Способ распознавания диагностических сигналов гидроагрегатов
Номер инновационного патента: 30842
Опубликовано: 25.12.2015
Авторы: Кобенко Вадим Юрьевич, Кликушин Юрий Николаевич, Кошеков Кайрат Темирбаевич

Формула / Реферат
Изобретение относится к области диагностики технического состояния машин и механизмов и может быть использовано для технического состояния в информационно- диагностических системах автоматической диагностики и мониторинга.
Целью предлагаемого изобретения является повышение точности и достоверности диагностики, которое достигается путем автоматической классификации вибросигналов, позволяющей построение линейной и древовидной классификации, связывающей имена файлов сигналов с диагностируемыми состояниями технических объектов.
Для определения состояния гидроагрегата используют абсолютные абсолютные и относительные идентификационные измерения.
Под абсолютными понимаются такие измерения входного сигнала, при которых эталон для сравнения формируется из самого сигнала, т.е. «привязывается» к сигналу. При относительных идентификационных измерениях используются эталоны, независящие от входного сигнала. Структурная схема исследования состоит из считывателя (СС), идентификационного анализатора сигналов (ИАС), компаратора (К), базы данных эталонных сигналов (БДЭС), табличного и иерархического классификатора (ТК и ИК),интерпретатора. С помощью считывателя сигналов происходит чтение с диска реализация вибросигналов, принадлежащих четырем объектам. Путем идентификации сигналов объекты диагностики делятся на четыре класса. Идентификация осуществляется путем присвоения функциям сигналов имен эталонов внутренней базы данных по принципу минимума отклонения между значениями идентифицированных параметров сигнала и эталона В базе данных хранится 17 эталонов.
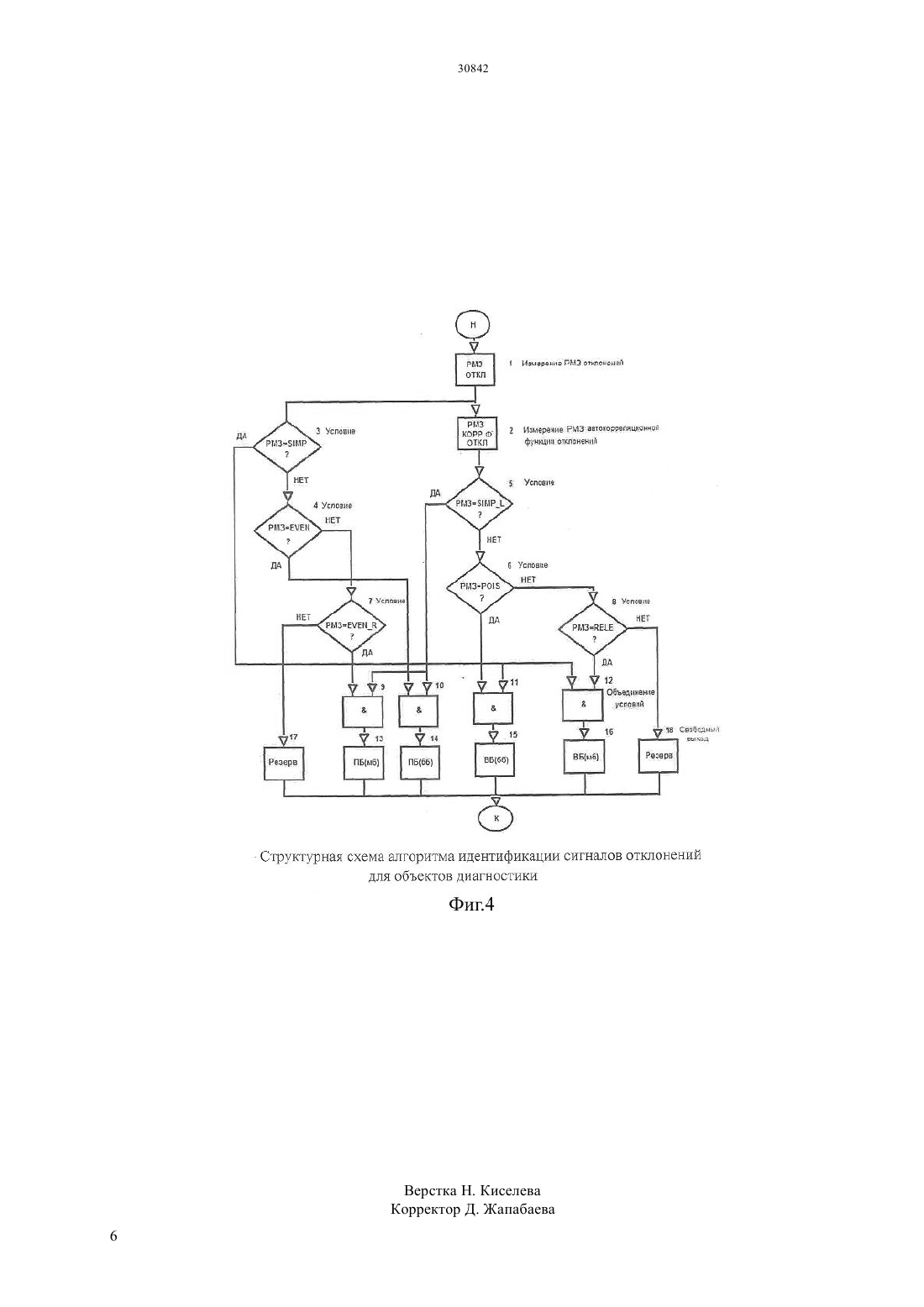
На основе идентификационной таблицы сформирован алгоритм автоматической классификации объектов диагностики. В структуре алгоритма учтено то обстоятельство, что каждый объект характеризуется набором из двух логически связанных лингвистических термов.
Текст
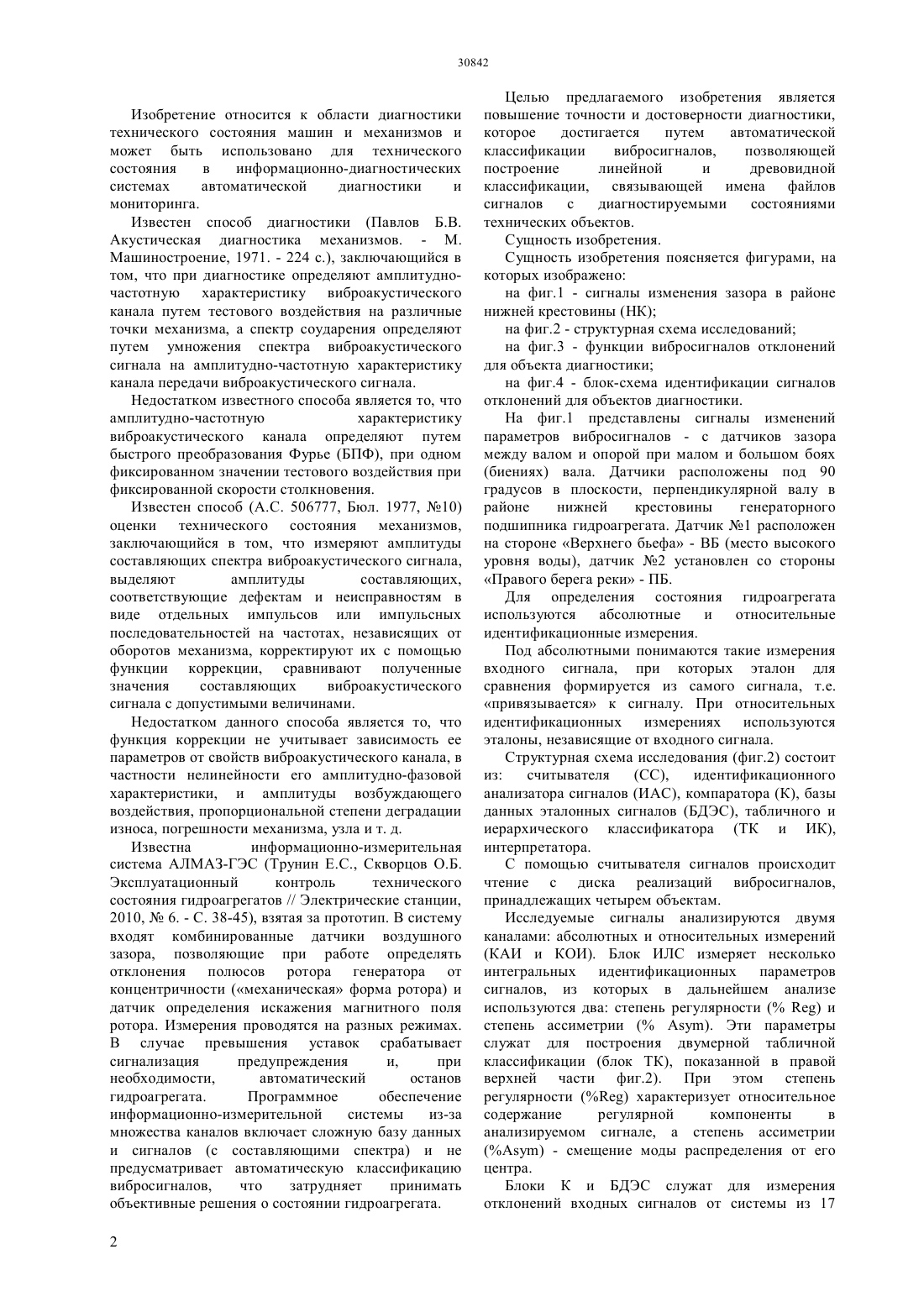
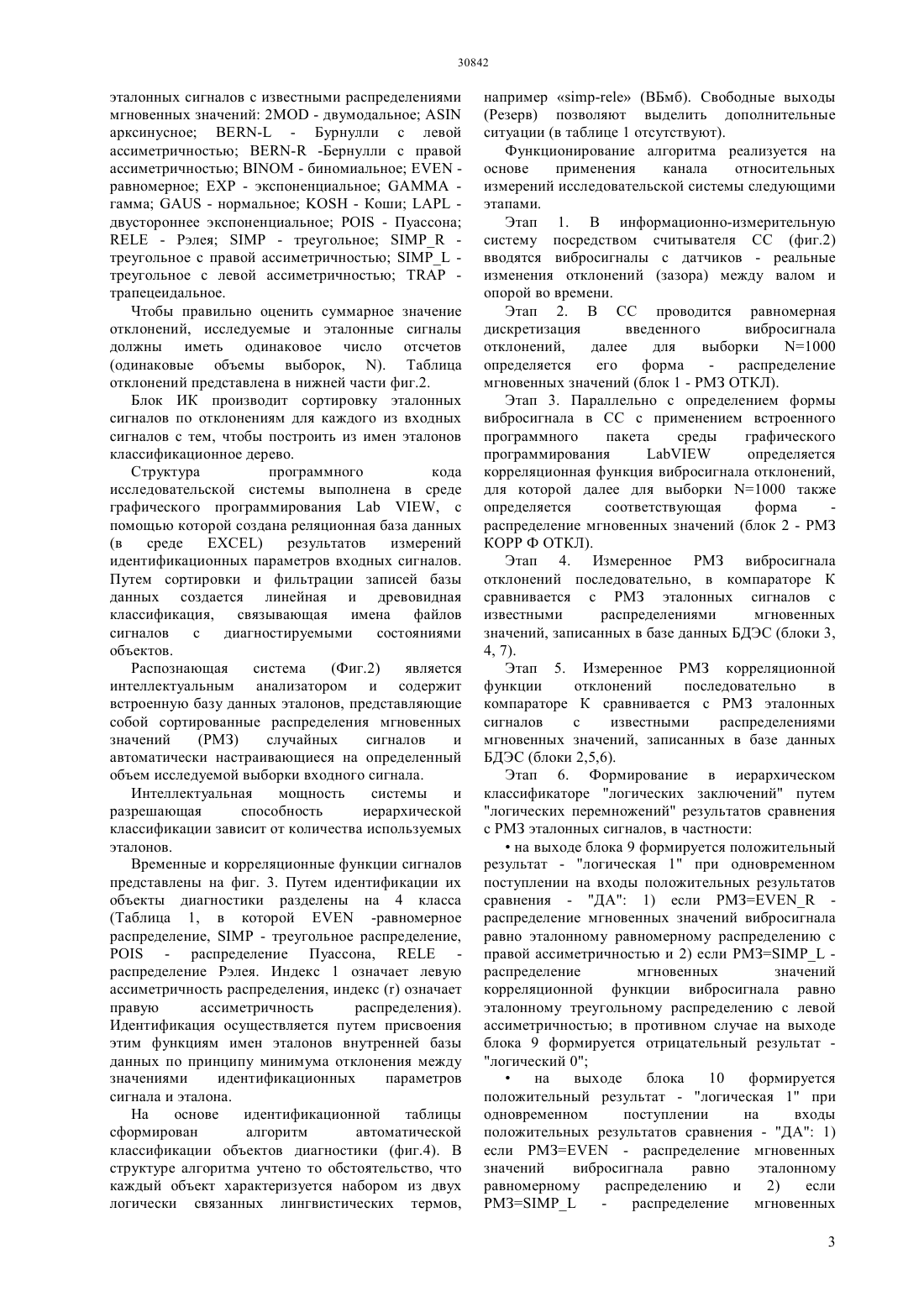
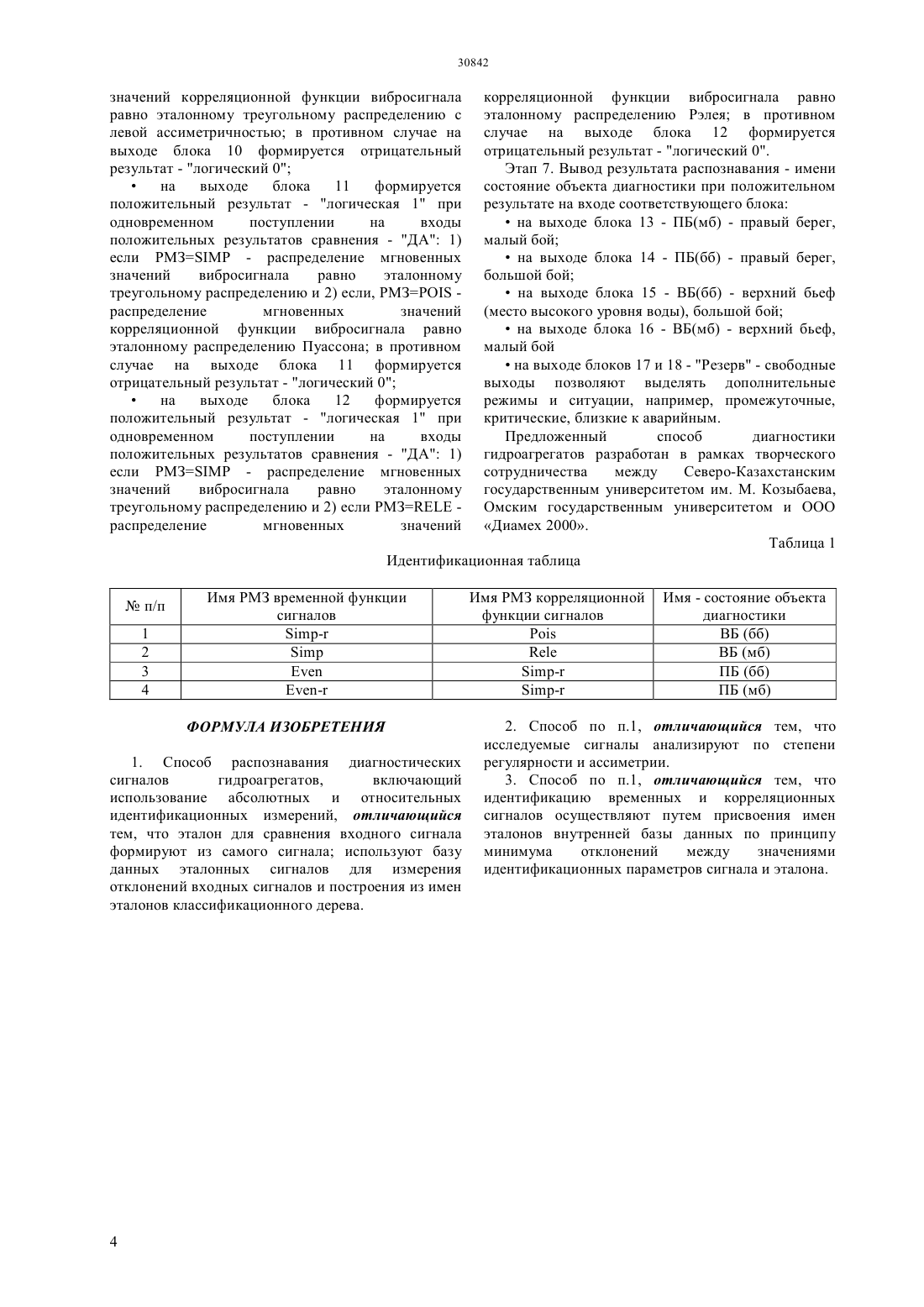
(51) 01 15/00 (2006.01) 01 7/02 (2006.01) МИНИСТЕРСТВО ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ИННОВАЦИОННОМУ ПАТЕНТУ Под абсолютными понимаются такие измерения входного сигнала, при которых эталон для сравнения формируется из самого сигнала, т.е. привязывается к сигналу. При относительных идентификационных измерениях используются эталоны, независящие от входного сигнала. Структурная схема исследования состоит из считывателя(СС),идентификационного анализатора сигналов (ИАС), компаратора (К), базы данных эталонных сигналов (БДЭС), табличного и иерархического классификатора (ТК и ИК),интерпретатора. С помощью считывателя сигналов происходит чтение с диска реализация вибросигналов, принадлежащих четырем объектам. Путем идентификации сигналов объекты диагностики делятся на четыре класса. Идентификация осуществляется путем присвоения функциям сигналов имен эталонов внутренней базы данных по принципу минимума отклонения между значениями идентифицированных параметров сигнала и эталона. В базе данных хранится 17 эталонов. На основе идентификационной таблицы сформирован алгоритм автоматической классификации объектов диагностики. В структуре алгоритма учтено то обстоятельство, что каждый объект характеризуется набором из двух логически связанных лингвистических термов.(72) Кошеков Кайрат ТемирбаевичКликушин Юрий НиколаевичКобенко Вадим Юрьевич(56) Трунин Е.С., Скворцов О.Б. Эксплуатационный контроль технического состояния гидроагрегатов // Электрические станции, 2010,6, с. 38-45(54) СПОСОБ РАСПОЗНАВАНИЯ ДИАГНОСТИЧЕСКИХ СИГНАЛОВ ГИДРОАГРЕГАТОВ(57) Изобретение относится к области диагностики технического состояния машин и механизмов и может быть использовано для технического состояния в информационно-диагностических системах автоматической диагностики и мониторинга. Целью предлагаемого изобретения является повышение точности и достоверности диагностики,которое достигается путем автоматической классификации вибросигналов,позволяющей построение линейной и древовидной классификации, связывающей имена файлов сигналов с диагностируемыми состояниями технических объектов. Для определения состояния гидроагрегата используют абсолютные и относительные идентификационные измерения. Изобретение относится к области диагностики технического состояния машин и механизмов и может быть использовано для технического состояния в информационно-диагностических системах автоматической диагностики и мониторинга. Известен способ диагностики (Павлов Б.В. Акустическая диагностика механизмов. - М. Машиностроение, 1971. - 224 с.), заключающийся в том, что при диагностике определяют амплитудночастотную характеристику виброакустического канала путем тестового воздействия на различные точки механизма, а спектр соударения определяют путем умножения спектра виброакустического сигнала на амплитудно-частотную характеристику канала передачи виброакустического сигнала. Недостатком известного способа является то, что амплитудно-частотную характеристику виброакустического канала определяют путем быстрого преобразования Фурье (БПФ), при одном фиксированном значении тестового воздействия при фиксированной скорости столкновения. Известен способ (А.С. 506777, Бюл. 1977, 10) оценки технического состояния механизмов,заключающийся в том, что измеряют амплитуды составляющих спектра виброакустического сигнала,выделяют амплитуды составляющих,соответствующие дефектам и неисправностям в виде отдельных импульсов или импульсных последовательностей на частотах, независящих от оборотов механизма, корректируют их с помощью функции коррекции, сравнивают полученные значения составляющих виброакустического сигнала с допустимыми величинами. Недостатком данного способа является то, что функция коррекции не учитывает зависимость ее параметров от свойств виброакустического канала, в частности нелинейности его амплитудно-фазовой характеристики, и амплитуды возбуждающего воздействия, пропорциональной степени деградации износа, погрешности механизма, узла и т. д. Известна информационно-измерительная система АЛМАЗ-ГЭС (Трунин Е.С., Скворцов О.Б. Эксплуатационный контроль технического состояния гидроагрегатов // Электрические станции,2010,6. - С. 38-45), взятая за прототип. В систему входят комбинированные датчики воздушного зазора, позволяющие при работе определять отклонения полюсов ротора генератора от концентричности (механическая форма ротора) и датчик определения искажения магнитного поля ротора. Измерения проводятся на разных режимах. В случае превышения уставок срабатывает сигнализация предупреждения и,при необходимости,автоматический останов гидроагрегата. Программное обеспечение информационно-измерительной системы из-за множества каналов включает сложную базу данных и сигналов (с составляющими спектра) и не предусматривает автоматическую классификацию вибросигналов,что затрудняет принимать объективные решения о состоянии гидроагрегата. 2 Целью предлагаемого изобретения является повышение точности и достоверности диагностики,которое достигается путем автоматической классификации вибросигналов,позволяющей построение линейной и древовидной классификации, связывающей имена файлов сигналов с диагностируемыми состояниями технических объектов. Сущность изобретения. Сущность изобретения поясняется фигурами, на которых изображено на фиг.1 - сигналы изменения зазора в районе нижней крестовины (НК) на фиг.2 - структурная схема исследований на фиг.3 - функции вибросигналов отклонений для объекта диагностики на фиг.4 - блок-схема идентификации сигналов отклонений для объектов диагностики. На фиг.1 представлены сигналы изменений параметров вибросигналов - с датчиков зазора между валом и опорой при малом и большом боях(биениях) вала. Датчики расположены под 90 градусов в плоскости, перпендикулярной валу в районе нижней крестовины генераторного подшипника гидроагрегата. Датчик 1 расположен на стороне Верхнего бьефа - ВБ (место высокого уровня воды), датчик 2 установлен со стороны Правого берега реки - ПБ. Для определения состояния гидроагрегата используются абсолютные и относительные идентификационные измерения. Под абсолютными понимаются такие измерения входного сигнала, при которых эталон для сравнения формируется из самого сигнала, т.е. привязывается к сигналу. При относительных идентификационных измерениях используются эталоны, независящие от входного сигнала. Структурная схема исследования (фиг.2) состоит из считывателя(СС),идентификационного анализатора сигналов (ИАС), компаратора (К), базы данных эталонных сигналов (БДЭС), табличного и иерархического классификатора (ТК и ИК),интерпретатора. С помощью считывателя сигналов происходит чтение с диска реализаций вибросигналов,принадлежащих четырем объектам. Исследуемые сигналы анализируются двумя каналами абсолютных и относительных измерений(КАИ и КОИ). Блок ИЛС измеряет несколько интегральных идентификационных параметров сигналов, из которых в дальнейшем анализе используются два степень регулярности ( ) и степень ассиметрии ( ). Эти параметры служат для построения двумерной табличной классификации (блок ТК), показанной в правой верхней части фиг.2). При этом степень регулярностихарактеризует относительное содержание регулярной компоненты в анализируемом сигнале, а степень ассиметрии- смещение моды распределения от его центра. Блоки К и БДЭС служат для измерения отклонений входных сигналов от системы из 17 эталонных сигналов с известными распределениями мгновенных значений 2 - двумодальноеарксинусное - - Бурнулли с левой ассиметричностью - -Бернулли с правой ассиметричностью- биномиальноеравномерное- экспоненциальноегамма- нормальное- Кошидвустороннее экспоненциальное- Пуассона- Рэлея- треугольноетреугольное с правой ассиметричностьютреугольное с левой ассиметричностьютрапецеидальное. Чтобы правильно оценить суммарное значение отклонений, исследуемые и эталонные сигналы должны иметь одинаковое число отсчетов(одинаковые объемы выборок, ). Таблица отклонений представлена в нижней части фиг.2. Блок ИК производит сортировку эталонных сигналов по отклонениям для каждого из входных сигналов с тем, чтобы построить из имен эталонов классификационное дерево. Структура программного кода исследовательской системы выполнена в среде графического программирования, с помощью которой создана реляционная база данных) результатов измерений идентификационных параметров входных сигналов. Путем сортировки и фильтрации записей базы данных создается линейная и древовидная классификация, связывающая имена файлов сигналов с диагностируемыми состояниями объектов. Распознающая система(Фиг.2) является интеллектуальным анализатором и содержит встроенную базу данных эталонов, представляющие собой сортированные распределения мгновенных значений(РМЗ) случайных сигналов и автоматически настраивающиеся на определенный объем исследуемой выборки входного сигнала. Интеллектуальная мощность системы и разрешающая способность иерархической классификации зависит от количества используемых эталонов. Временные и корреляционные функции сигналов представлены на фиг. 3. Путем идентификации их объекты диагностики разделены на 4 класса(Таблица 1, в которой-равномерное распределение,- треугольное распределение, - распределение Пуассона,распределение Рэлея. Индекс 1 означает левую ассиметричность распределения, индексозначает правую ассиметричность распределения). Идентификация осуществляется путем присвоения этим функциям имен эталонов внутренней базы данных по принципу минимума отклонения между значениями идентификационных параметров сигнала и эталона. На основе идентификационной таблицы сформирован алгоритм автоматической классификации объектов диагностики (фиг.4). В структуре алгоритма учтено то обстоятельство, что каждый объект характеризуется набором из двух логически связанных лингвистических термов, например - (ВБмб). Свободные выходы(Резерв) позволяют выделить дополнительные ситуации (в таблице 1 отсутствуют). Функционирование алгоритма реализуется на основе применения канала относительных измерений исследовательской системы следующими этапами. Этап 1. В информационно-измерительную систему посредством считывателя СС (фиг.2) вводятся вибросигналы с датчиков - реальные изменения отклонений (зазора) между валом и опорой во времени. Этап 2. В СС проводится равномерная дискретизация введенного вибросигнала отклонений,далее для выборки 1000 определяется его форма распределение мгновенных значений (блок 1 - РМЗ КЛ). Этап 3. Параллельно с определением формы вибросигнала в СС с применением встроенного программного пакета среды графического программирования определяется корреляционная функция вибросигнала отклонений,для которой далее для выборки 1000 также определяется соответствующая форма распределение мгновенных значений (блок 2 - РМЗ КОРР Ф ОТКЛ). Этап 4. Измеренное РМЗ вибросигнала отклонений последовательно, в компараторе К сравнивается с РМЗ эталонных сигналов с известными распределениями мгновенных значений, записанных в базе данных БДЭС (блоки 3,4, 7). Этап 5. Измеренное РМЗ корреляционной функции отклонений последовательно в компараторе К сравнивается с РМЗ эталонных сигналов с известными распределениями мгновенных значений, записанных в базе данных БДЭС (блоки 2,5,6). Этап 6. Формирование в иерархическом классификаторе логических заключений путем логических перемножений результатов сравнения с РМЗ эталонных сигналов, в частностина выходе блока 9 формируется положительный результат - логическая 1 при одновременном поступлении на входы положительных результатов сравнения - ДА 1) если З распределение мгновенных значений вибросигнала равно эталонному равномерному распределению с правой ассиметричностью и 2) если З распределение мгновенных значений корреляционной функции вибросигнала равно эталонному треугольному распределению с левой ассиметричностью в противном случае на выходе блока 9 формируется отрицательный результат логический 0 на выходе блока 10 формируется положительный результат - логическая 1 при одновременном поступлении на входы положительных результатов сравнения - ДА 1) если З - распределение мгновенных значений вибросигнала равно эталонному равномерному распределению и 2) если З распределение мгновенных 3 значений корреляционной функции вибросигнала равно эталонному треугольному распределению с левой ассиметричностью в противном случае на выходе блока 10 формируется отрицательный результат - логический 0 на выходе блока 11 формируется положительный результат - логическая 1 при одновременном поступлении на входы положительных результатов сравнения - ДА 1) если З - распределение мгновенных значений вибросигнала равно эталонному треугольному распределению и 2) если, З распределение мгновенных значений корреляционной функции вибросигнала равно эталонному распределению Пуассона в противном случае на выходе блока 11 формируется отрицательный результат - логический 0 на выходе блока 12 формируется положительный результат - логическая 1 при одновременном поступлении на входы положительных результатов сравнения - ДА 1) если З - распределение мгновенных значений вибросигнала равно эталонному треугольному распределению и 2) если З распределение мгновенных значений корреляционной функции вибросигнала равно эталонному распределению Рэлея в противном случае на выходе блока 12 формируется отрицательный результат - логический 0. Этап 7. Вывод результата распознавания - имени состояние объекта диагностики при положительном результате на входе соответствующего блокана выходе блока 13 - ПБ(мб) - правый берег,малый бойна выходе блока 14 - ПБ(бб) - правый берег,большой бойна выходе блока 15 - ВБ(бб) - верхний бьеф(место высокого уровня воды), большой бойна выходе блока 16 - ВБ(мб) - верхний бьеф,малый бойна выходе блоков 17 и 18 - Резерв - свободные выходы позволяют выделять дополнительные режимы и ситуации, например, промежуточные,критические, близкие к аварийным. Предложенный способ диагностики гидроагрегатов разработан в рамках творческого сотрудничества между Северо-Казахстанским государственным университетом им. М. Козыбаева,Омским государственным университетом и ООО Диамех 2000. Таблица 1 Идентификационная таблица Имя РМЗ временной функции сигналов 1. Способ распознавания диагностических сигналов гидроагрегатов,включающий использование абсолютных и относительных идентификационных измерений, отличающийся тем, что эталон для сравнения входного сигнала формируют из самого сигнала используют базу данных эталонных сигналов для измерения отклонений входных сигналов и построения из имен эталонов классификационного дерева. Имя РМЗ корреляционной функции сигналов Имя - состояние объекта диагностики ВБ (бб) ВБ (мб) ПБ (бб) ПБ (мб) 2. Способ по п.1, отличающийся тем, что исследуемые сигналы анализируют по степени регулярности и ассиметрии. 3. Способ по п.1, отличающийся тем, что идентификацию временных и корреляционных сигналов осуществляют путем присвоения имен эталонов внутренней базы данных по принципу минимума отклонений между значениями идентификационных параметров сигнала и эталона.
МПК / Метки
МПК: G01M 15/00, G01M 7/02
Метки: диагностических, способ, распознавания, гидроагрегатов, сигналов
Код ссылки
<a href="https://kz.patents.su/6-ip30842-sposob-raspoznavaniya-diagnosticheskih-signalov-gidroagregatov.html" rel="bookmark" title="База патентов Казахстана">Способ распознавания диагностических сигналов гидроагрегатов</a>
Способ генерирования периодических сигналов
Номер инновационного патента: 20346
Опубликовано: 17.11.2008
Авторы: Кликушин Юрий Николаевич, Кошеков Кайрат Темирбаевич, Кобенко Вадим Юрьевич
МПК: H03B 29/00, G06G 7/26
Метки: периодических, способ, генерирования, сигналов
Формула / Реферат:
Изобретение относится к области радиотех-ники, в частности к генерированию периодических сигналов с требуемой амплитудой, количеством периодов и точностью в широком диапазоне частот и формы, определяемой функцией распределения задающего случайного сигнала, и может быть использовано в автоматике, вычислительной технике и диагностике, например, в автоматизированных системах управления и контроля.Способ состоит из двух этапов:1. Первый этап...
Способ формирования сигналов, соответствующих изображению, и устройство для его осуществления
Номер патента: 4797
Опубликовано: 15.10.1998
Авторы: Эдвард Панофски, Ира Финкельштайн, Кристоф Айзенбарт, Деннис Мак Ги
МПК: H04N 3/14
Метки: изображению, соответствующих, формирования, сигналов, устройство, способ, осуществления
Формула / Реферат:
Изобретение относится к устройству и способу формирования сигналов, соответствующих изобретению.Устройство формирования сигналов, соответствующих изображению, содержит механизм транспортирования листов с объектами мимо датчика. Датчик сканирует объекты и формирует поток данных, которые масштабируются в умножителе для компенсации изменения скорости механизма транспортирования. Когда скорость транспортирования становится значительно меньше...
Способ фильтрации цифровых сигналов
Номер предварительного патента: 13597
Опубликовано: 15.10.2003
Авторы: Рутгайзер Олег Зиновьевич, Тубекбаева Куралай Амановна
МПК: G11B 20/18, G11B 20/24
Метки: способ, цифровых, сигналов, фильтрации
Формула / Реферат:
Изобретение относится к фильтрации цифровыхсигналов, преимущественно при наличииперекрёстных помех в многожильномкоммуникационном кабеле. Техническимрезультатом изобретения является повышениебыстродействия фильтрации цифровых сигналов,преимущественно при наличии перекрёстных помех.Устройство, реализующее предлагаемый способфильтрации, содержит каналы 1, 2, 3, 4, блок 5измерения результирующих сигналов, блок 6дифференцирования сигнала, блок 7...
Способ преобразования аналоговых сигналов

Номер патента: 717
Опубликовано: 15.03.1994
Автор: Хайдаров Карим Аменович
МПК: G06K 3/02
Метки: преобразования, способ, аналоговых, сигналов
Формула / Реферат:
СПОСОБ ПРЕОБРАЗОВАНИЯ АНАЛОГОВЫХ СИГНАЛОВ, включающий выбор точек измерения, сравнение величин сигналов в смежных точках, а также интервалов, разделяющих смежные точки измерения, отличающийся тем, что, с целью увеличения помехоустойчивости при обеспечении относительной обратимости преобразования, сравнение величин сигналов в точках измерения, а также сравнение интервалов, разделяющих эти точки, производят попарно всех между собой, причем при...
Устройство для уменьшения приема искажённых спутниковых сигналов
Номер инновационного патента: 28248
Опубликовано: 17.03.2014
МПК: G01S 7/36
Метки: сигналов, спутниковых, искажённых, уменьшения, приема, устройство
Формула / Реферат:
Устройство для уменьшения приема искажённых спутниковых сигналовИзобретение относится к GPS антеннам и может быть использовано для уменьшения искажения сигнала от глобальных спутниковых систем в условиях влияния «многолучивости» и «теневого эффекта». Применяется в горной промышленности, при наблюдениях за сдвижением карьерных откосов, геодинамических исследованиях; в строительстве, при мониторинге строительных сооружений, зданий и мостов; в...
Предыдущий патент: Способ диагностики степени тяжести преэклампсии по показателям дисфункции эндотелия
Следующий патент: Способ обнаружения электромагнитного излучения
Случайный патент: Сырьевая смесь для получения силикатного бетона