Устройство управления приводом загрузочного лотка шахтной печи
Формула / Реферат
УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДОМ ЗАГРУЗОЧНОГО ЛОТКА ШАХТНОЙ ПЕЧИ, расположенного в герметичной камере колошника печи ниже воронки шихтового канала с возможностью поворота вокруг ортогональных осей, первая из которых является осью подвески между двумя ветвями вилки, а вторая совпадает с продольной осью вилки, вокруг которой она может поворачиваться за одно целое с лотком, содержащее вибрационный командный орган, имеющий те же степени свободы, что и лоток, приводной механизм сообщения командному органу движения лотка, трансмиссионное устройство воспроизведения движения командного органа лотком, первый цилиндр поворота вилки и лотка вокруг первой оси, второй цилиндр их поворота вокруг второй оси, сервопривод координации движения командного органа и лотка с движениями приводных штоков цилиндров и управления ими при изменении положения органа и лотка, отличающееся тем, что, с целью повышения надежности работы, командный орган сервопривода снабжен блоком контроля поворотов его вокруг двух перпендикулярных осей и возбуждения двух серий управляющих инструктивных сигналов амплитуды этих поворотов, соединенным с блоком контроля рассогласования поворотов лотка вокруг осей и возбуждения двух серий управляющих действительных сигналов по амплитуде, блоком сравнения инструктивных и действительных сигналов и возбуждения по рассогласованию управляющих корректирующих сигналов, соединенным с приводными штоками цилиндров.
Текст
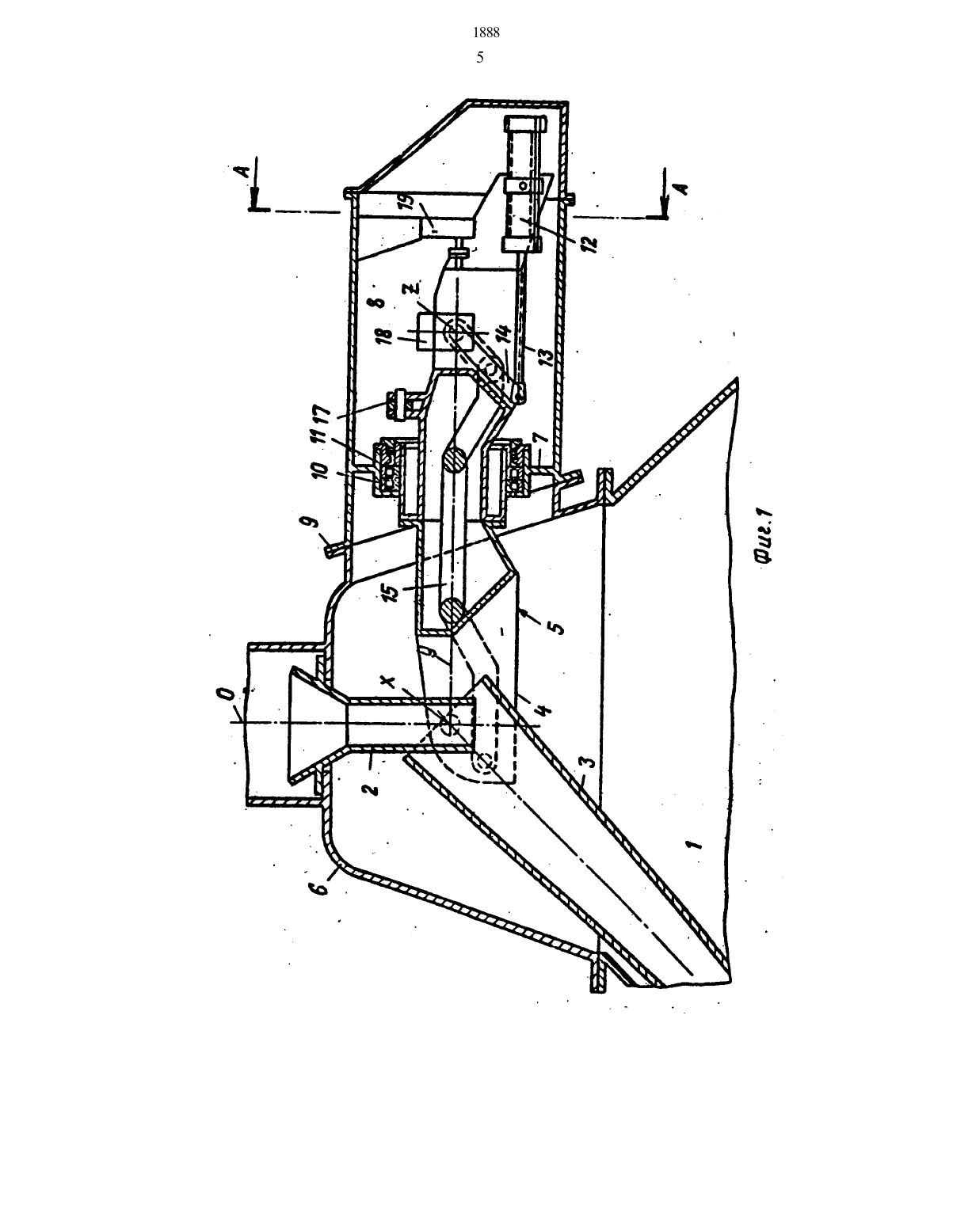
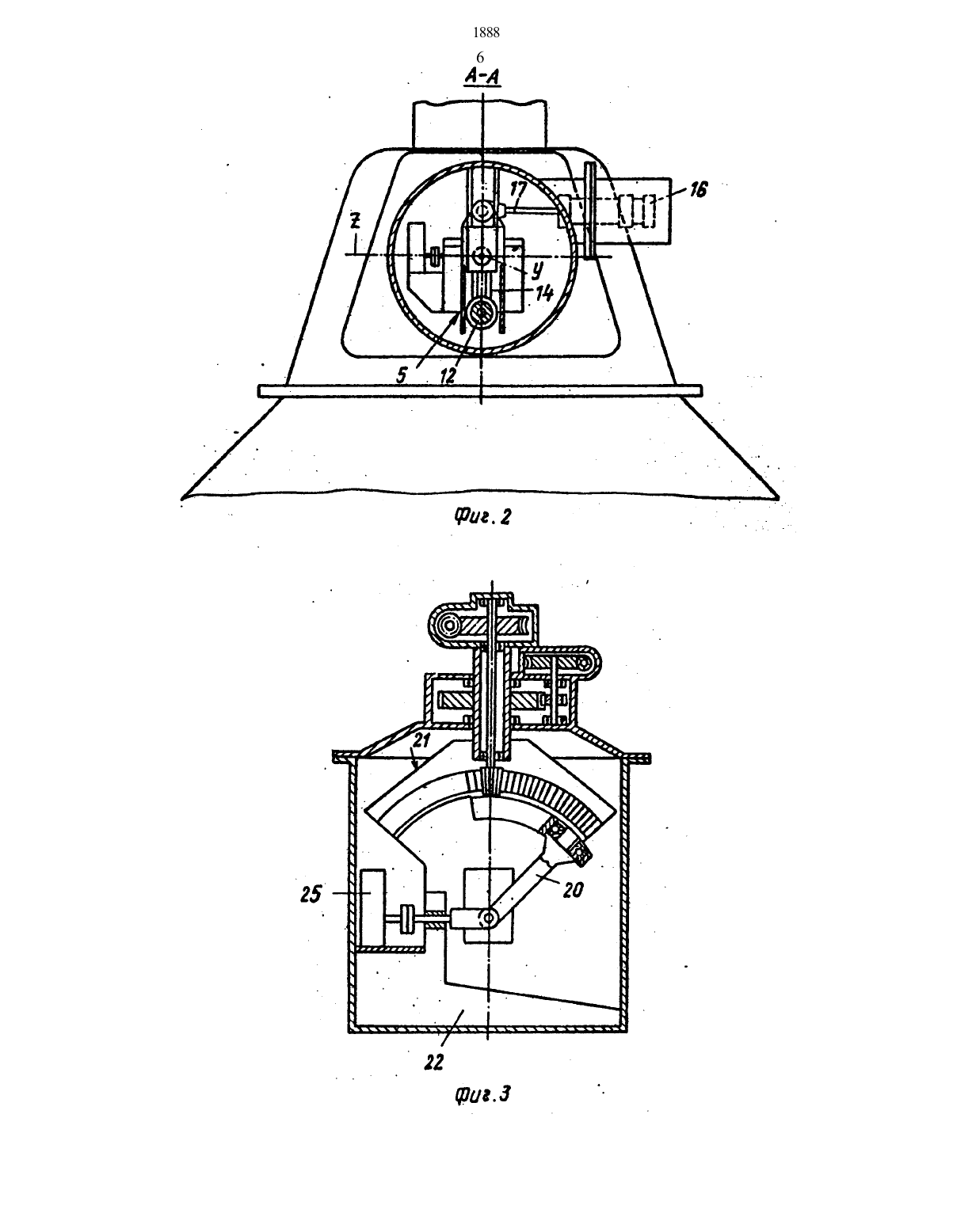
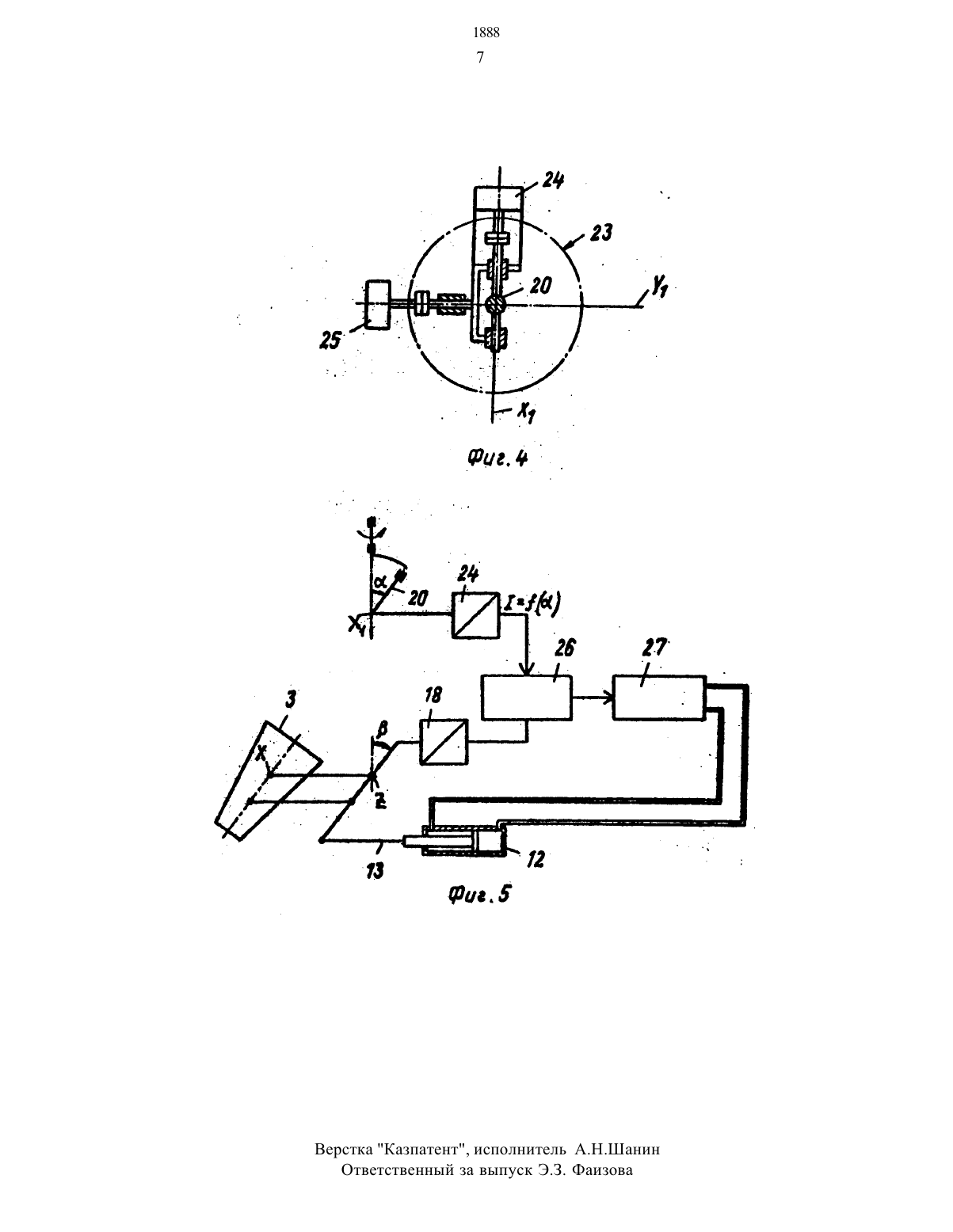
управления движением вибрационного лотка загрузочного устройства шахтнойпечи. А Наиболее близким к изобретению по технической сущности н достигаемому результату является устройство управления приводом загрузочного лотка шахтной печи, расположенного В герметичной камере колощника печи ниже воронки шихтового канала с возможностью поворота вокруг ортогональным осей, первая из которым являетсяосью подвески междУ двумя ветвяшт вилки, а вторая совпадает с продольной осью вилки, вокруг которой онаможет поворачиваться за одно целоес лотком, содержащее командный орган, имещцнй те же степени свободы,что н лоток, приводной механизм сообщения командному органу движения лотка, трансмиссионное устройство воспроизведения движения командного органа лотком. первый цилиндр поворота вилки н лотка вокруг первой оси,второй цилиндр их поворота вокруг второй осн, сервопривод координации движения командного органа и лотка с движениями приводных штоков цилиндров и управления ими при изменении положения органа и лотка В.Командный орган и его приводной механизм известного устройства должны иметь возможность сопротивляться значительтшч механическим возд 0 йСТВЙ ям, оказываемым массой лотка н вилки подвески. Вместе с этим необходима разработка более современной их конструкции для повышения надежности управления приводом лотка и егора боты.Для достижения поставленной цели в устройстве управления приводом загрузочного лотка шахтной печи, рас положенного в герметичной камере колошника печи ниже воронки шихтового канала с возможностью поворота вокруг ортогональиых осей, первая из которых является осью подвески между двумя ветвями вили, а вторая совпадает с продольной осью вилки, вокруг которой она монет поворачиваться-за одно целое с лотком содержащем вибг рационный командный орган, имеющий те же степени свободы. что и лоток,приводной механизм сообщения командному органу двиення лотка, транс ммсснонное устройство воспроизведения движения командного органа г лотком, первый цилиндр поворота вилки и лотка вокруг первоп.оси, второй хшлиидр их поворота вокруг второй. оси, сервопривод координации двинення командного органа н лотка-с движениями приводных штоков цилиндров иуправления ими при изменении положения органа и лотка, командный орган сервопрнода снабценбпохом контроля поворотов его вокруг двух перпендикулярных осей и возбуждения двух серий управляющих инструктивч вьт сигналов амплтуды этих повороТОВ, СОЕДННВПНЬЪ С ЛОКОМ КОНТРОЛЯ рассоглаеованя поворотов лотка вокруг осей и возбуждения двух серий УПРЗВЛЯЮЩНХ действительных СНГНЗЛОВ по амлитуде, блоком сравнения инструктивных и действительных сигналов и возбуждения по рассогласованию управляюцнх корректирующих снгналов,.соединеннын с приводными атаками цилиндров. На фиг. 1 схематично показан верч тнкальный разрез по днанетральной плоскости головки шахтной печи с загрузочным устройством нафиг. 2 . разрез АгА на фиг. 1 на фиг. 3 схематично показан приводной механизм командного органа и устройство для возбуждения инструктивных снгнат лов на фнгь 4 схема принципвдей ствия устройства на фиг. 3, вид в плане на фиг. 5 - схема вариантаисполнения системы сервоприводасог цУстройствосодерхнт колошник доменнойпечи под давленем в которую должна быть засыпана шмхтвНЗ . верхнего шлюза (не изображен) через вертикальный питающий канал 2.расположенный по вертикальной осн О печи. Распределение загружаемой шхтн через канал 2 осуществляется с поицью вибрационного лотка 3, нмекг него преимущественно форму усечеп- А ного конуса. Этот лоток подвешен . между двумя ветвями (из которым одна ветвь 4 является видимой) вилки 5,которая установлена вбоковой стенке корпуса 6 колошника 1 печи так, чтчбы меть возможность поворачиваться вокруг своей продольной оси Т Независимо от этой возможности поворота вилки 5 вокруг оси вибрацноввщлоток 3 может поворачиваться вокруг своей оси подвески Х мету двумя ветвяи вилки 5.Вилка 5 установлена герметичны образом в стенке 7, отделяющей картер 8 управления и привода ОТ внутренней полости колошниа 1 печи,причем этот картер 8 установлен разъемным образом на фланце 9 корпуса 6Чтобы иметь возможность повора чиваться вокруг продольной осн. ,вила 5 размещена в шарикоподшипни ке 10, предусмотренном в разделитель ной стенке 7. Этот шарикоподшипник может быть объединен с уплотнительным устройством 11 для избежания давления в картер 8. Однако уплотнительное устройство 11 может быть устранено, если-в картере 8 предусмотрено давление. прнблнзительноравг ное давлению во внутренней полости паломника 1 печи.В известном устройстве управление осуществляет командную функцию и движущую функцию в той нтепенн, в какой этот командный орган приводит в действие посредством комплекта рычагов лоток Зг Командный орган н его связь с приводнъм механизмом могут подвергать этот орган снльнъм механическим воздействиям. чтобы избежать этих воздействий необходимо изъять у командного органа движущие функции таким образом, чтобы он выполнял нсключительно командную функцию. для этого используют получающий помощь приводной механизм, в котором мощность, необходимая для поворота вилки 5 н лотка желоба. получается при помощи гидроцилиндров, вместо того, чтобы отбирать эту мощность от приводным механизмов командного органа. На фиг. 1 изображен первый гидроцнлиндр 12 шток поршня 13 которого воздействует на рычаг 1 д на котором шарннрно закреплено трансмиссионное устройство 15. так,чтобы действие силового цилиндра 12 вызывало поворот рычага 14 вокругвокруг его оси подвески Х. Принимая во внимание, что конец штока поршня 13. который шарнирно закреплен на рычаге 14, должен осуществлять маятииковое движение вокруг осн 2 силовой цилиндр 12 должен иметь возмоаг ность поворота вокруг осн, параллель ной оспа . для этой цезия-силовойцилиндр 12 установлен при посредничестве цапф на заднем конце вилки 5.Второй гидроцилиндр 16 действует перпендикулярно первому силовому ч цилиндру 12. Силовой цилиндр 16 установлен цапфам (не видными) на стенке камеры 8 и его шток 17 шарнирно закреплен на вилке, чтобы поворачивать последнюю, благодаря шарикоподшипнику 10. вокруг осн У.Угловое положение лотка 3 постоянно контролнруется при помощи двух датчиков 18 н 19. Датчик 18 определяет действителное угловое положение желоба относительно осн О и передает сигналы. пропорциональные амплитуде поворота рычага 14 вокруг осък 2 ,т.е. повороты лотка 3 вокруг оснХ .датчик 19 также определяет движения вокруг оснУ и возбуждает и певедает сигналы. пропорциональные амплитуде арацеиия вилки 5 н лотка 3 вокруг оси Х .Командный орган 2 О (фиг. 3 и 4) может быть установлен на соответствуюцее место, например в машинное отделение, и приводится в действие соответствующим приводным механизмом 21.На ФИР- 4 командный орган 20 установлен на соответствующей ране 22 с помощью универсального шарнира в прогнвоположность карданному парннру 23. Шарнир 23 позволяет командному органу 20 поворачиваться вокруг двух Осей Х.-1. , перпендикулярным одна другой и соответствующих осям Х и У вращения лотка 3. .движение командного органа 20,например коническое прецессионное движение, дает указания для движення желоба в форме инструктивным сигналов, представляющего собой соответственно угловые движения командного органа 20 вокруг оси Х. и вокруг оси У в карданном шарнире 23. Угловые двниеиия органа 20 определяются двумя датчиками 24 н 25, кото рые соответствуют датчикам 18 и 19н контролируют соответственно повороты вокруг осей х.и йд . На фигд.5 показана скема иллюстрирующая связь между Мстройством наустройством на фиг. 1, которое должно их выполнять. Командная цепь на фиг. 5 обведннена с силовым цилиаром 12 для поворота вокруг оси Х .Аналогичная цепь предусмотрена для приедения в действие силового цилиндра 16 для осуществления поворо та вокруг осн .Предположим, что комондны орган 20 повернутвокруг оси вращения Х. на угол, равный . Это ииструктивная величина для желоба, т.е. последний должен занять наклонное положение ы. относительно вертикальной оси О . Поворот командного органа 20 вокруг оси Х, отмечается датчиком 26, который возбуждает электрический сигнал - Е (м), функция амплитуды и направления поворота. Предположим, чтов момент, когда командный орган занимает требуемое положение, лоток 3 будет наклонен на угол В относи гтельно оси О . Это положение замеря ется датчиком 18. который определяет положения н вращения вокруг оси 2. Этот датчик производит, следовательно, съягнал 1 - Е (р), который представляет действительное положение желоба. Сигналы датчиков 18 и 24. посылаются в регулятор, который срав нивает сигналы, выдаваемые обоими датчиками 18 и 24, и возбуждает корректирующие сигналы в зависимости от этого сравнения.Если случайно угол а. равен углуд ,сигналы 1 - Е (Ы) и Е (Н) равны и регулятором 26 не возбуждается никакой сигнал. Напротив, если Д отличается от М ко 99 еКТНРУЮЩИЙ СИГН 8 дэ возбуждаемый регулятором 26, приклаДЫВЗВТСЯ К ЗОЛОТННКОВОМУ сервогндроприводу 27, который определяет направление циркуляции гидравлическогорабочего тела силового цилиндра 2 и зависимости от знака корректирующих сигналов. Поршень силового цилиндра 2 перемещается, следовательно, в одну или другую сторону в зависимости от того, являются ли К 09 РектиРУЮщив сигналы пблоиителвными или отрицателъньни. Эта команда длится до тех пор. пока уголок, не станет равен углу р и корректируюцие сигналы не станут иулевьншСервогидропривод 27 определяет также расход гидравлического рабочего тела в зависимости от амплитуды корректирующих сигналов.Когда командный орган 20 приводит сяв круговое коиическое прецессионное движение, на уровне карданного шарнира 23 производятся постоянные повороты вокруг двух осей Х, и Х. Эти повороты приводят в действие (по стояние) гидравлические цели, объединенные с двумя силовыми цилиндрами 12 и 16, чтобы те же повороты осуществлялись вокруг осей Х нУ.Учитывая, что в варианте исполнения, показанном на фиг. 1-4, комаидиый орган отделен от системы подвески желоба. нет необходимости предусматривать предохранительные средства для предупрецения риска разрушения в случае повреждения в гидравлической цепи или в системе приода командного органа.Предлагаемое изобретение обеспечивает более надежиую работу устрой ства управления приводом эагрузочио лотка шахтной печи.
МПК / Метки
МПК: C21B 7/20
Метки: лотка, приводом, шахтной, управления, загрузочного, устройство, печи
Код ссылки
<a href="https://kz.patents.su/7-1888-ustrojjstvo-upravleniya-privodom-zagruzochnogo-lotka-shahtnojj-pechi.html" rel="bookmark" title="База патентов Казахстана">Устройство управления приводом загрузочного лотка шахтной печи</a>
Устройство подвески загрузочного лотка шахтной печи

Номер патента: 1599
Опубликовано: 15.12.1994
Авторы: Пьер Мэлье, Эдуард Лежилль
МПК: C21B 7/18
Метки: шахтной, устройство, подвески, лотка, загрузочного, печи
Формула / Реферат:
УСТРОЙСТВО ПОДВЕСКИ ЗАГРУЗОЧНОГО ЛОТКА ШАХТНОЙ ПЕЧИ, содержащее вертикальный питающий шихтовый бункер, установленный на колошнике печи и связанный с наружными загрузочными бункерами шихты транспортными механизмами, лоток с приводом качания, расположенный в герметичной камере и подвешенный на пружинах цапфы между симметричными ветвями полой охлаждаемой вилки, проходящей через боковую стенку кожуха печи в камеру, узлы подвода и отвода хладагента и...
Загрузочное устройство шахтной печи
Номер патента: 1887
Опубликовано: 15.03.1995
Авторы: Эдуард Лежилль, Пьер Мэлье
МПК: C21B 7/20
Метки: печи, устройство, загрузочное, шахтной
Формула / Реферат:
1. ЗАГРУЗОЧНОЕ УСТРОЙСТВО ШАХТНОЙ ПЕЧИ, содержащее приводной лоток, механизм органов управления качанием и вращением лотка с командным органом, вертикальный канал для подачи из пихтовых бункеров в печь материалов, причем лоток установлен между двумя ветвями вилки-подвески, имеющей неподвижную поддерживающую раму, а приводная силовыми гидроцилиндрами вилка-подвеска выполнена с возможностью совместного поворота с лотком, отличающееся тем, что, с...
Загрузочное устройство шахтной печи
Номер патента: 1601
Опубликовано: 15.12.1994
Авторы: Пьер Мэлье, Эдуард Лежилль
МПК: C21B 7/20
Метки: шахтной, устройство, загрузочное, печи
Формула / Реферат:
1. ЗАГРУЗОЧНОЕ УСТРОЙСТВО ШАХТНОЙ ПЕЧИ, содержащее приводной желоб с механизмами его качания, вертикальную воронку для подачи в печь шихтовых материалов, смонтированную на колошнике печи и сообщенную с наружным шихтовым бункером, при этом желоб с кронштейнами подвешен в герметичной камере печи между двумя ветвями приводной полой вилки, установленной в подшипнике, а несущий рычаг вилки расположен под прямым углом к оси подвески желоба,...
Устройство для загрузки шахтной печи
Номер патента: 1886
Опубликовано: 15.03.1995
Авторы: Рене Мар, Пьер Майе, Эдуард Лежиль
МПК: C21B 7/18
Метки: шахтной, загрузки, устройство, печи
Формула / Реферат:
I. Устройство для загрузки шахтной печи, содержащее один или несколько бункеров с газоуплотнительными клапанами, приемную воронку и приводной распределительный желоб с механизмами качания и вращения, отличающееся тем, что, с целью его упрощения , повышения надежности и расширения его функциональных возможностей, устройство снабжено кольцеобразным седлом для подвески распределительного желоба, механизм вращения которого выполнен в виде...
Загрузочное устройство шахтной печи
Номер патента: 1598
Опубликовано: 15.12.1994
Авторы: Пьер Малье, Этиль Лонарди, Эдуард Лежилль
МПК: C21B 7/18
Метки: печи, шахтной, загрузочное, устройство
Формула / Реферат:
1. ЗАГРУЗОЧНОЕ УСТРОЙСТВО ШАХТНОЙ ПЕЧИ, содержащее приемный бункер, распределитель шихты в виде лотка, соединенный с приводом вращения, размещенную под лотком бункерную камеру, разгрузочное отверстие которой расположено по оси печи, и регулирующие заслонки, расположенные между приемным бункером и бункерной камерой, отличающееся тем, что, с целью обеспечения возможности регулирования расхода вертикального потока шихты, запорно-дозирующнй орган...
Предыдущий патент: Загрузочное устройство шахтной печи
Следующий патент: Способ управления приводом движения лотка загрузочного устройства шахтной печи
Случайный патент: Способ получения продуктов быстрого приготовления на основе зернобобовых культур