксцентриситета СВ относительно оси толкателя 12. Эта зависимость определяется следующими выражениямигде д - длина стойки АВ г - длина кривошина АР (рэ - угол вращения кривошипа АР, соот 1975ветствующий движению толкателя К - коэффиЦИСНТ неравномерности хода.На фиг. 3 показан график функции (рэ (3),1-г 32-г 23-г 1,3 при 1 1.На фиг. 4 показан график функции К Р (В),1-г 32-г 23-г 1,3 при 11.На фиг. 2 показана схема, в которой положение кулисы ВР и эксцентриситета ВС совмещены. На фиг. 5 показана схема, где положение кулисы ВР относительно эксцентриситета ВС может меняться и определяется углом у. В этой схеме угол В между положением стойки АВ и осью толкателя постоянен, а угол может меняться посредством изменения угла уУгол у имеет знак , если кулиса ВР поворачивается против часовой стрелки относительно ВС и (-), если поворот идет по часовой стрелке.На одном валу 6 может находиться только один эксцентрик 9, поэтому весь командоаппарат должен представлять из себя систему валов 6,соединенных кинематическими связями 18 (фиг. 6), получающих движение от общего привода 19. Изменяя положение кривошипов 2 относительно друг друга на углы е, определяющие фазы срабатывания каждого толкателя 12, и изменяя значения углов В, возможно получить полную циклограмму работы всего командоаппарата по заданной программе.Предлагаемый программоноситель автомата позволяет посредством изменения значений параметров В, е, г (при а сопзг), получить различные значения коэффициента неравномерности хода К, угла (рэ, соответствующего углу поворота кривошипа при движении толкателя, обеспечивает точность фаз срабатывания толкателей.Использование такого программоносителя в автоматах, например, сборочного производства,не требующих точной отработки передаточного закона движения, например, равномерного движения, обеспечит высокую оперативность переНЗЛЗДКИ, ЧТО В КОНСЧНОМ ИТОГС ПОВЫСИТ ПРОИЗВОдительность технологического процесса. Программоноситель МОЖСТ НЗЙТИ ПрИМСНСНИС ТЗКЖС В КОНСТрУКЦИЯХ ЗВТОМЗТОВ-ЗТРЗКЦИОНОВ И ЗБТОМЗтах-шрушках, где разнообразие и быстрота полуЧЗСМЫХ ЗЗКОНОВ ДВИЪКСНИЯ ИМССТ ПСРВОСТСПСННОС значение.Программоноситель автомата, содержащий приводной вал, кинематически связанный с ведомым валом, кулачок, закрепленный на ведомом валу, толкатель, установленный перпендикулярно ведомому валу с возможностью осевого перемещения в неподвижной направляющей и взаимодействия с кулачком и связанный с исполнительным органом посредством шарикового передаточного механизма, опшичающийся тем, что с целью повышения производительности за счетсокращения времени на переналадку И повЬ 1 Шения надежности, он снабжен диском-шатуном и подпруЖиненнЫМ упором, установленным на дополнительно введенном кронштейне перпендикулярно оси ведомого вала, при этом кулачок выПОЛНСН В ВИДС эксцентрика, а ДИСК-ШЗТУН ВЫПОЛнен в виде круга с цилиндрическим отверстием, в котором размещен эксцентрик, и снабжен упором,закрепленным перпендикулярно на торце крута с возможностью взаимодействия с подпружиненнЫм упором, причем Центр цилиндрического отверстия смещен относительно Центра диска 1975шатуна на величину эксцентриситета эксцентрика, а толкатель установлен с возможностью взаимодействия с цилиндрической поверхностью диска-шатуна, при этом кинематическая связь приводного вала с ведомым выполнена в виде Кулисы, установленной на конце ведомого вала с возмоЖностью вращения и фиксации относительно последнего и кривошипа, аналогично установленного на конце приводного вала с возможностью взаимодействия с кулисой, причем оси вращения приводного и ведомого валов смеЩенЫ относительно друг друга.
МПК / Метки
МПК: B23P 21/00, G05G 21/00
Метки: программоноситель, автомата
Код ссылки
<a href="https://kz.patents.su/8-1975-programmonositel-avtomata.html" rel="bookmark" title="База патентов Казахстана">Программоноситель автомата</a>
Устройство ударного действия
Номер предварительного патента: 1699
Опубликовано: 15.03.1995
Автор: Дусалиев Каиргали Мукашевич
МПК: B25D 13/00, E21C 3/06, E21C 3/00...
Метки: устройство, действия, ударного
Формула / Реферат:
Изобретение относится к области строительства, машиностроения и горного дела и может использоваться в качестве ударных машин и инструментов для бурения, клепки, штамповки, обрубки и т.п. Для предотвращения передачи встречных ударов от поршня толкателю, уменьшения инерционной нагрузки на профилированный диск и вал привода, устранение передачи на вал возможных вибраций от толкателя,устройство ударного действия, включающее привод и ударный...
Устройство для контроля шатунов
Номер патента: 1001
Опубликовано: 15.06.1994
Авторы: Шилов Геннадий Тимофеевич, Шумейко Сергей Григорьевич, Беспалов Юрий Алексеевич, Сагитаев Ернур Копанович, Синельников Борис Иосифович, Суранчиев Мурат Турганович
МПК: G01B 5/24
Метки: контроля, шатунов, устройство
Формула / Реферат:
Изобретение относится к машиностроению и предназначено для контроля шатунов. Целью изобретения является повышение точности контроля и технологичности изготовления устройства. Это достигается тем. что в устройстве. содержащем основание, закрепленную на нем базирующую оправку, измерительный узел и три отсчетных элемента, выполняют измерительный узел в виде корпуса с двумя призмами, предназначенными для установки на палец поршневой головки...
Устройство для хранения инструмента
Номер патента: 868
Опубликовано: 15.06.1994
Автор: Букреев Юрий Николаевич
МПК: B25H 3/00
Метки: хранения, устройство, инструмента
Формула / Реферат:
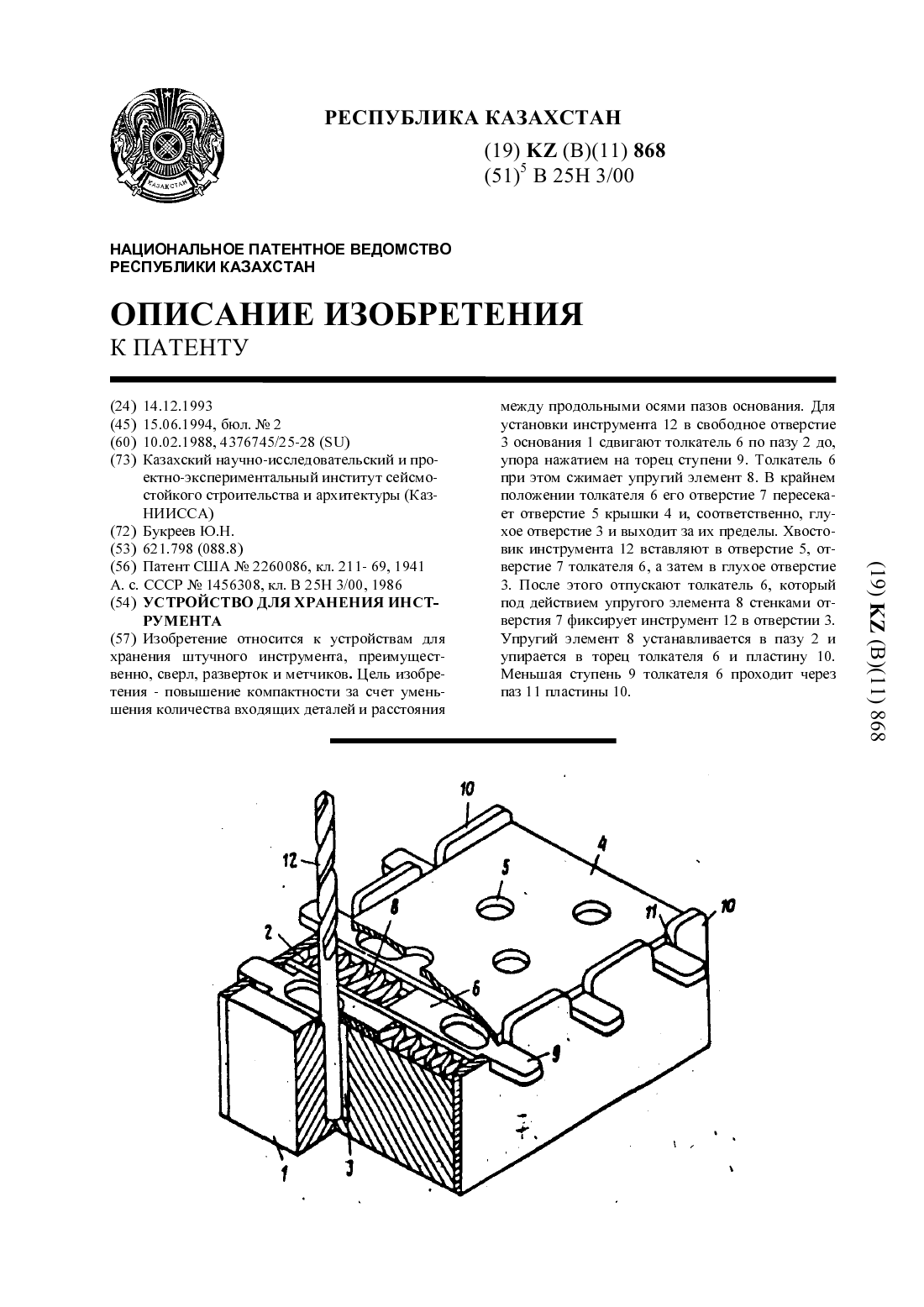
Изобретение относится к устройствам для хранения штучного инструмента, преимущественно, сверл, разверток и метчиков. Цель изобретения - повышение компактности за счет уменьшения количества входящих деталей и расстояния между продольными осями пазов основания. Для установки инструмента 12 в свободное отверстие 3 основания 1 сдвигают толкатель 6 по пазу 2 до, упора нажатием на торец ступени 9. Толкатель 6 при этом сжимает упругий элемент 8. В...
Устройство для получения армированной пряжи
Номер предварительного патента: 1104
Опубликовано: 15.09.1994
Автор: Орлова Вера Александровна
МПК: D01H 1/28
Метки: армированной, устройство, пряжи, получения
Формула / Реферат:
Изобретение относится к устройствам для получения армированной пряжи из шерсти, пуха и других волокон, преимущественно, в домашних условиях. Устройство для получения армированной пряжи содержит средство для подачи сердечниковой нити в канал полого веретена, узел подачи волокнистой мычки к сердечниковой нити в виде выпускной пары валиков подачи, механизм намотки пряжи и привод, выполненный реверсивным и состоящий из электродвигателя и системы...
Диспергатор
Номер патента: 1154
Опубликовано: 15.09.1994
Авторы: Свирякин Борис Иванович, Олейников Анатолий Григорьевич, Алексеев Станислав Викторович, Стороженко Наталья Дмитриевна
МПК: B01F 7/00
Метки: диспергатор
Формула / Реферат:
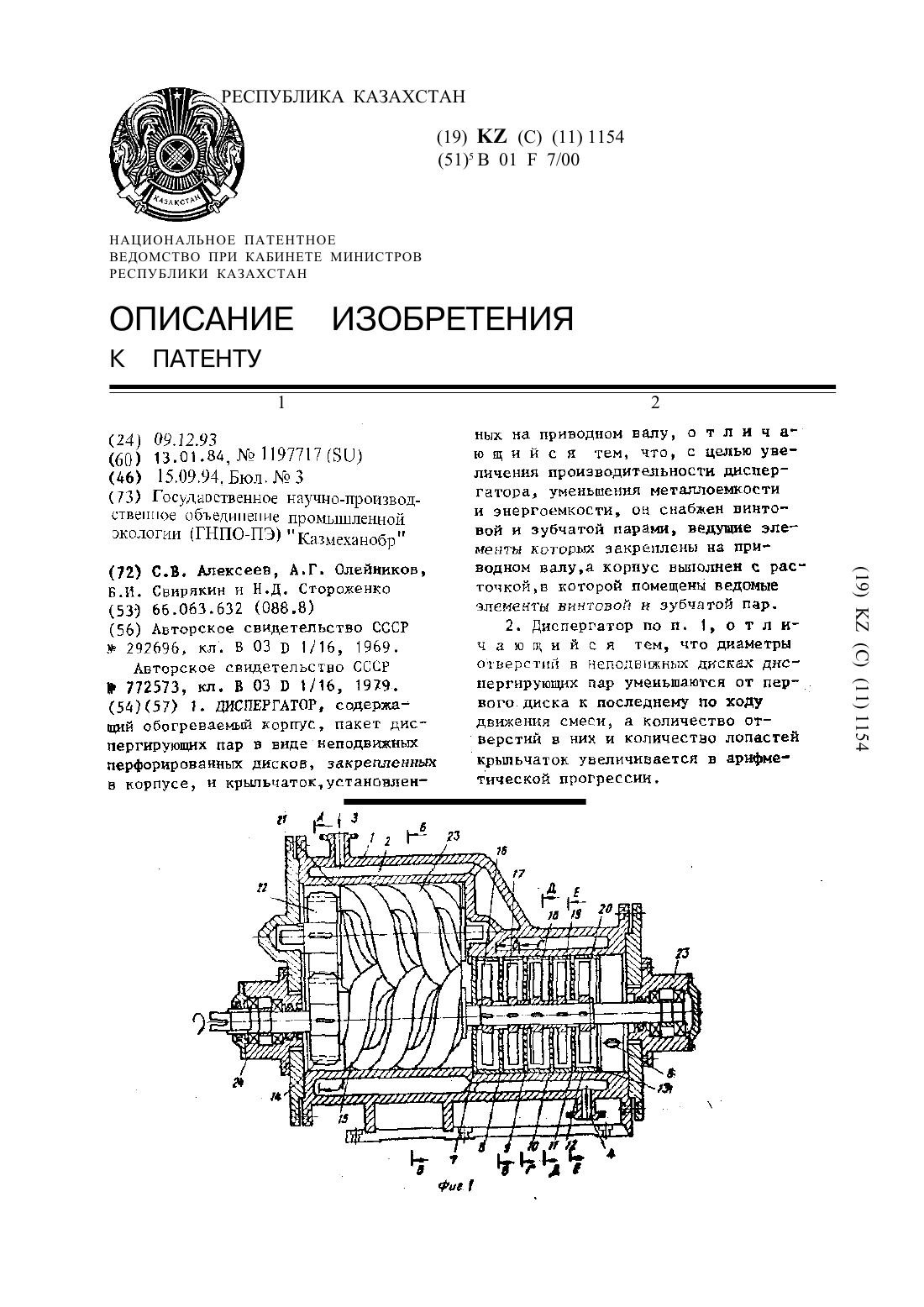
1. ДИСПЕРГАТОР, содержащий обогреваемый корпус, пакет диспергирующих пар в виде неподвижных перфорированных дисков, закрепленных в корпусе, и крыльчаток, установленных на приводном валу, отличающийся тем, что, с целью увеличения производительности диспергатора, уменьшения металлоемкости и энергоемкости, он снабжен винтовой и зубчатой парами, ведущие элементы которых закреплены на приводном валу, а корпус выполнен с расточкой, в которой помещены...
Предыдущий патент: Способ регулирования вязкости жидкости
Следующий патент: Ампульное устройство
Случайный патент: Способ для дистанционного отбора проб на запыленность и загазованность, содержащихся в продукте взрыва по проходке горных выработок