Автономная подводная система для четырехмерного мониторинга окружающей среды
Номер патента: 30384
Опубликовано: 15.09.2015
Авторы: ФАВАРЕТТО, Мауро, ГАСПАРОНИ, Франческо, ГРАССО, Тиберио
Текст
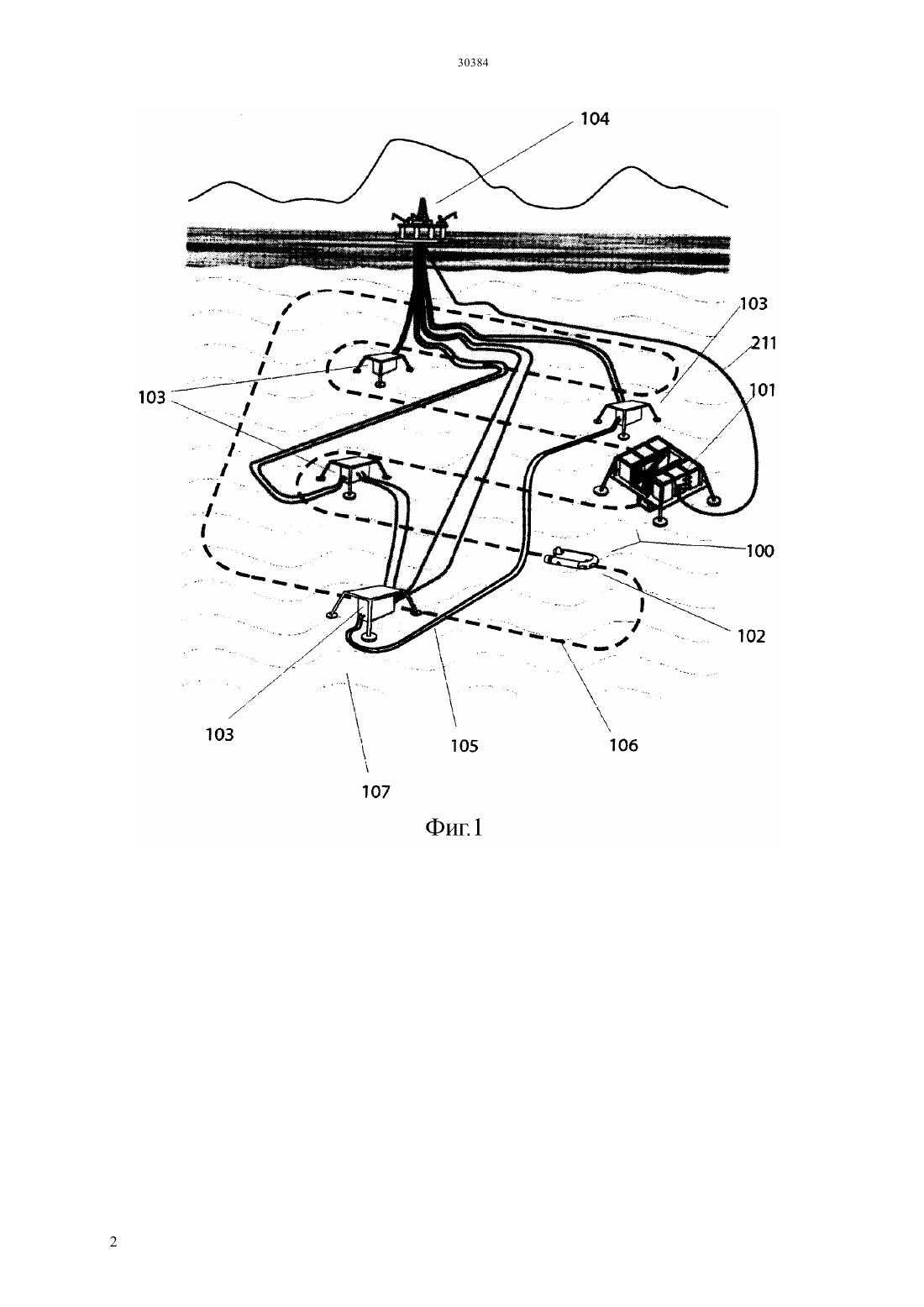
(101),оснащенную бортовыми измерительными средствами (202), по меньшей мере одно автономное модульное подводное транспортное средство (102), выполненное с возможностью перемещения внутри области (107) мониторинга вдоль назначенного маршрута (106), и по меньшей мере один внешний измерительный модуль (206), который может быть соединен с указанным транспортным средством (102), при этом многофункциональная подводная станция (101) содержит загрузочную область (204), интерфейсную систему(207) оснащения транспортного средства (102) измерительным модулем (206) и управляющую систему (201). Автономное модульное подводное транспортное средство (102) автономной подводной системы 100 может быть оснащено бортовыми измерительными датчиками (311) и содержит по меньшей мере один главный движитель (302), по меньшей мере один вспомогательный движитель (305, 306, 307) для точного позиционирования, корпус (301), по меньшей мере один электронный управляющий модуль (313), по меньшей мере один накопитель(312) энергии,по меньшей мере одну соединительную систему (308) и средства (317) для крепления по меньшей мере одного внешнего измерительного модуля (206), при этом внешний измерительный модуль (206) оснащен по меньшей мере одним измерительным датчиком (314). Другой целью изобретения является создание способа, в котором используют многофункциональную подводную станцию (101), внешний измерительный модуль (206) и автономное модульное подводное транспортное средство (102) для сбора во времени данных, относящихся к подводной окружающей среде, и для получения после обработки этих данных четырехмерной картины контролируемой подводной окружающей среды.(74) Тагбергенова Модангуль Маруповна Тагбергенова Алма Таишевна Касабекова Найля Ертисовна(54) АВТОНОМНАЯ ПОДВОДНАЯ СИСТЕМА ДЛЯ ЧЕТЫРЕХМЕРНОГО МОНИТОРИНГА ОКРУЖАЮЩЕЙ СРЕДЫ(57) Автономная подводная система для проведения на месте эксплуатации непрерывного длительного мониторинга широкого диапазона параметров,относящихся к морской окружающей среде,содержит многофункциональную подводную станцию и автономное подводное транспортное средство, взаимодействующие друг с другом для проведения различных исследований окружающей среды. В частности, система обеспечивает мониторинг влияния на окружающую среду деятельности в прибрежной области,характеристику новых месторождений, поддержку мероприятий в загрязненных областях, контроль целостности конструкций,установленных в подводной окружающей среде, и проверку возможного проникновения третьих лиц в зону мониторинга. Автономная подводная система (100) содержит многофункциональную подводную ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Автономная подводная система (100) для мониторинга окружающей среды, содержащая многофункциональную подводную станцию (101),оснащенную бортовыми измерительными средствами (202), по меньшей мере одно автономное модульное подводное транспортное средство (102), выполненное с возможностью перемещения вдоль назначенного маршрута (106) внутри области (107), в которой производится мониторинг, и по меньшей мере один внешний измерительный модуль (206), который может быть соединен с указанным транспортным средством(102), при этом указанная многофункциональная подводная станция (101) содержит- по меньшей мере одну загрузочную область(204), выполненную с возможностью приема указанного транспортного средства (102)- по меньшей мере одну интерфейсную систему(220), выполненную с возможностью осуществления связи с указанным загруженным транспортным средством (102)- по меньшей мере одну систему (207) оснащения,выполненную с возможностью оснащения указанного загруженного транспортного средства (102) указанным измерительным модулем(206) и содержащую по меньшей мере одну область(208) временного хранения, выполненную с возможностью хранения указанного модуля (206), и- по меньшей мере одну управляющую систему(201), предназначенную для управления функциями указанной станции (101). 27 2. Автономная подводная система (100) по п.1, в которой указанное автономное модульное подводное транспортное средство (102) исследует указанную область (107), где производится мониторинг, проходя по назначенному маршруту(106) согласно траекториям,заранее запрограммированным или автономно вычисленным указанным транспортным средством. 3. Автономная подводная система (100) по любому из предыдущих пунктов, в которой указанное автономное модульное подводное транспортное средство(102) проводит мониторинговые кампании в указанной области(107) мониторинга, осуществляет сбор данных о подводной окружающей среде и о целостности работающих в ней инфраструктур с помощью измерительных средств, установленных на борту транспортного средства (102), и/или с помощью указанного внешнего измерительного модуля (206). 4. Автономная подводная система (100) по п.1, в которой указанные внешние измерительные модули(206) содержатся в области (208) временного хранения, выполненной внутри конструкции (205),оснащенной электромеханическими средствами для соединения модулей (206) со станцией или отсоединения модулей (206) от станции. 5. Автономная подводная система (100) по п.1, в которой указанная многофункциональная подводная станция (101) содержит бортовые измерительные средства(202),которые могут быть фиксированными (209) или подвижными (213) и выполнены с возможностью измерения по меньшей мере одного из следующих параметров- концентрации растворенного кислорода и/или процента насыщения растворенным кислородом- давления звуковой волны и- биологической реакции живых организмов. 6. Автономная подводная система (100) по любому из предыдущих пунктов, в которой указанные фиксированные бортовые измерительные средства (209) полностью содержатся внутри конструкции (205) и включают по меньшей мере один датчик (214) и по меньшей мере один локальный управляющий блок (215), выполненный с возможностью управления всеми функциями датчиков. 7. Автономная подводная система (100) по п.6, в которой указанные подвижные бортовые 28 измерительные средства (213) отличаются от фиксированных бортовых измерительных средств(209) тем, что они могут перемещаться от станции(217),содержащему внутри себя по меньшей мере один датчик, и кабелю (218), который предотвращает его отсоединение от указанной станции (101). 8. Автономная подводная система (100) по любому из предыдущих пунктов, в которой указанная управляющая система (201) соединена с конструкцией (104), расположенной на поверхности,посредством по меньшей мере одного составного кабеля (211), который обеспечивает передачу данных и/или подачу энергии в многофункциональную подводную станцию (101). 9. Автономная подводная система (100) по п.1, в которой прием транспортного средства (102) в загрузочную область (204) и выход из нее транспортного средства (102) обеспечиваются соответствующими направляющими устройствами,выбранными из следующего акустические системы позиционирования,видеокамеры,средства освещения, датчики (219) расстояния, воронки. 10. Автономная подводная система (100) по любому из предыдущих пунктов, в которой, когда автономное модульное подводное транспортное средство (102) находится в загрузочной области(204), указанная интерфейсная система (220) станции позволяет выполнять по меньшей мере одну из следующих операций- передачу данных между транспортным средством (102) и станцией (101)- зарядку аккумуляторов (312) транспортного средства (102). 11. Автономная подводная система (100) по п.10,в которой указанная интерфейсная система (220) содержит средства прямого соединения, такие как соединительные гнезда или контактные элементы. 12. Автономная подводная система (100) по п.10,в которой указанная интерфейсная система (220) между станцией (101) и транспортным средством(102) содержит средства беспроводной связи. 13. Автономное модульное подводное транспортное средство(102),оснащенное бортовыми измерительными датчиками (311) и содержащее по меньшей мере один главный движитель (302), по меньшей мере один вспомогательный движитель (305, 306, 307) для точного позиционирования, корпус (301), по меньшей мере один электронный управляющий модуль (313), по меньшей мере один накопитель(312) энергии и по меньшей мере одну соединительную систему (308), отличающееся тем,что оно содержит меньшей мере один внешний измерительный модуль (206), оснащенный по меньшей мере одним измерительным датчиком(317), обеспечивающие сцепление внешнего измерительного модуля (206) с подводным транспортным средством (102). 14. Автономное модульное подводное транспортное средство (102) по п.13, в котором указанные главные движители (302) и движители(305, 306, 307) для точного позиционирования имеют винт и приводятся в действие по меньшей мере одним электродвигателем(310),расположенным внутри указанного корпуса (301). 15. Автономное модульное подводное транспортное средство (102) по п.13, в котором указанный корпус (301) выполнен из нержавеющего композитного материала. 16. Автономное модульное подводное транспортное средство (102) по п.13, в котором электронный управляющий модуль (313) и накопитель (312) энергии размещены в одном или более водонепроницаемых контейнерах (309),выполненных из титана и способных выдерживать давление до 300 бар. 17. Автономное модульное подводное транспортное средство (102) по п.13, в котором указанные бортовые измерительные датчики (311) выполняют измерения по меньшей мере одного из следующих параметров- концентрации растворенного кислорода и/или процента насыщения растворенным кислородом- концентрации растворенных газов и- концентрации углеводородов. 18. Автономное модульное подводное транспортное средство (102) по п.13, в котором указанные бортовые измерительные датчики (311),расположенные в указанном корпусе (301),взаимодействуют с морской окружающей средой посредством по меньшей мере одного отверстия(304) в указанном корпусе (301). 19. Автономное модульное подводное транспортное средство (102) по п.13, которое содержит средства связи с внешним измерительным модулем (206), обеспечивающие двунаправленный обмен информацией для синхронизации данных,собранных различными датчиками. 20. Автономное модульное подводное транспортное средство (102) по п.13, которое содержит соединительную систему(308),выполненную с возможностью взаимодействия с интерфейсной системой (220) для осуществления связи между транспортным средством (102) и подводной станцией (101). 21. Автономное модульное подводное транспортное средство (102) по п.13, в котором указанный корпус (301) имеет уплощенную форму с плоской нижней поверхностью для облегчения(102) на многофункциональную подводную станцию (101) или морское дно. 22. Автономное модульное подводное транспортное средство (102) по п.13, в котором внешний измерительный модуль (206), оснащенный измерительными датчиками (314), содержит соединительные средства(206) с системой (207) оснащения в подводной многофункциональной станции (101) или с транспортным средством (102)(311) указанного транспортного средства (102)- управляющий блок (316) для управления функционированием измерительных датчиков (314),регулировкой и распределением подачи энергии и взаимодействием с транспортным средством (102). 23. Автономное модульное подводное транспортное средство (102) по п.22, в котором указанный внешний измерительный модуль (206) содержит по меньшей мере внутренний источник(315) энергии. 24. Автономное модульное подводное транспортное средство (102) по п.22, в котором управляющий блок (316) и источник (315) энергии заключены по меньшей мере в один водонепроницаемый контейнер (321), выполненный из титана и расположенный в указанном корпусе(318). 25. Автономное модульное подводное транспортное средство (102) по п.23, в котором указанный корпус (318) выполнен из композитного материала или другого материала. 26. Автономное модульное подводное транспортное средство (102) по п.13, в котором указанный измерительный датчик(314),установленный в указанном внешнем измерительном модуле (206), выбран из следующих типов датчиков- автоматический анализатор металлических микроэлементов и- автоматический анализатор питательных веществ.
МПК / Метки
МПК: B63C 11/52
Метки: окружающей, мониторинга, система, автономная, подводная, среды, четырехмерного
Код ссылки
<a href="https://kz.patents.su/30-30384-avtonomnaya-podvodnaya-sistema-dlya-chetyrehmernogo-monitoringa-okruzhayushhejj-sredy.html" rel="bookmark" title="База патентов Казахстана">Автономная подводная система для четырехмерного мониторинга окружающей среды</a>
Способ мониторинга техногенного загрязнения окружающей среды на основе биоиндикации
Номер инновационного патента: 26832
Опубликовано: 15.05.2013
Авторы: Бадаев Ерикжан Агыбаевич, Камбулин Владимир Евгеньевич, Динасилов Алмат Саламатович, Болтаев Марат Даниярович
МПК: A01G 23/00, G01N 33/00
Метки: среды, биоиндикации, способ, основе, загрязнения, мониторинга, окружающей, техногенного
Формула / Реферат:
Изобретение относится к области экологии и предназначено для исследования и анализа антропагенного загрязнения экосистем по состоянию хорошо определяемых визуально и широко распространенных тест-объектов и тест-систем. Способ мониторинга техногенного загрязнения окружающей среды на основе биоиндикации включает определение уровня техногенного воздействия в объектах окружающей среды (почва, растения и вода) и биоиндикаторах-имаго саранчовых...
Система индивидуального учета загрязнений окружающей среды, производимых техногенными объектами
Номер инновационного патента: 29649
Опубликовано: 16.03.2015
Авторы: Айтимов Мурат Жолдасбекович, Ахметов Бахытжан Сражатдинович, Бейсембекова Роза Нуралиевна, Харитонов Петр Тихонович, Аналиева Ажар Уразбаевна
МПК: G08C 19/00
Метки: учета, техногенными, индивидуального, загрязнений, объектами, среды, производимых, система, окружающей
Формула / Реферат:
Система индивидуального учета загрязнений окружающей среды, производим ых техноген н ым и объектам и.Изобретение относится к информационно - измерительным системам для контроля загрязнения окружающей среды техногенными объектами. Задача изобретения обеспечение интегрального учета загрязнений окружающей среды в My л ьти объе кто во м режиме контроля, а гак же возможность установки передающих сторон на подвижных техногенных объектах. Это решается...
Автономная система очистки жидкостей
Номер предварительного патента: 11709
Опубликовано: 15.07.2002
Автор: Нуртаева Алия Камидолловна
МПК: B01D 37/00, C02F 1/00
Метки: система, очистки, автономная, жидкостей
Формула / Реферат:
Изобретение может быть использовано в химической технологии для очистки жидкостей при отсутствии источников энергии (электричества и т. д.) для подачи жидкостей, например для получения питьевой воды.Достигаемый технический результат изобрете-ния - обеспечение автономности работы системы, возможность очистки агрессивных, летучих, ядовитых и т. ï. æèäêîñòåé, возможность контроля за скоростью очистки, а также повышение степени очистки.Предлагаемая...
Автономная компьютерная система
Номер патента: 21751
Опубликовано: 15.10.2009
Автор: Ахметбеков Серик Маркенович
МПК: H04M 1/00, H04B 1/00, H04M 1/03...
Метки: автономная, система, компьютерная
Формула / Реферат:
Изобретение относится к электронной промышленности и приборостроению, а, именно, к автономным компьютерным системам в сочетании с техникой кондиционирования воздуха и может быть использовано как познавательно-информационное средство в развивающих целях и одновременно как общеукрепляющее средство в лечебных целях.Задача изобретения - создание автономной компьютерной системы с обеспечением кондиционирования воздуха.Изобретение представляет собой...
Система для мониторинга группировки спутников системы позиционирования
Номер патента: 28408
Опубликовано: 15.04.2014
Авторы: ЛЕНЕ, Робер
МПК: G01S 1/00
Метки: системы, система, спутников, мониторинга, группировки, позиционирования
Текст:
...о содержит- средство (24) для удаленного управления каждым спутником (2) мониторинга и- средство (25) для вычисления параметров орбит каждого спутника (2) мониторинга и для обновления блоков (11) обработки на борту каждого спутника (2) мониторинга. 10. Система мониторинга по п.1, в которой упомянутый центр(5) распространения дополнительно содержит средство (28) кодирования для кодирования сообщений о целостности перед их отправкой...
Предыдущий патент: Препарат для лечения и профилактики дерматомикозов животных
Следующий патент: Огнестойкая гипсовая панель с низкой массой и плотностью
Случайный патент: Способ восстановления состоящего из частиц оксисодержащего материала и установка для осуществления этого способа