Автоматизированная система ЭВАК и мониторинга транспортных средств
Номер полезной модели: 1395
Опубликовано: 15.02.2016
Авторы: Ахмедов Даулет Шафигуллович, Молдабеков Мейрбек Молдабекович, Шабельников Евгений Алексеевич, Конысбаев Еркегали Калыбекович, Донец Сергей Константинович
Формула / Реферат
РЕФЕРАТ
Автоматизированная система ЭВАК и мониторинга транспортных средств
Полезная модель относится к области навигации, а именно к системам для определения местоположения стационарных и подвижных объектов по сигналам космических навигационных систем и их мониторинга с целью контроля и слежения за их перемещением, в частности к регистрации транспортных средств по пути следования путем автоматической передачи информации о местоположении и может быть использована для охраны и управления подвижными объектами посредством регистрации информации о маршруте движения объекта и других его параметрах при проведении спасательных, охранно-поисковых, навигационных, телематических (связанных с мониторингом и эксплуатацией транспортных средств) работ.
Технический результат заключается в существенном расширении функциональных возможностей, в обеспечении непрерывного контроля и мониторинга неограниченного количества мобильных и стационарных объектов, в способности обеспечить возможность мониторинга объектов разной специфики.
Автоматизированная система ЭВАК и мониторинга транспортных средств содержит диспетчерский пункт с персональным компьютером, приемником информации по Wi-Fi, Bluetooth, 3-G ИК и/или WiMAX (LTE) каналам и устройством, считывающим информацию с переносного запоминающего устройства и бортовой комплекс подвижного объекта, включающий навигационный двухсистемный ГЛОНАСС+GPS приемник с антенной и вычислительный блок, устройство для передачи информации по Wi-Fi, Bluetooth, 3-G, ИК и/или WiMAX (LTE) каналам, модуль GSM/GPRS и программное устройство с записью маршрута его движения, а также переносное запоминающее устройство с возможностью его подключения к персональному компьютеру диспетчерского пункта, аппаратуру для записи параметров, в том числе: частоты вращения двигателя, расхода топлива, веса груза, положения кузова, идентификации водителя, состояния тревожной кнопки, охранных датчиков, при этом дополнительно введены диспетчерский центр оперативного реагирования, включающий сервер приложений и сервер базы данных, рабочие станции операторов (РСО) диспетчерского центра, средства экстренного реагирования при авариях и альтернативный канал приема-передачи данных по спутниковому модему, кроме того в бортовой комплекс дополнительно введены: процессор класса ARM, 3* осевой акселерометр, отдельный GSM-модуль и интерфейсы RS-485 и CAN для подключения дополнительных датчиков, в том числе датчиков уровня топлива, датчиков физического состояния человека и/или других датчиков.
Текст
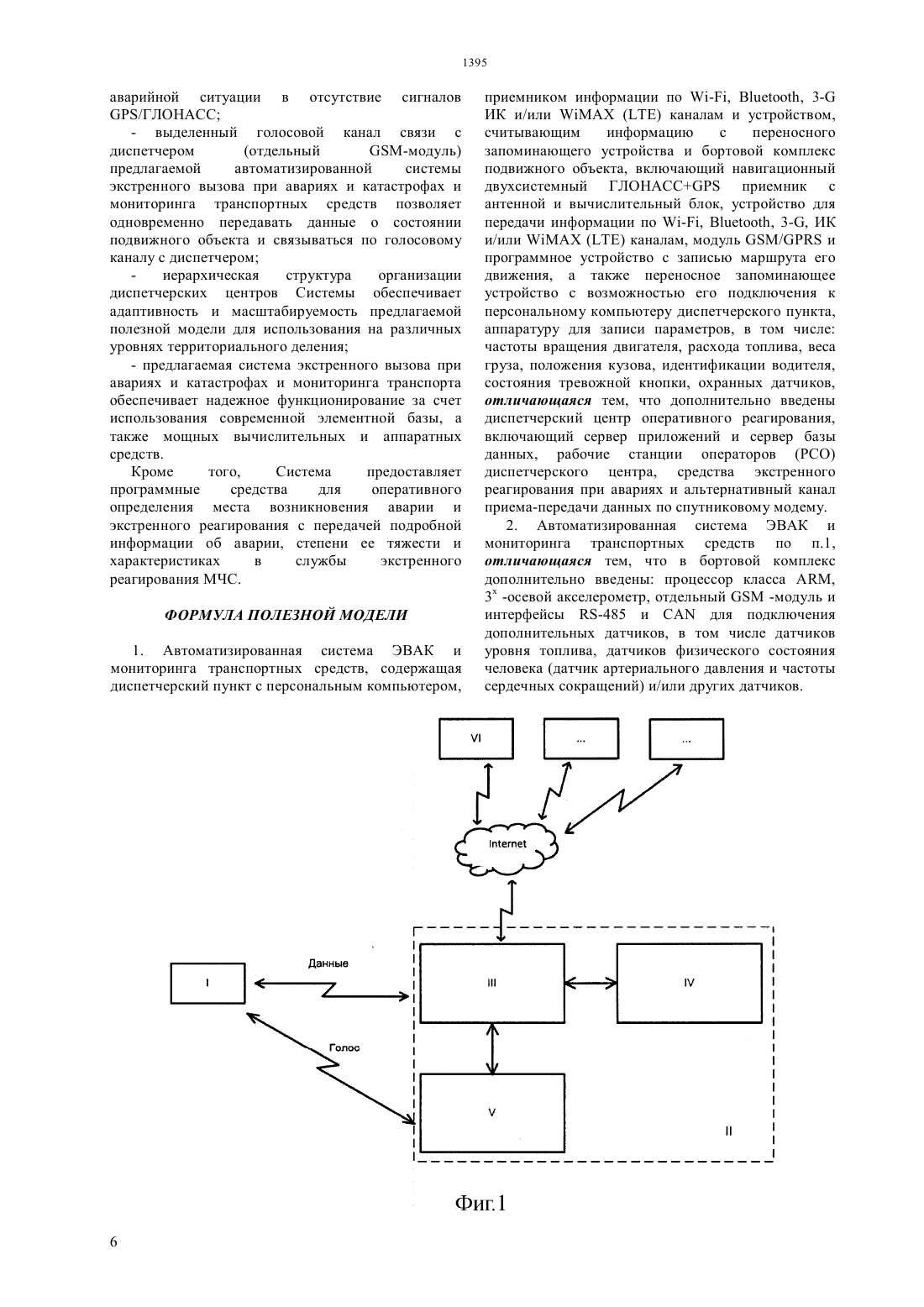
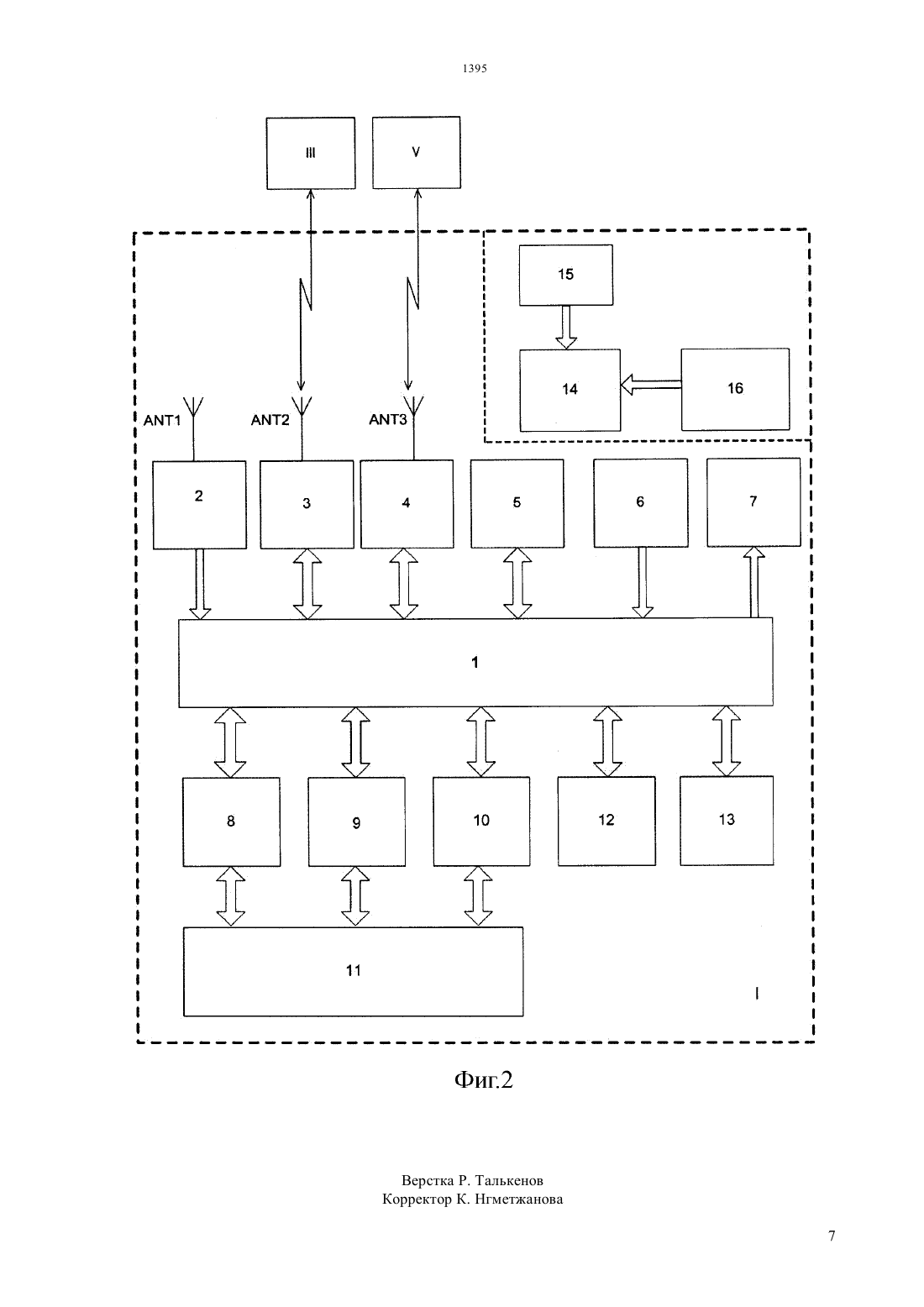
МИНИСТЕРСТВО ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН ОПИСАНИЕ ПОЛЕЗНОЙ МОДЕЛИ К ПАТЕНТУ способности обеспечить возможность мониторинга объектов разной специфики. Автоматизированная система ЭВАК и мониторинга транспортных средств содержит диспетчерский пункт с персональным компьютером,приемником информации по -, , 3 ИК и/иликаналам и устройством,считывающим информацию с переносного запоминающего устройства и бортовой комплекс подвижного объекта, включающий навигационный двухсистемный ГЛОНАСС приемник с антенной и вычислительный блок, устройство для передачи информации по -, , 3-, ИК и/иликаналам, модуль / и программное устройство с записью маршрута его движения, а также переносное запоминающее устройство с возможностью его подключения к персональному компьютеру диспетчерского пункта,аппаратуру для записи параметров, в том числе частоты вращения двигателя, расхода топлива, веса груза, положения кузова, идентификации водителя,состояния тревожной кнопки, охранных датчиков,при этом дополнительно введены диспетчерский центр оперативного реагирования, включающий сервер приложений и сервер базы данных, рабочие станции операторов (РСО) диспетчерского центра,средства экстренного реагирования при авариях и альтернативный канал приема-передачи данных по спутниковому модему, кроме того в бортовой комплекс дополнительно введены процессор класса, 3 осевой акселерометр, отдельный модуль и интерфейсы -485 идля подключения дополнительных датчиков, в том числе датчиков уровня топлива, датчиков физического состояния человека и/или других датчиков.(72) Ахмедов Даулет Шафигуллович Донец Сергей Константинович Конысбаев Еркегали Калыбекович Молдабеков Мейрбек Молдабекович Шабельников Евгений Алексеевич(73) Дочернее Товарищество с ограниченной ответственностью Институт космической техники и технологий(54) АВТОМАТИЗИРОВАННАЯ СИСТЕМА ЭВАК И МОНИТОРИНГА ТРАНСПОРТНЫХ СРЕДСТВ(57) Полезная модель относится к области навигации, а именно к системам для определения местоположения стационарных и подвижных объектов по сигналам космических навигационных систем и их мониторинга с целью контроля и слежения за их перемещением, в частности к регистрации транспортных средств по пути следования путем автоматической передачи информации о местоположении и может быть использована для охраны и управления подвижными объектами посредством регистрации информации о маршруте движения объекта и других его параметрах при проведении спасательных,охранно-поисковых,навигационных,телематических (связанных с мониторингом и эксплуатацией транспортных средств) работ. Технический результат заключается в существенном расширении функциональных возможностей, в обеспечении непрерывного контроля и мониторинга неограниченного количества мобильных и стационарных объектов, в Полезная модель относится к области навигации,а именно к системам для определения местоположения стационарных и подвижных объектов по сигналам космических навигационных систем и их мониторинга с целью контроля и слежения за их перемещением, в частности, к регистрации транспортных средств по пути следования путем автоматической передачи информации о местоположении и может быть использована для охраны и управления подвижными объектами посредством регистрации информации о маршруте движения объекта и других его параметрах при проведении спасательных,охранно-поисковых,навигационных,телематических (связанных с мониторингом и эксплуатацией транспортных средств) работ. Из уровня техники известна автоматизированная система геопозиционирования стационарных и подвижных объектов (Патент РК на полезную модель 743, кл. 08 1/123, 2011). Система содержит удаленный терминал мониторинга стационарного и мобильного объекта, программноаппаратный комплекс, снабженный сотовым трансивером, выход которого подключен к входу сервера приема, обработки и анализа данных, в состав которого входят программный блок распределения нагрузки, между равнозначными программно-аппаратными комплексами, связанный с программным блоком приема/передачи телеметрических данных,соединенным с программным блоком контроля и управления терминалами и программным блоком технологического,статистического и геоинформационного анализа, который подключен к программному блоку контроля взаимодействия с геоинформационными и пользовательскими базами данных. Сервер приема, обработки и анализа связан с сервером хранения геоинформационных и пользовательских баз данных и оперативной базы данных, в состав которого входят последовательно соединенные геоинформационные и пользовательские реляционные базы данных,оперативная база данных событий и программный блок кластеризации реляционных баз данных между равнозначными программно-аппаратными комплексами. Сервер хранения геоинформационных и пользовательских баз данных и оперативной базы данных соединен с сервером пользовательского и технологического доступа, который содержит программный блок технологического доступа сторонних охранных систем и систем специального назначения (СОРМ) и программный блок пользовательского и административного доступа,соединенный с программным блоком управления и визуализации геоданных(картографический материал), связанным с реляционной базой геоданных и программным блоком распределения,между равнозначными программно-аппаратными комплексами, нагрузки пользовательского и технологического доступа. Кроме того,предусмотрена возможность включения неограниченного числа равнозначных программноаппаратных комплексов, а также 2 возможность масштабировать систему путем параллельного запуска связанных по каналам передачи данных неограниченного числа равнозначных систем. Система используется для определения местоположения стационарных и подвижных объектов по сигналам космических навигационных систем и их мониторинга. К недостаткам данной системы относится отсутствие высокоскоростного канала передачи данных 3 (приоритет доступа к сети передачи данных черезниже, чем через 3 - ),отсутствие альтернативных каналов передачи данных и отсутствие системы экстренного реагирования. Известная автоматизированная система контроля автомобильного транспорта (Патент РК на полезную модель 594, кл. 08 1/123, 2010) содержит средства навигации, терминал транспортного средства, включающий модем сотовой связи с возможностью выхода в Интернет, соединенный по шинам данных и управления с процессором,бортовой контроллер, содержащий связанный с процессором блок памяти, приемник сигналов спутниковой навигации,сопроцессор с подключенными к нему устройствами хранения информации и блоком периферийного оборудования,информационно-аналитическая система состоит из сервера, содержащего объединенную по шинам данных и управления с операционной системой базу данных, модуля сортировки данных с возможностью их обработки,АРМа диспетчеров пользователей, размещенных в произвольных точках, при этом сервер и АРМ диспетчеров имеют возможность выхода в Интернет. Блок периферийного оборудования содержит датчики ускорения, веса, средства подачи экстренных сигналов диспетчеру,средства управления диспетчером работой функциональных узлов системы. Система используется для оперативного управления и контроля автотранспортных предприятий. Однако в данной системе, кроме недостатков,присущих вышеупомянутой системе отсутствуют-сигнала при нажатии на кнопку и при ударе,голосовой канал связи, датчики физического состояния человека (давление, пульс), резервное питание, кроме того, система работает только в режиме трекера. Известен также малогабаритный комплекс мониторинга для определения местоположения подвижных объектов (Патент РФ на полезную модель 96276, 08 1/123, 2010), который включает терминал мониторинга стационарного и мобильного объекта, содержащий удаленный терминал мониторинга стационарного и мобильного объекта,выполненный в виде трекера,мини-ноутбук,карманный персональный компьютер,-антенну,передающую и принимающую данные через средства обеспечения-обмена, при этом -обмен данных происходит через сетьс мини-ноутбуком, с карманным персональным компьютером и с телематическим сервером. Комплекс используется для определения местоположения подвижных объектов (людей и животных) по сигналам космических навигационных систем и их мониторинга с целью контроля и слежения за их перемещением. В данном комплексе также отсутствует сигнал при нажатии на кнопку и при ударе,отсутствуют средства регистрации ДТП (ударов,аварий), ограниченная скорость передачи данных на сервер по(приоритет доступа к сети передачи данных черезниже, чем у высокоскоростных каналов 3/), а также отсутствует голосовой канал связи. Наиболее близкое к заявляемой полезной модели по совокупности признаков техническое решение предложено в известной системе навигации, охраны и мониторинга подвижных объектов (Патентна полезную модель 99643, кл. 08 1/123, В 60 25/00, 08 В 25/10, 2010). Система содержит диспетчерский пункт с персональным компьютером,а также установленный на подвижном объекте навигационный двухсистемный ГЛОНАСС приемник с антенной и вычислительный блок. Подвижный объект снабжен устройством для передачи информации по -, , 3-, ИК и/иликаналам и переносным запоминающим устройством с возможностью его подключения к персональному компьютеру диспетчерского пункта, при этом последний снабжен приемником информации по - 3- ИК и/иликаналам и устройством,считывающим информацию с переносного запоминающего устройства. Кроме того, подвижный объект снабжен программным устройством с записью маршрута его движения, а также аппаратурой, включая видеокамеры, для записи параметров, в том числе частоты вращения двигателя, расхода топлива, веса груза, положения кузова, идентификации водителя,состояния тревожной кнопки, охранных датчиков. При этом навигационный приемник ГЛОНАСС,вычислительный блок, аккумулятор, программное устройство, устройство для передачи информации по -, , 3, ИК и/иликаналам и модуль / конструктивно встроены в корпус мультимедийного головного устройства подвижного объекта. К недостаткам наиболее близкого аналога можно отнести следующее- отсутствие средств регистрации дорожнотранспортных происшествий (ДТП) (ударов, аварий) и средств экстренного реагирования при авариях и ДТП 4- отсутствие средств слежения за состоянием здоровья водителя и/или пассажиров 4 отсутствие возможности получать навигационные данные при отсутствии сигналов спутниковых систем /ГЛ, и нет альтернативного канала передачи данных, не зависящего от состояния /сетей. Технической задачей предлагаемой полезной модели является создание высокотехнологичной системы, которая могла бы преодолеть указанные выше недостатки существующих аналогов,сохранять высокую работоспособность в условиях отсутствия или неуверенного приема сигналов спутниковой навигации, способную на экстренное реагирование при авариях и катастрофах,повышение надежности системы,снижение стоимости получения информации, а также повышение надежности системы. Технический результат,получаемый при использовании предлагаемой полезной модели,заключается в существенном расширении функциональных возможностей, в обеспечении непрерывного контроля и мониторинга технологических процессов неограниченного количества мобильных и стационарных объектов, в способности обеспечить возможность мониторинга объектов разной специфики (транспорт, грузы,жилые и складские помещения, люди, животные и т.д.),решать задачи служб обеспечения безопасности и целостности грузов, а также задачи диспетчеризации общественного городского и междугороднего транспорта, такси и т.д. Технический результат достигается тем, что в систему, содержащую диспетчерский пункт с персональным компьютером,приемником информации по -, , 3- ИК и/или каналам и устройством,считывающим информацию с переносного запоминающего устройства, и бортовой комплекс подвижного объекта, включающий навигационный двухсистемный ГЛОНАСС приемник с антенной и вычислительный блок, устройство для передачи информации по -, , 3-, ИК и/иликаналам, модуль / и программное устройство с записью маршрута его движения, а также переносное запоминающее устройство с возможностью его подключения к персональному компьютеру диспетчерского пункта,аппаратуру для записи параметров, в том числе частоты вращения двигателя, расхода топлива, веса груза, положения кузова, идентификации водителя,состояния тревожной кнопки, охранных датчиков,согласно предлагаемой полезной модели дополнительно введен диспетчерский центр оперативного реагирования, включающий сервер приложений, сервер базы данных и рабочие станции операторов (РСО) диспетчерского центра. Указанный технический результат достигается тем, что предлагаемая автоматизированная система ЭВАК и мониторинга транспортных средств оснащена средствами экстренного реагирования при авариях на базе усовершенствованного диспетчерского центра и дополнена альтернативным каналом приема-передачи данных по спутниковому модему. Кроме того, в отличие от известной системы, для достижения указанного технического результата в бортовой комплекс дополнительно введены процессор класса , 3 х осевой акселерометр,отдельный -модуль и интерфейсы -485 идля подключения дополнительных датчиков, в том числе датчиков уровня топлива, датчиков физического состояния человека (например, датчик 3 артериального давления и частоты сердечных сокращений) и/или других датчиков. Для достижения технического результата бортовой комплекс предлагаемой системы также дополнительно снабжен спутниковым модемом для передачи данных по альтернативному спутниковому каналу связи,энергонезависимой памятью,устройством аудиозаписи,резервным аккумулятором и выполнен с возможностью подачи-сигнала при ударе транспортного средства. Сущность полезной модели поясняется описанием предпочтительного варианта воплощения со ссылками на прилагаемые графические материалы. На фиг.1 приведена структурная схема автоматизированной системы ЭВАК и мониторинга транспортных средств, на фиг.2 представлена блок-схема бортового комплекса мониторинга транспорта. Согласно предлагаемой полезной модели,автоматизированная система ЭВАК и мониторинга транспортных средств (далее - Система) (фиг.1) содержит бортовой комплексмониторинга транспорта, диспетчерский центроперативного реагирования,включающий высокопроизводительный серверприложений с программным обеспечением обработки данных,сервербазы данных для хранения информации,голосовой шлюздля обработки голосовых вызовов и рабочие станции операторов (РСО) . Диспетчерский центр оперативного реагирования представляет собой аппаратнопрограммный комплекс и включает высокопроизводительный серверприложений с программным обеспечением обработки данных,сервербазы данных для хранения информации и голосовой шлюздля обработки голосовых вызовов. Диспетчерский центрвыполняет следующие функции- принимает сообщения от бортовых комплексовтранспортных средств с использованием протоколов , таких как / и- обрабатывает полученные сообщения и определяет место возникновения аварии и степень тяжести по показаниям датчиков бортового оборудования- формирует экстренные сообщения для операторов диспетчерского центра- принимает входящие голосовые вызовы от бортового оборудования, а также позволяет устанавливать исходящие вызовы для удаленного инструктажа по оказанию первой медицинской помощи- обеспечивает структурированное хранение и выдачу всей информации, поступающей и циркулирующей в Системе- позволяет формировать отчеты с возможностью фильтрации данных по различным показателям- предоставляет возможность удаленной работы с Системой при установлении безопасного Интернетсоединения. Бортовой комплекс мониторинга транспорта(фиг.2) содержит микропроцессорный модуль 1 на 4 базе , к которому подключены навигационный двухсистемный /ГЛОНАСС приемник 2, 3 модуль 3, -модуль 4 для голосового канала,последовательный порт 5 для подключения внешнего-//УКВ-модулей и/или спутникового модема для передачи данных,интерфейс для подключения внешнего модуля 6 кнопкис микрофоном, интерфейс для подключения внешнего громкоговорителя 7,соединенные с микропроцессором через дискретные и аналоговые входы -485 8, интерфейс 9 и интерфейс 10, внешние датчики 11, 3 х осевой-акселерометр 12, -память 13 и модуль питания, содержащий блок питания 14, бортовую сеть питания 15 и резервный - аккумулятор 16. Также в составе бортового комплекса имеются светодиодные индикаторы для отображения режимов работы бортового комплекса, антенна/ГЛ, подключенная к радиочастотному входу приемника 2 /ГЛ, -антенна,подключенная к радиочастотному разъемумодема 4, и вторая -антенна, подключенная к радиочастотному разъему 3-модема 3. Микропроцессорный модуль 1 обеспечивает высокую скорость работы бортового комплекса и высокую вычислительную способность за счет мощного процессорного ядра, большого объема оперативной памяти и использования встроенной операционной системы. В качестве микропроцессорного модуля может быть использован 536 фирмыили другой с аналогичными параметрами. Особенностью полезной модели является возможность удаленной автоматической перепрошивки обновленного программного обеспечения, находящегося в микропроцессоре 1 бортового комплекса. Миниатюрный навигационный приемник 2 обеспечивает позиционирование транспортного средства с точностью до 1,5 м за счет использования навигационных спутникови ГЛОНАСС для определения навигационных параметров, а также вспомогательные системы обработки навигационных данных. В качестве навигационного приемника могут быть использованы 20 фирмы, 76 фирмы , МАХ-7 фирмы / В качестве внешних датчиков 11 могут быть подключены датчик уровня топлива, датчики физического состояния человека(датчик артериального давления и частоты сердечных сокращений) и/или другие датчики. В качестве датчика 12 удара может быть использован 3 х осевой -акселерометр,который не только регистрирует удары транспортного средства при столкновениях по трем осям в пределах 200, но и определяет параметры движения объекта в отсутствии спутниковых навигационных сигналов. В качестве -памяти 13 можно применить), -карту с объемом не менее 512 Мбайт. Герметичный корпус бортового комплекса позволяет использовать его при любых погодных условиях. Автоматизированная система ЭВАК и мониторинга транспортных средств обеспечивает выполнение следующих функций определение координат,скорости и направления движения объекта по сигналам глобальных навигационных спутниковых систем- определение движения объекта в отсутствие сигналов спутниковых навигационных систем при помощи 3 х осевого акселерометра 15- подключение и считывание данных с внешних датчиков 11, регистрирующих состояние и параметры подвижного объекта,а также физического состояния водителя- сохранение навигационных данных и параметров подвижного объекта во встроенной- передачу накопленных навигационных данных и параметров объекта на сервердиспетчерского центра по каналам 3/ либо через внешний спутниковый модем или внешние модули УКВ//- экстренный вызов диспетчера системы ЭВАК при нажатии на кнопку 6 и при срабатывании датчика удара (3 х осевого акселерометра) 12- голосовую связь водителя транспорта с диспетчером системы ЭВАК через минигарнитуру или внешний громкоговоритель 7 с микрофоном. Автоматизированная система ЭВАК и мониторинга транспортных средств работает следующим образом. При включении бортового комплекса(фиг.2) микропроцессорным модулем 1 инициализируется и проверяется работоспособность периферийного оборудования. В случае неисправности какого-либо компонента комплекса или наступления аварийной ситуации информация от навигационных приборов 2, датчиков 11, 12 поступает в микропроцессорный модуль 1, который формирует информационные пакеты, заносит их в энергонезависимую память 13, где она сохраняется до момента успешной отправки на серверприложений и одновременно передает пакеты на серверприложений диспетчерского центраСистемы(кроме звуковых файлов). Периодичность снятия показаний с каждого из датчиков 11, 12 задатся в секундах, а все настройки и сами исполняемые коды программы управления бортовым комплексом сохраняются в энергонезависимую -память 13. Возникновение аварийной ситуации определяется нажатиемкнопки 6 и/или при превышении критического значения ускорения в заданный промежуток времени датчика акселерометра 12. После инициации критической ситуации осуществляется автоматический дозвон черезмодем 4 по заданному телефонному номеру в диспетчерский центроперативного реагирования, и, кроме того, микропроцессорный модуль 1 формирует пакет содержащий информацию датчиков 11, 12 с наивысшим приоритетом отправки для передачи его на серверприложений диспетчерского центраСистемы по каналам сотовой сети связи стандарта . Сервер приложений(фиг.1) проверяет целостность пакета при помощи контрольной суммы. Программное обеспечение, функционирующее на сервереприложений, производит обработку полученной информации и по координатам,переданным бортовым оборудованием , определяет и извещает оператора диспетчерского центрао месте возникновения дорожно-транспортного происшествия. Вся информация, поступающая в диспетчерский центрСистемы, сохраняется в базе данных . Кроме этого, программное обеспечение диспетчерского центра оперативного реагирования позволяет принимать на голосовой шлюзСистемы и записывать голосовые вызовы от водителя и пассажиров,осуществляемые посредством оборудования бортового комплекса . После прихода пакета с данными, который содержит информацию об аварийной ситуации, или входящего голосового вызова через голосовой шлюзсервервыбирает свободную рабочую станцию оператора , которая может в данный момент обработать заявку (карточку ДТП). На рабочем дисплее оператора рабочей станцииотображается подробная информация о транспортном средстве марка,количество посадочных мест и т.д. а также последняя траектория движения с показаниями датчиков. Для отображения всей нужной пользователю информации о состоянии транспортного средства и/или его местоположении к серверуподключены рабочие станции операторов(РСО). Программное обеспечение рабочей станции операторапостроено по клиент-серверной технологии тонкий клиент и позволяет организовать распределенную структуру диспетчерского центра, когда серверы диспетчерского центра системы расположены отдельно от рабочих мест операторов . Такая особенность позволяет при необходимости наращивать производительность системы и штат операторов,даже если они будут располагаться в разных частях города или страны. Кроме этого, указанная структура построения диспетчерского центра оперативного реагирования позволяет создать распределенную структуру системы, при которой возможно развертывание диспетчерских центров различного уровня,в зависимости от территориальной зоны ответственности. При этом в диспетчерский центр региона будут поступать экстренные вызовы от бортового оборудования,находящегося в пределах зоны обслуживания базовых станций сотовой сети связи данного региона. Сравнительный анализ показал, что заявленное техническое решение обладает радом преимуществ по сравнению с известными системами 3 хосевой акселерометр позволяет регистрировать удары транспортного средства и получать навигационные данные при наступлении 5- выделенный голосовой канал связи с диспетчером-модуль) предлагаемой автоматизированной системы экстренного вызова при авариях и катастрофах и мониторинга транспортных средств позволяет одновременно передавать данные о состоянии подвижного объекта и связываться по голосовому каналу с диспетчером иерархическая структура организации диспетчерских центров Системы обеспечивает адаптивность и масштабируемость предлагаемой полезной модели для использования на различных уровнях территориального деления- предлагаемая система экстренного вызова при авариях и катастрофах и мониторинга транспорта обеспечивает надежное функционирование за счет использования современной элементной базы, а также мощных вычислительных и аппаратных средств. Кроме того,Система предоставляет программные средства для оперативного определения места возникновения аварии и экстренного реагирования с передачей подробной информации об аварии, степени ее тяжести и характеристиках в службы экстренного реагирования МЧС. ФОРМУЛА ПОЛЕЗНОЙ МОДЕЛИ 1. Автоматизированная система ЭВАК и мониторинга транспортных средств, содержащая диспетчерский пункт с персональным компьютером, 6 приемником информации по -, , 3 ИК и/иликаналам и устройством,считывающим информацию с переносного запоминающего устройства и бортовой комплекс подвижного объекта, включающий навигационный двухсистемный ГЛОНАСС приемник с антенной и вычислительный блок, устройство для передачи информации по -, , 3-, ИК и/иликаналам, модуль / и программное устройство с записью маршрута его движения, а также переносное запоминающее устройство с возможностью его подключения к персональному компьютеру диспетчерского пункта,аппаратуру для записи параметров, в том числе частоты вращения двигателя, расхода топлива, веса груза, положения кузова, идентификации водителя,состояния тревожной кнопки, охранных датчиков,отличающаяся тем, что дополнительно введены диспетчерский центр оперативного реагирования,включающий сервер приложений и сервер базы данных, рабочие станции операторов (РСО) диспетчерского центра, средства экстренного реагирования при авариях и альтернативный канал приема-передачи данных по спутниковому модему. 2. Автоматизированная система ЭВАК и мониторинга транспортных средств по п.1,отличающаяся тем, что в бортовой комплекс дополнительно введены процессор класса ,3 -осевой акселерометр, отдельный-модуль и интерфейсы -485 идля подключения дополнительных датчиков, в том числе датчиков уровня топлива, датчиков физического состояния человека (датчик артериального давления и частоты сердечных сокращений) и/или других датчиков.
МПК / Метки
МПК: G08G 1/123
Метки: транспортных, система, средств, эвак, автоматизированная, мониторинга
Код ссылки
<a href="https://kz.patents.su/7-u1395-avtomatizirovannaya-sistema-evak-i-monitoringa-transportnyh-sredstv.html" rel="bookmark" title="База патентов Казахстана">Автоматизированная система ЭВАК и мониторинга транспортных средств</a>
Автоматизированная система контроля транспортных потоков
Номер полезной модели: 1081
Опубликовано: 17.03.2014
Авторы: Ганчев Виктор Львович, Якунин Владимир Федорович
МПК: G08G 1/01
Метки: автоматизированная, система, потоков, контроля, транспортных
Формула / Реферат:
Полезная модель относится к системам видеонаблюдения и контроля, в частности к системам видеонаблюдения и контроля за перемещением транспортных средств.Автоматизированная система контроля транспортных потоков, содержит видео датчики (ВД и ИКП). устройство наведения, устройство обработки информации, рабочее место опера гора, устройство передачи данных, а также устройство беспроводной связи с удаленными устройствами, устройство подключения...
Система охранной сигнализации транспортных средств
Номер предварительного патента: 8050
Опубликовано: 15.10.1999
Авторы: Чапленко Владимир Иванович, Васильев Иван Вениаминович
МПК: B60R 25/10
Метки: система, средств, сигнализации, транспортных, охранной
Формула / Реферат:
Изобретение относится к оборудованию для предотвращения кражи транспортных средств, например, автомобилей.Технический результат изобретения - снижение стоимости системы охранной сигнализации.Система охранной сигнализации транспортных средств содержит датчики и радиопередатчик, подающий сигнал на приемное декодирующее устройство, радиопередатчик снабжен постоянным запоминающим устройством, содержащим в пейджинговом коде информацию о транспортном...
Способ управления перемещением транспортных средств и система для его осуществления
Номер предварительного патента: 18410
Опубликовано: 16.04.2007
Автор: Агишев Сергей Газизович
МПК: G08G 1/00
Метки: система, управления, способ, перемещением, средств, транспортных, осуществления
Формула / Реферат:
Изобретение относится к способам и системам управления перемещения водного или воздушного, или наземного транспорта вне мегаполюсов, и предназначено для представления водителям возможности выбора оптимальных маршрутов движения.Способ управления перемещением транспортных средств, согласно которому для представления транспортной обстановки все пространство условно разбивают на объединенные в центральном компьютере регионы, каждый из которых имеет...
Система контроля движения транспортных средств
Номер полезной модели: 1118
Опубликовано: 16.06.2014
Автор: Серкебаева Тлеухор
МПК: G08G 1/01
Метки: средств, транспортных, движения, система, контроля
Формула / Реферат:
Полезная модель относится к системам контроля движения транспортных средстви может быть использовано для определения ключевых показателей контроля за движением транспортных средств и дорожного полотна.Техническим результатом является расширение ассортимента функциональных таких характеристик технического решения, как определение скорости и направления транспортного средства, пропускной способности и степени загруженности дорожного полотна, а...
Система контроля движения транспортных средств
Номер предварительного патента: 7944
Опубликовано: 16.08.1999
Авторы: Колесников Александр Владимирович, Муканов Димкеш Муканович, Моисеенко Владимир Юрьевич
МПК: G08C 19/28
Метки: контроля, движения, транспортных, система, средств
Формула / Реферат:
Изобретение относится к области автоматизации диспетчерского управления пассажирским транспортом и может быть использовано для управления движением автобусов.Для повышения надежности работы и быстродействия система контроля движения транспортных средств содержит устройство контроля подвижной единицы, установленное на транспортном средстве, с приемником и передатчиком, пункты контроля с приемником и передатчиком, центральный блок управления, в...
Предыдущий патент: Пористый резиновый уплотнитель
Следующий патент: Рабочий орган для обработки почвы
Случайный патент: Центробежный распылитель жидкости