Компьютерный способ обработки сейсмических данных, устройство для его осуществления и программный продукт
Текст
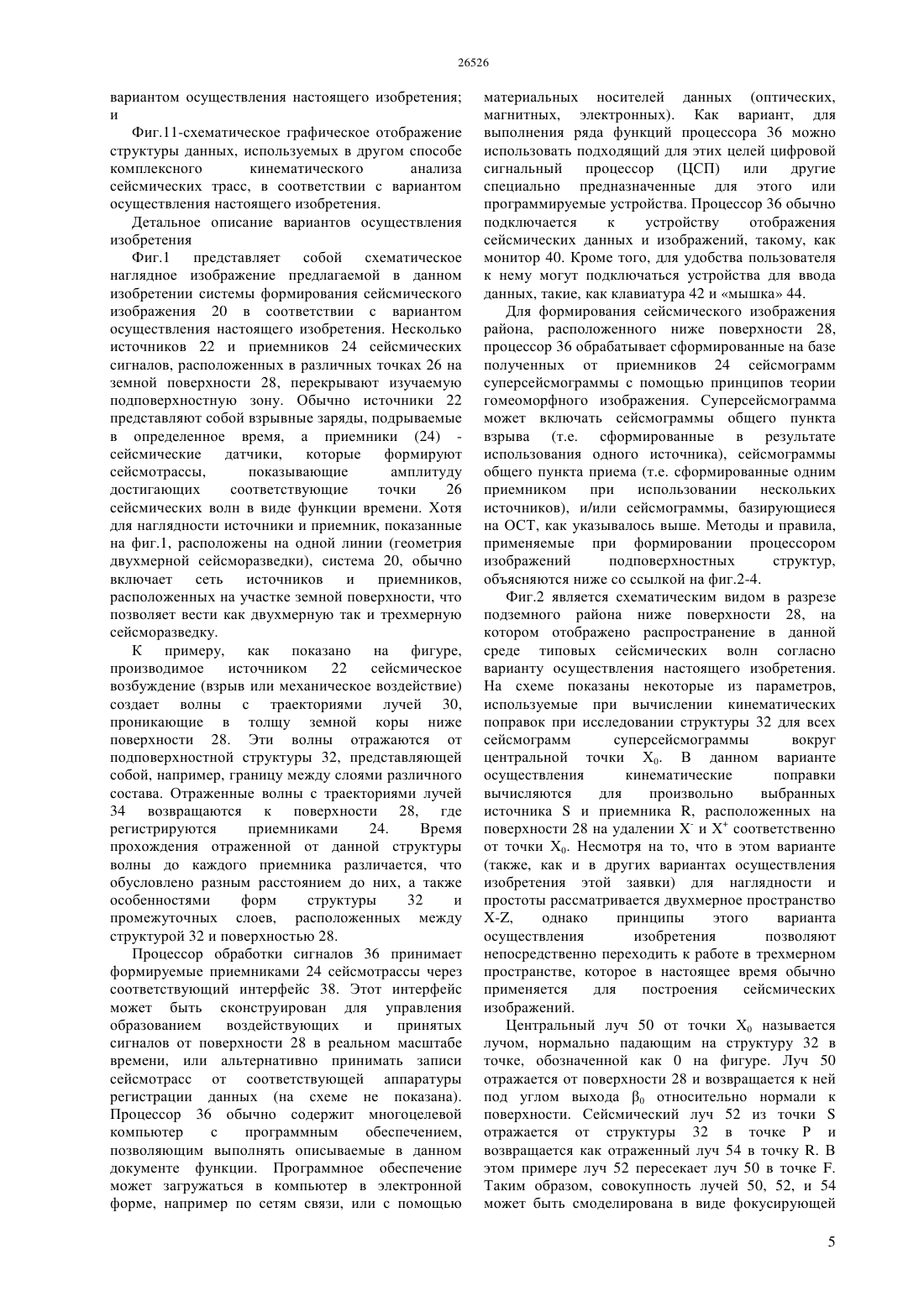
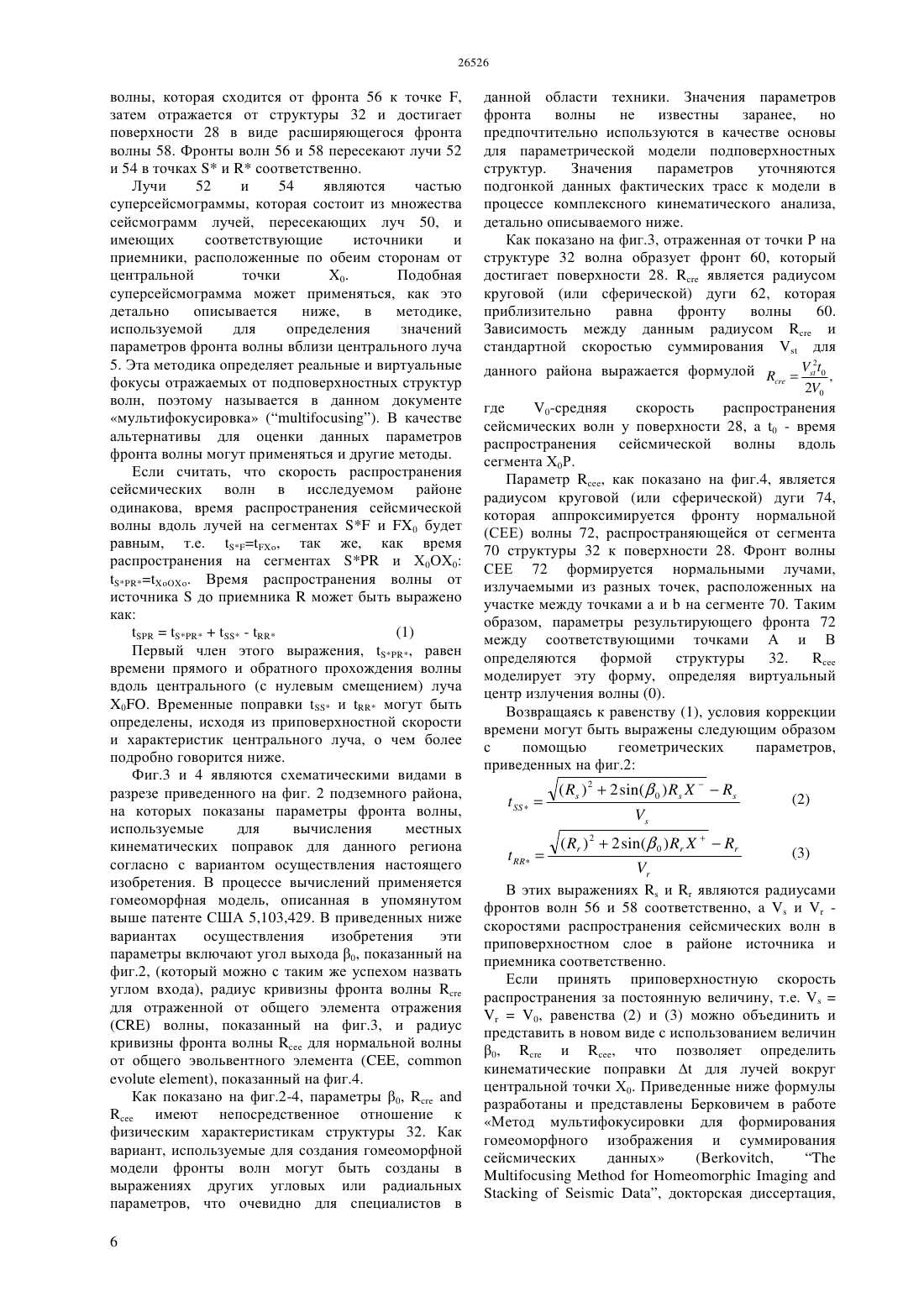
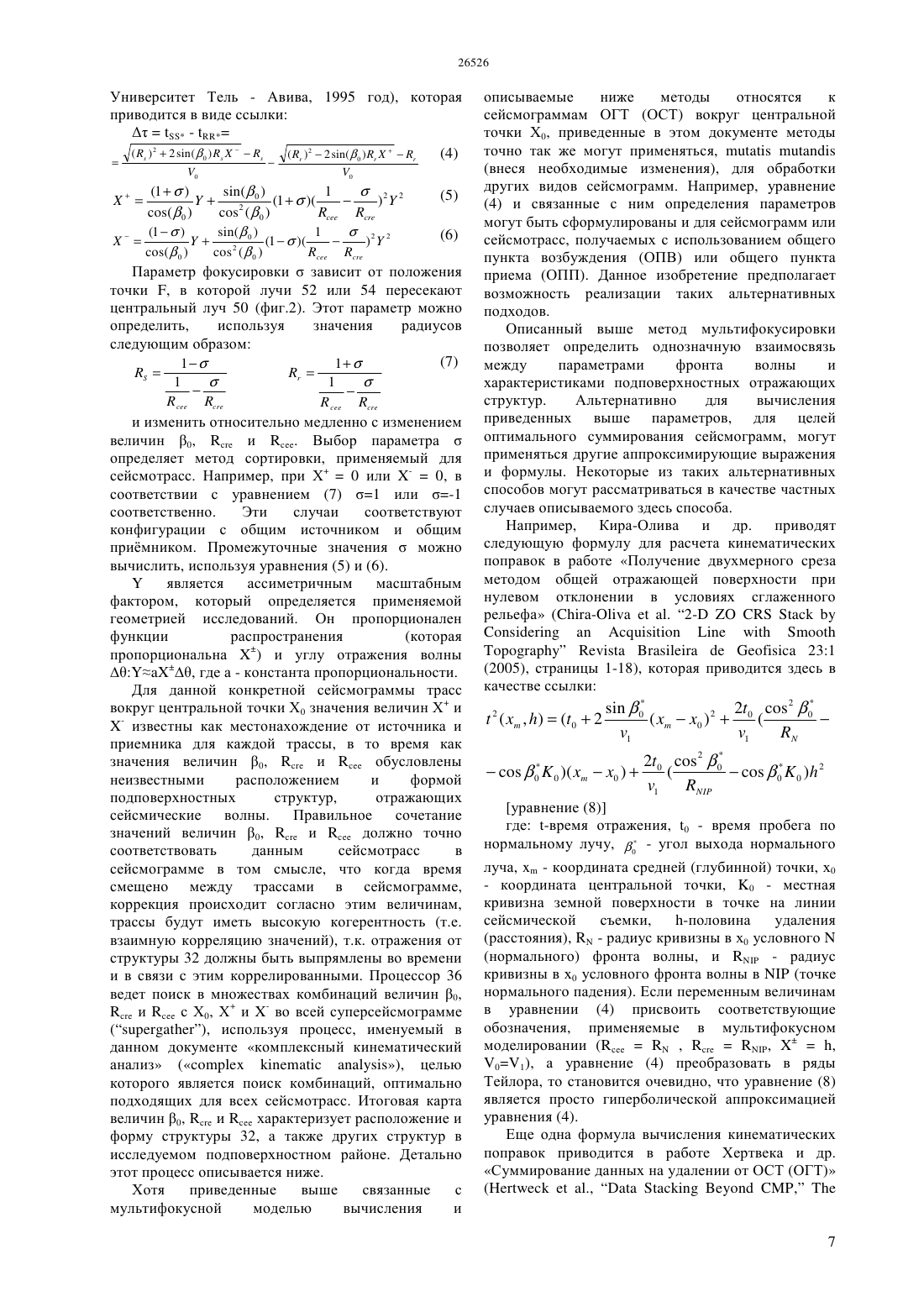
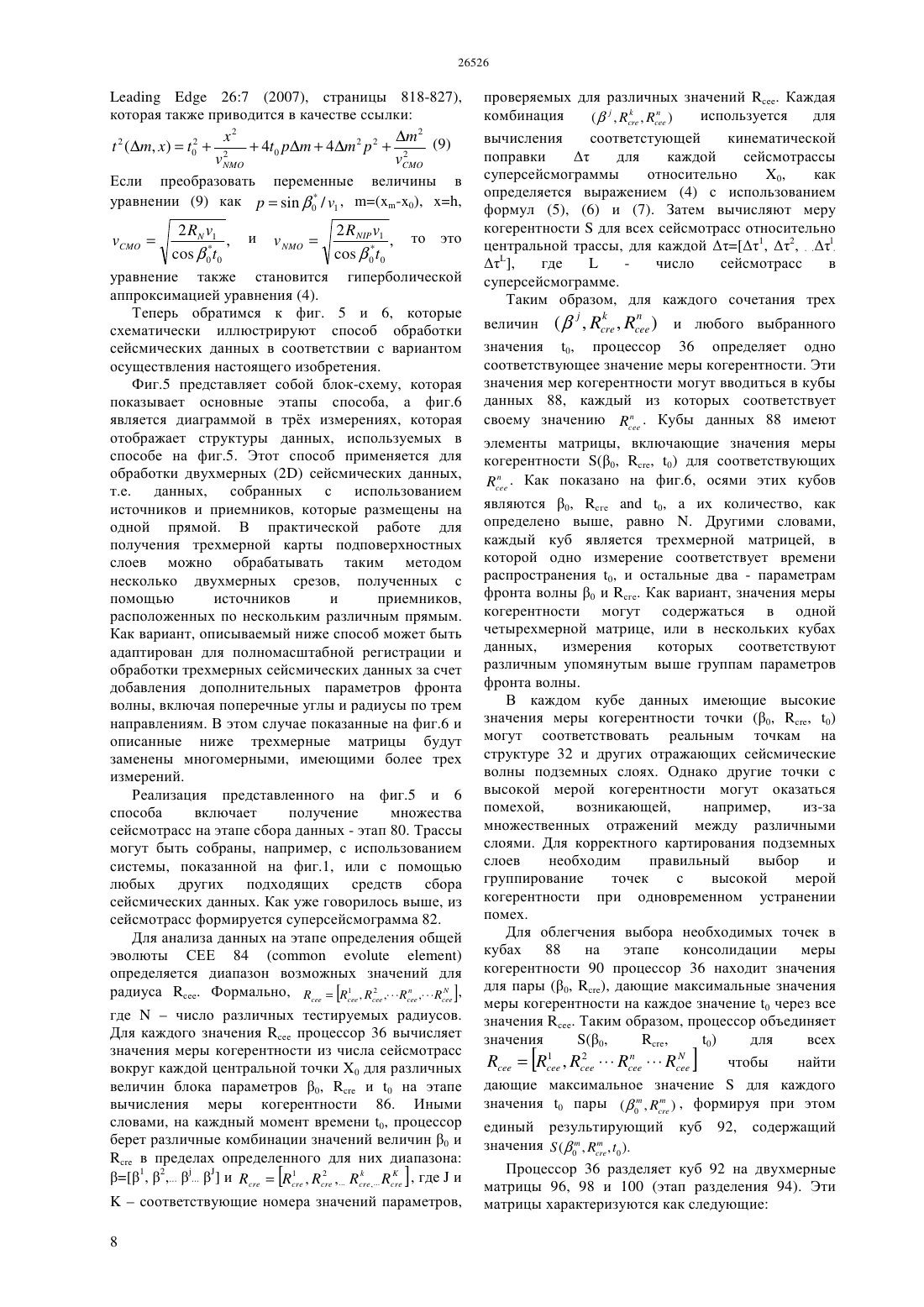
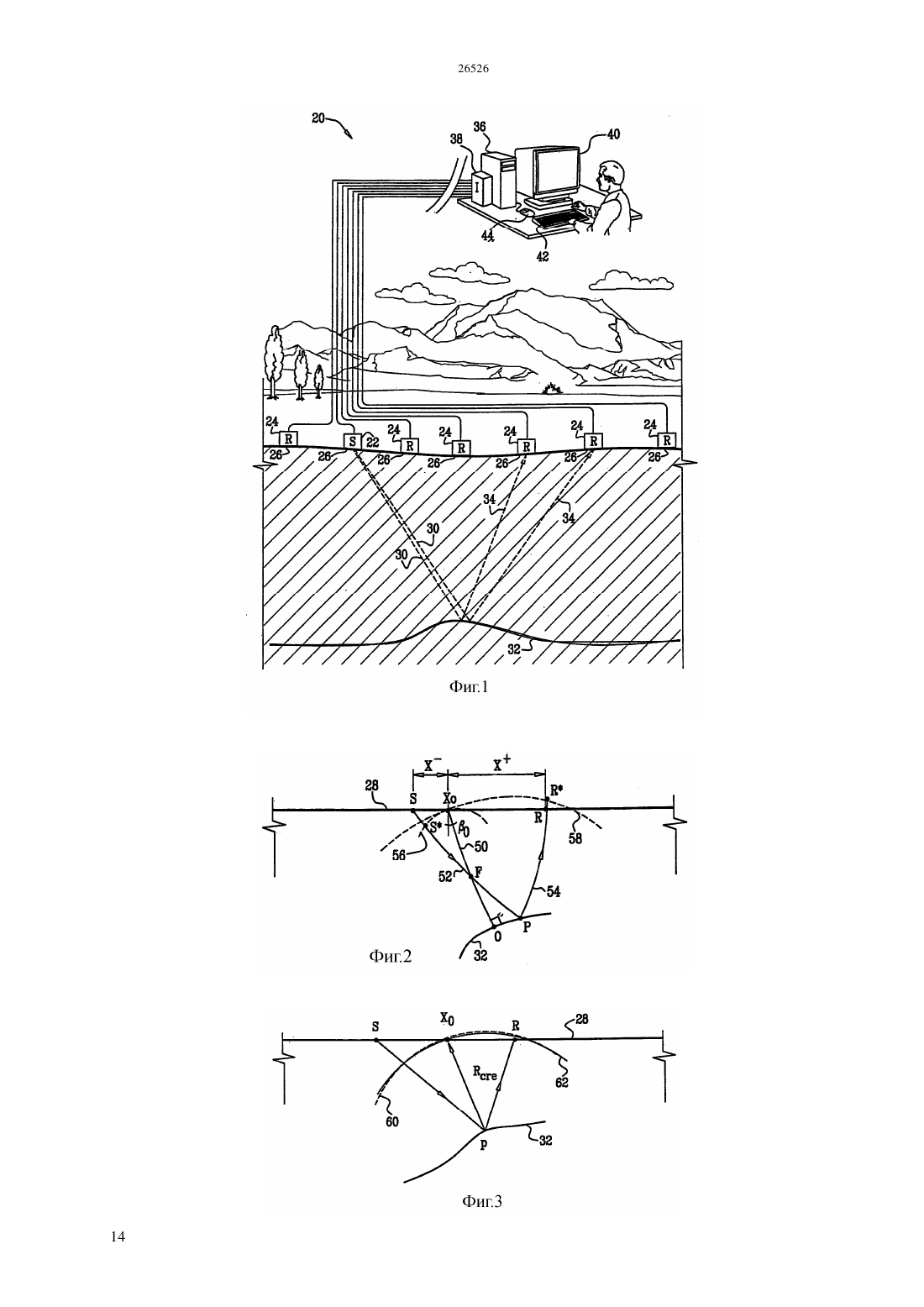
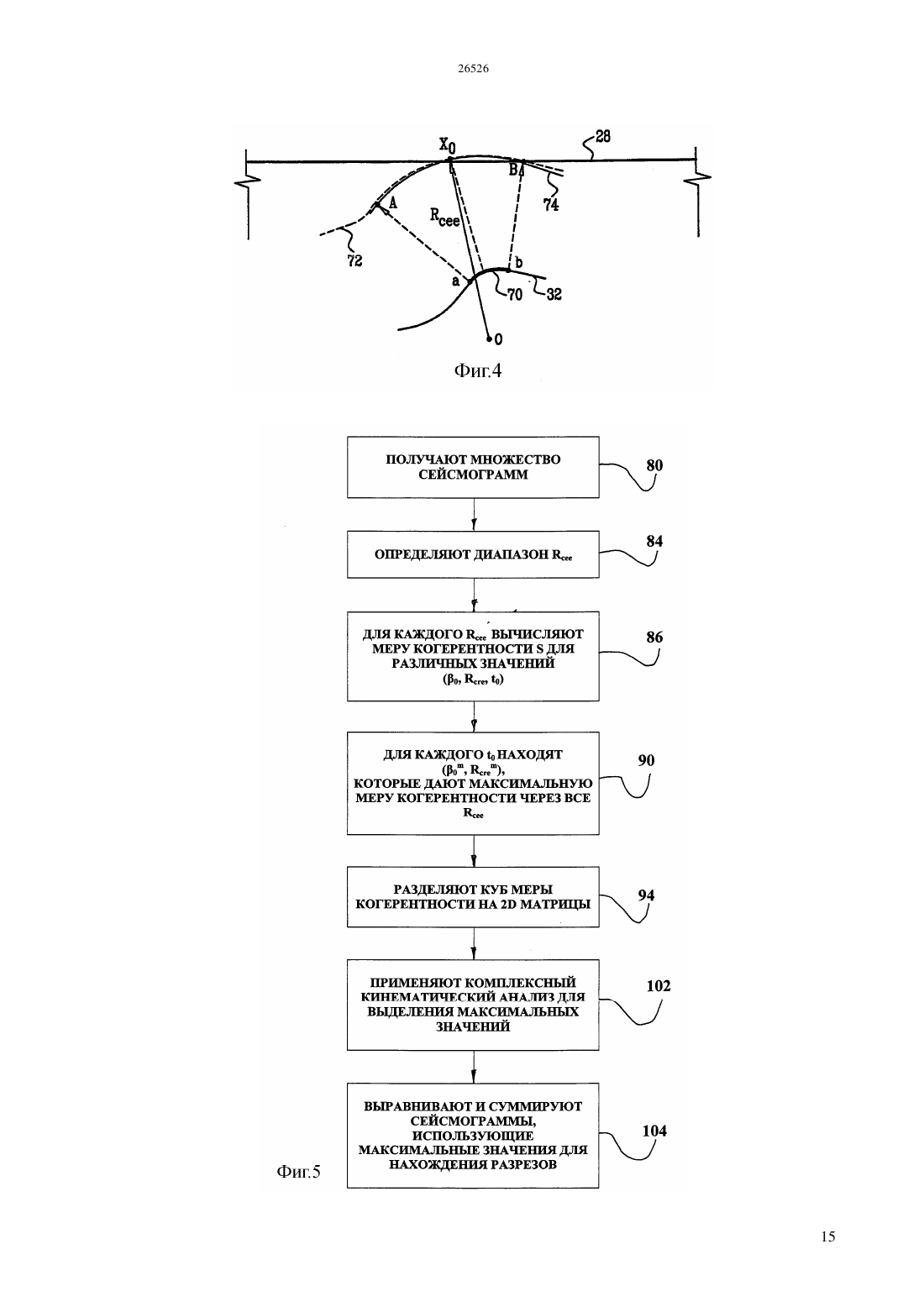
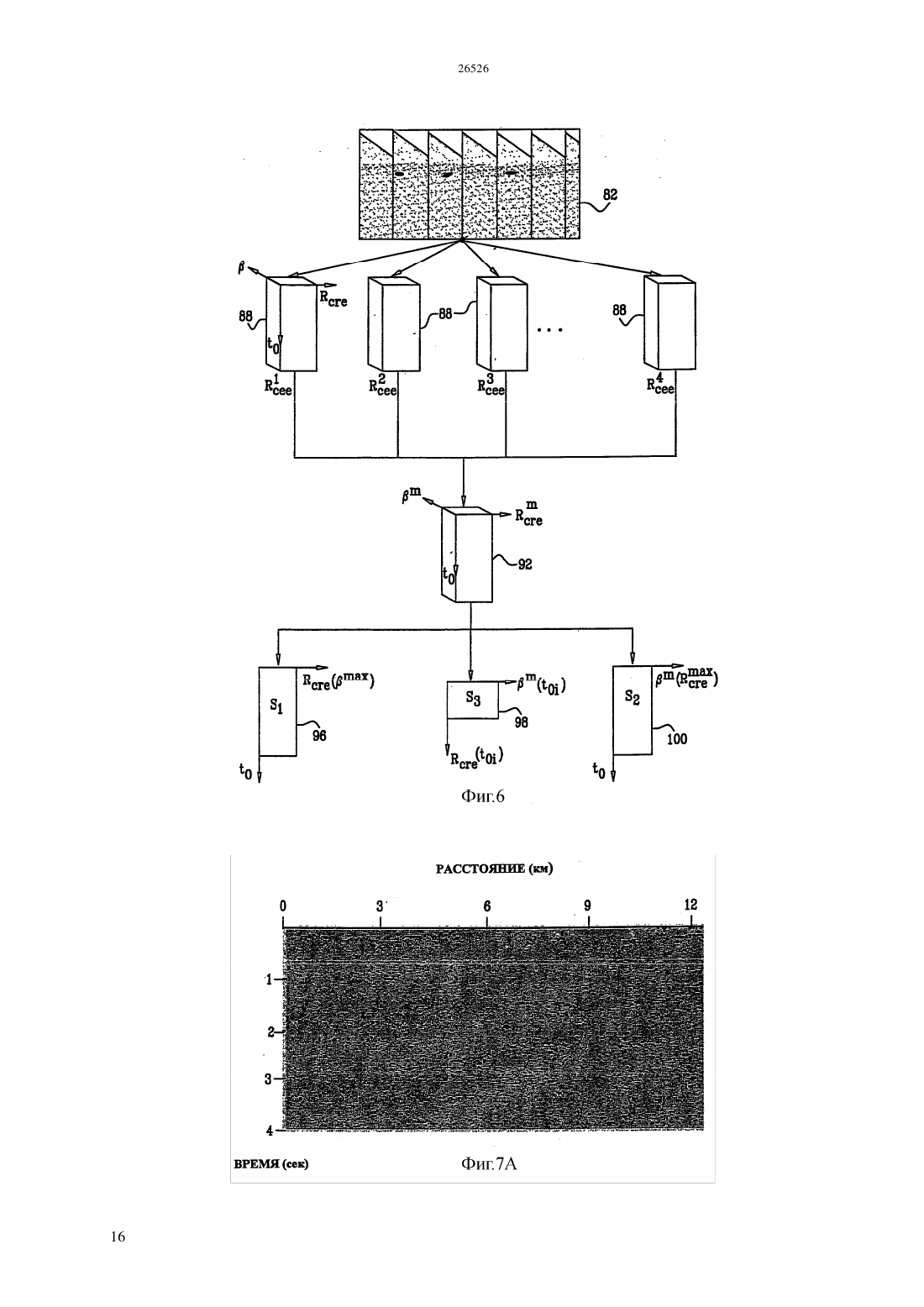
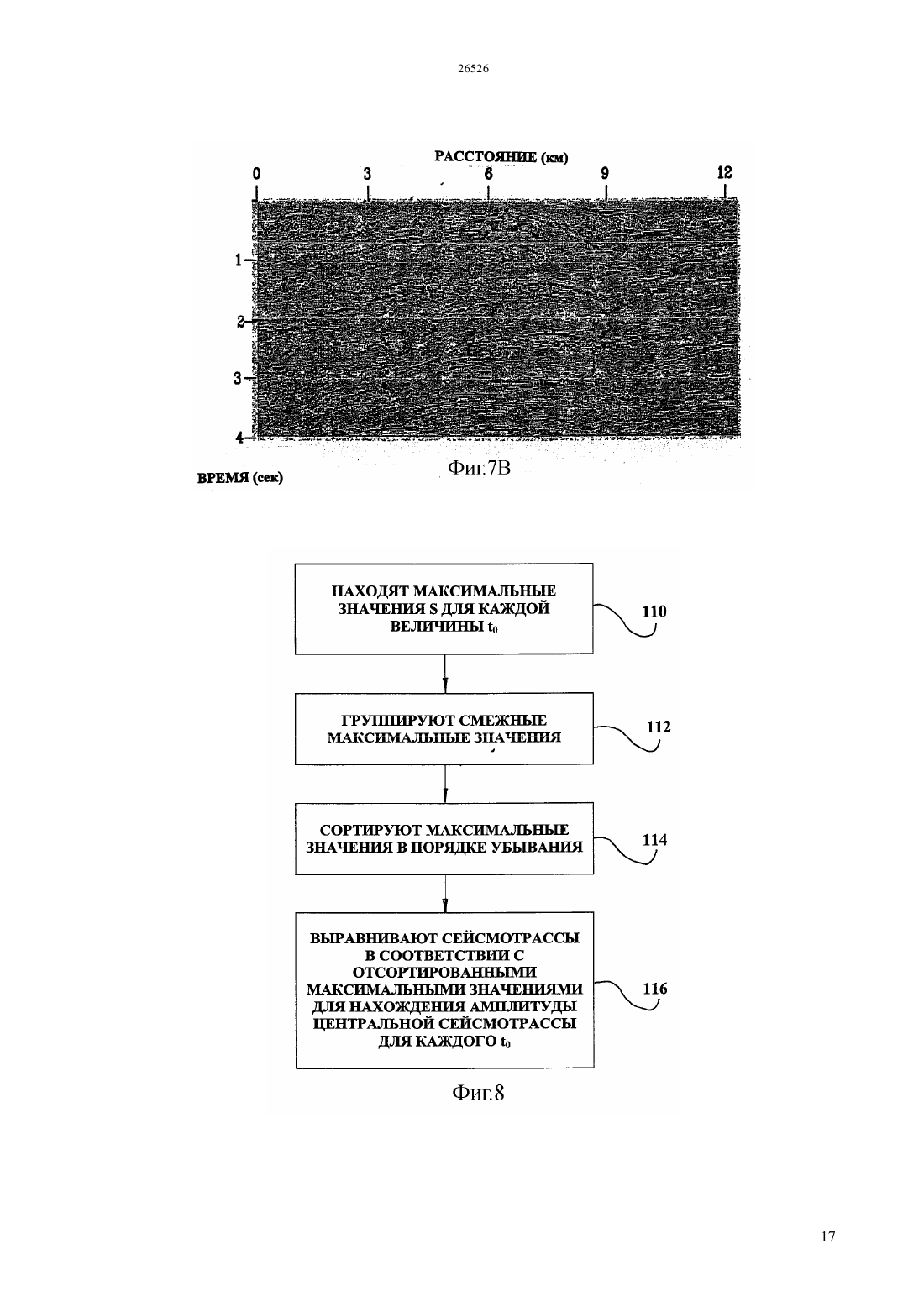
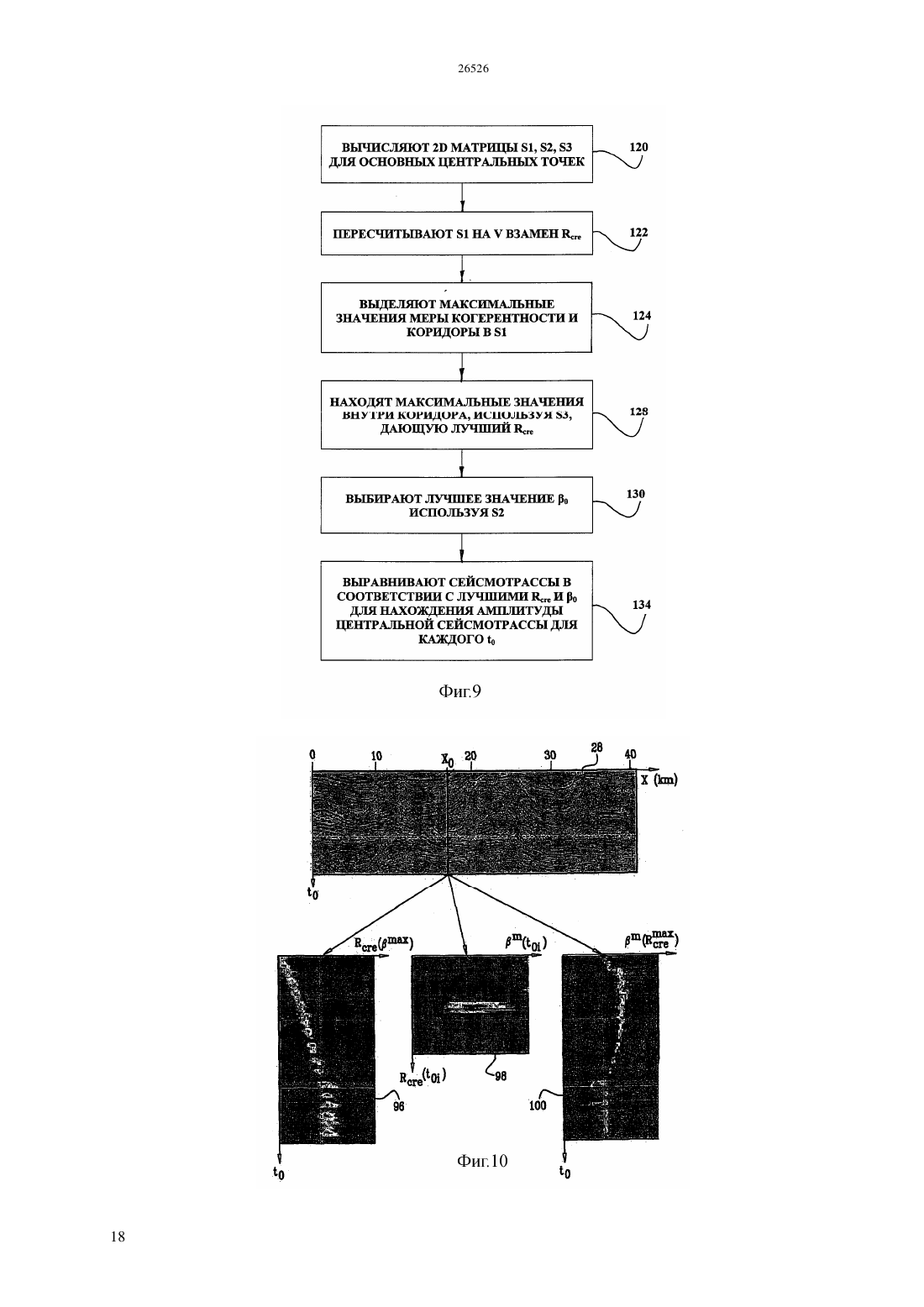
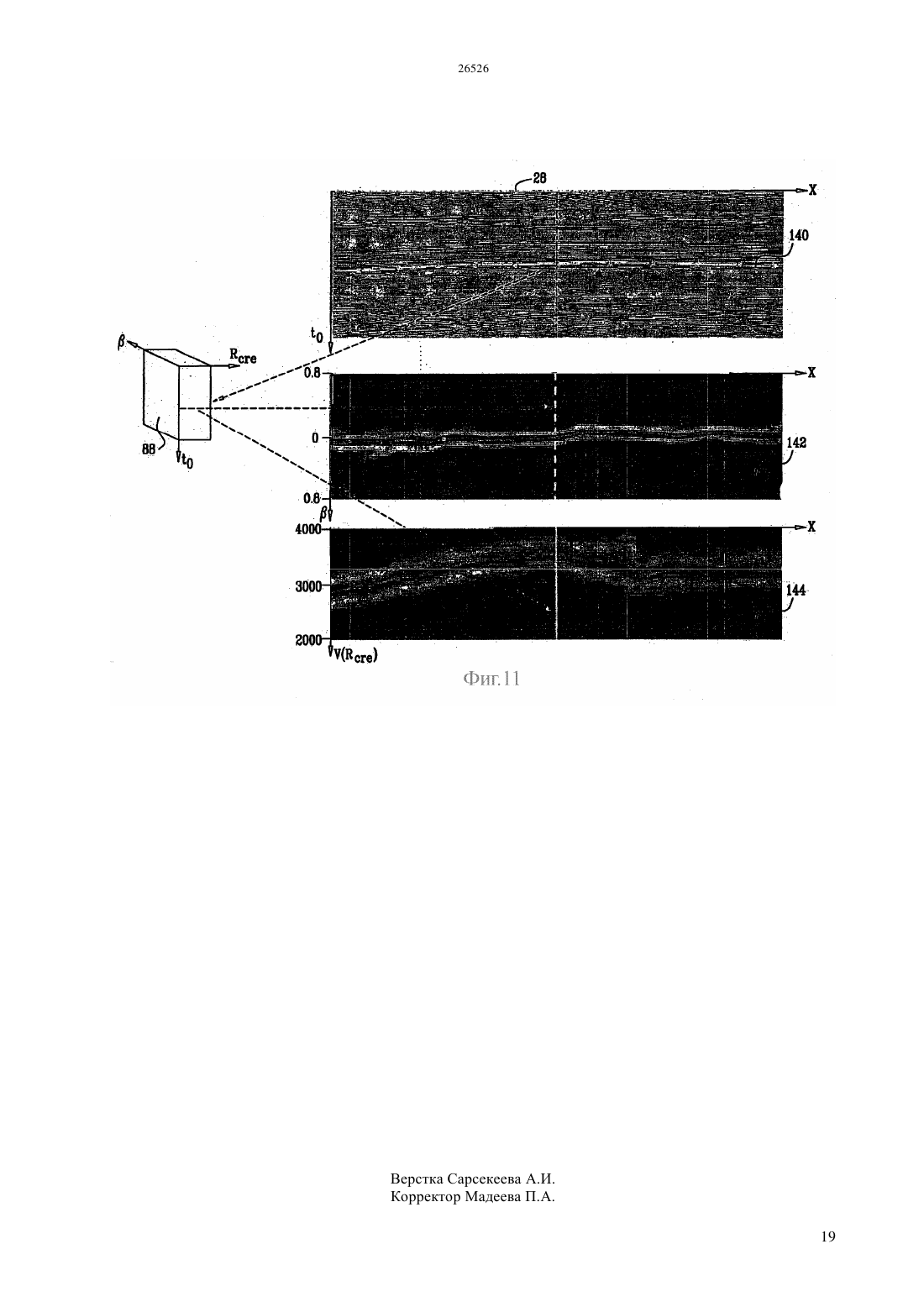
(51) 01 1/28 (2010.01) 01 1/36 (2010.01) 01 1/20 (2010.01) 01 1/00 (2010.01) КОМИТЕТ ПО ПРАВАМ ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ МИНИСТЕРСТВА ЮСТИЦИИ РЕСПУБЛИКИ КАЗАХСТАН(57) Предполагающий использование компьютера для обработки данных способ включает получение массива сейсмических трасс, соответствующих сигналам, полученным за определенный период времени от множества точек в результате отражения сейсмических волн от подповерхностных структур. Меру корреляции для трасс вычисляют в виде функции блока параметров фронта волны, которые определяют соответствующие кинематические поправки, введенные для выравнивания трасс. Матрицу, имеющую, по меньшей мере, три элемента, формируют так, что элементы матрицы включают вычисленную меру корреляции. С помощью матрицы в автоматическом или интерактивном режиме идентифицируют значения параметров фронта волны по оси времени или по выбранным горизонтам для максимизации меры корреляции, и путем выравнивания и суммирования сейсмотрасс с использованием кинематических поправок,обусловленных определенными значениями параметров фронта волны, формируют сейсмическое изображение подповерхностных структур.(74) Болотов Юрий Альбертович Кульжамбекова Сауле Даниаровна Шатрова Елена Геннадьевна Бутабаева Джаннета Жалоловна(54) КОМПЬЮТЕРНЫЙ СПОСОБ ОБРАБОТКИ СЕЙСМИЧЕСКИХ ДАННЫХ,УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И ПРОГРАММНЫЙ ПРОДУКТ Настоящее изобретение относится в целом к анализу структуры среды, в частности, к обработке сейсмических данных для анализа подземных структур. Способы построения сейсмических изображений(сейсмограмм, разрезов и др.), известные из уровня техники, используют комплекс сейсмических источников и сейсмоприемников, позволяющих получать необходимые данные, касающиеся подповерхностных (т.е. подземных) структур. После сейсмического воздействия (такого, как взрыв или механический удар) определенной силы, каждый приемник формирует сейсмическую трассу, т.е. запись сейсмического сигнала, зарегистрированную приемником, как зависимость от времени, в результате отражения возбуждающей волны от подповерхностных слоев находящихся ниже группы источников и примников. Трассы от множества приемников, полученные в результате возбуждения у источников в различных местах, обрабатываются совместно для создания картины строения подповерхностных слоев. Как часть процесса построения изображения для возрастания соотношения сигнал/помеха множество сейсмотрасс от каждой пары источник/приемник,окружающих общую среднюю точку (ОСТ) или общую глубинную точку (ОГТ), согласуются по времени и затем суммируются. (Такая совокупность трасс обычно называется сейсмограммой, а процесс выравнивания и суммирования трасс известен как способ нормальной кинематической поправки ( , ) и суммирования трасс). Выравнивание проводится в связи с необходимостью учета разницы времени прохождения сейсмических волн в различных парах источник/приемник. Зависимость времени прохождения волны представляет собой гиперболу,являющуюся функцией расстояния между источником и приемником и времени перемещения,которая применяется для выравнивания трасс в порядке компенсации этой гиперболической зависимости, вычисляемой по простой формуле,включающей расстояние между источником и приемником и скорость распространения волн в данной среде. Однако известно,что гиперболическая кинематическая поправка неточно отражает реальные характеристики подповерхностных структур и е использование приводит к потере информации. В связи с этим был предложен ряд альтернативных подходов к решению проблемы выравнивания поправок между сейсмограммами трасс. Например патент США 5,103,429, который приводится в качестве ссылки, описывает способ анализа таких структур с использованием гомеоморфного изображения. (При гомеоморфном изображении каждый элемент отображаемого объекта однозначно переносится на отображение, в результате чего отображаемый объект и его отображение являются топологически идентичными). Такой способ позволяет суммировать различные данные и формировать соответствующие изображения без ухудшения разрешающей способности. Сущность изобретения Приведенные ниже варианты осуществления настоящего изобретения предполагают применение принципов теории гомеоморфного изображения при обработке группы сейсмограмм из сейсмических сигнальных сейсмотрасс, именуемой в дальнейшем суперсейсмограмма. Процесс комплексного кинематического анализа,основанный на параметризации фронтов волн,распространяющихся в подповерхностной среде,позволяет определять кинематические поправки в реальном масштабе времени. Суммирование сейсмотрасс с учетом этих кинематических поправок позволяет формировать сейсмическое изображение среды более детально и точно, чем уже известные методы. Описываемые ниже методы не только повышают соотношение сигнал/помеха в сейсмических изображениях подповерхностной структуры, но и позволяют учитывать такие факторы, как изменения скорости распространения как в глубокозалегающих, так и в малоглубинных участках, а также кривизну отражающих волны подповерхностных слоев. Кроме того, при их применении не возникает эффектов растяжения сейсмических сигналов , к которым приводит использование существующих методов ввода кинематических поправок. Хотя описываемые ниже примеры осуществления изобретения касаются обработки сейсмических данных и формирования сейсмического изображения подповерхностных структур, разработанные в данном изобретении принципы могут быть также использованы при формировании изображений в других неоднородных средах. Таким образом, в соответствии с предлагаемым вариантом осуществления настоящее изобретение предоставляет компьютерный способ обработки данных, с использованием вычислительной техники,включающий прим массива сейсмических трасс,соответствующих сигналам,полученным за определенный период времени от множества точек в результате отражения сейсмических волн от подповерхностных структур- вычисление меры корреляции для трасс в виде функции блока параметров фронта волны, которые определяют соответствующие кинематические поправки, введенные для выравнивания трасс- формирование матрицы, имеющей, по меньшей мере, три элемента, из которых один элемент соответствует времени распространения сейсмических волн, и, по меньшей мере, два элемента соответствуют, по меньшей мере, двум параметрам фронта волны соответственно, и элементы матрицы включают вычисленную меру корреляции- идентификация с использованием матрицы значений параметров фронта волны, которые обеспечивают максимальную меру корреляции для каждого из множества значений времен распространения соответственно и- формирование сейсмического изображения подповерхностных структур путем выравнивания и суммирования сейсмотрасс, с использованием кинематических поправок,которые были определены как идентификационные значения параметров фронта волны. В приведенном варианте осуществления изобретения получение массива сейсмотрасс включает получение суперсейсмограммы,включающей множество сейсмограмм трасс,имеющих соответственно различные источники и приемники, расположенные по двухмерной или трехмерной геометрии получения сигнала, а идентификация значений величин включает обработку меры корреляции, вычисленной для множества сейсмограмм для идентификации значений параметров фронта волны, которые обеспечивают максимальную меру корреляции. В основном, получение суперсейсмограммы включает выбор множества сейсмограмм, каждая из которых состоит из соответствующего массива сейсмотрасс,полученных с помощью использующих различную геометрию получения сигнала источников и приемников, а формирование сейсмического изображения подповерхностных структур включает обработку с помощью компьютера соответствующих сейсмических изображений в двух или в трх измерениях соответствующих сейсмотрасс. Характерно, что кинематические поправки определяют аппроксимацией, выбираемой из группы аппроксимаций,состоящей из гиперболических,негиперболических и параболических аппроксимаций. При некоторых вариантах осуществления изобретения, по меньшей мере, два параметра фронта волны включают угловой параметр и, по меньшей мере, один радиус кривизны фронта волны, отходящий от отражающей поверхности подземного слоя. В одном из вариантов изобретения угловой параметр включает угол выхода, и, по меньшей мере,один радиус кривизны включает соответствующие радиусы общего отраженного элемента и общего эволютного элемента фронтов волн. В основном идентификация значений величин включает формирование множества многомерных матриц, каждая из которых включает, по меньшей мере, три элемента и содержит вычисленную меру корреляции для различных соответствующих значений радиуса общего эволютного элемента, и объединение множества многомерных матриц для формирования результирующей многомерной матрицы, для которой, по меньшей мере, два элемента включают первый элемент,соответствующий углу выхода, и второй элемент,соответствующий радиусу общего отраженного элемента. В предлагаемом варианте осуществления изобретения объединение множества многомерных матриц включает ввод в элементы результирующей многомерной матрицы, вычисленной компьютером меры корреляции, которая является максимальной по отношению к соответствующим элементам в множестве многомерных матриц. В дополнение к этому или в качестве альтернативы идентификация значений величин включает разрезание результирующей многомерной матрицы для получения множества двухмерных матриц, и выявления максимального значения вычисленной меры корреляции в двухмерных матрицах. Данный вариант осуществления предполагает,что, по меньшей мере, два параметра фронта волны включают в себя угловой параметр и, по меньшей мере, один параметр кривизны фронта волны и параметр скорости. В некоторых вариантах осуществления изобретения идентификация значений величин включает выявление одного или более соответствующих максимальных значений вычисленной меры корреляции для каждого времени распространения,а выравнивание сейсмотрасс включает в себя выравнивание сейсмотрасс в соответствии со значениями параметров фронта волны, представляющих собой соответствующие максимальные значения. Выявление одного или более соответствующих максимальных значений включает сортировку максимальных значений в порядке, определяемым вычисленной мерой корреляции на каждом максимальном значении. В дополнение к этому или в качестве альтернативы выявление одного или более соответствующих максимальных значений включает группировку максимальных значений для каждого из тех времен распространения, для которых соответствующие величины значений параметров фронта волны различаются не более, чем на предварительно заданную пороговую величину, как соответствующие одной волне при этом идентифицируя максимальные значения, для которых значения параметров фронта волны отличаются более чем на установленную пороговую величину, как соответствующие разным волнам, и выравнивание сейсмотрасс включает выравнивание сейсмотрасс в соответствии со значениями параметров фронта волны, по меньшей мере одной из разных волн. В некоторых вариантах осуществления изобретения идентификация значений величин включает отображение на дисплее данных,показывающих вычисленную меру корреляции в виде функции времени распространения и, по меньшей мере, одного из параметров фронта волны,и ввод данных пользователем,который идентифицирует один или более максимальных значений вычисленной меры корреляции. Характерно, что получение введенных данных включает получение выбранного пользователем коридора значений, содержащего множество максимальных значений различных времн распространения и соответствующие значения, по меньшей мере, одного из параметров фронта волны,3 причм максимальные значения величин в коридоре соответствуют волнам,отражаемым от соответствующих последовательных подземных слоев. Еще один вариант осуществления изобретения включает определение пространственного горизонта в районе, для которого формируется сейсмическое изображение, и идентификацию с использованием матрицы значений параметров фронта волны,приводящих к максимальному значению корреляции для каждого из множества местоположений по пространственному горизонту соответственно. Предусмотрено в соответствии с воплощением настоящего изобретения устройство для обработки данных, содержащее интерфейс, который объединяет получение массива сейсмических трасс, соответствующих сигналам, полученным за определенный период времени от множества точек в результате отражения сейсмических волн от подповерхностных структур и процессор обработки сигналов,который сконфигурирован с возможностью- вычисления меры корреляции для трасс в виде функции блока параметров фронта волны, которые определяют соответствующие кинематические поправки, введенные для выравнивания трасс,формирования матрицы, имеющей, по меньшей мере, три элемента, из которых один элемент соответствует времени распространения сейсмических волн, и, по меньшей мере, два элемента соответствуют, по меньшей мере, двум параметрам фронта волны соответственно, и элементы матрицы включают вычисленную меру корреляции,- идентификации с использованием матрицы значений параметров фронта волны, которые обеспечивают максимальную меру корреляции для каждого из множества значений времен распространения соответственно и- формирования сейсмического изображения подповерхностных структур путем выравнивания и суммирования сейсмотрасс с использованием кинематических поправок,которые были определены как идентификационные значения параметров фронта волны. Дополнительно предусмотрен, в соответствии с осуществлением настоящего изобретения,программный продукт для компьютеров,содержащий машиночитаемый носитель, на котором команды управления программой сохранены и считывание которых компьютером обусловливает возможность компьютеру- получения массива сейсмических трасс,соответствующих сигналам,полученным за определенный период времени от множества точек в результате отражения сейсмических волн от подповерхностных структур,- вычисления меры корреляции для трасс в виде функции блока параметров фронта волны, которые определяют соответствующие кинематические поправки, введенные для выравнивания трасс, 4- формирования матрицы, имеющей, по меньшей мере, три элемента, из которых один элемент соответствует времени распространения сейсмических волн, и, по меньшей мере, два элемента соответствуют, по меньшей мере, двум параметрам фронта волны соответственно, и элементы матрицы включают вычисленную меру корреляции,- идентификации с использованием матрицы значений параметров фронта волны, которые обеспечивают максимальную меру корреляции для каждого из множества значений времен распространения соответственно и- формирования сейсмического изображения подповерхностных структур путем выравнивания и суммирования сейсмотрасс с использованием кинематических поправок,которые были определены как идентификационные значения параметров фронта волны. Настоящее изобретение будет более понятно из следующего ниже детального описания вариантов осуществления изобретения совместно с чертежами. Краткое описание чертежей Фиг.1 - представляет собой схематическое наглядное изображение системы формирования сейсмического изображения в соответствии с вариантом осуществления настоящего изобретения Фиг.2-4 - схематические вертикальные разрезы подповерхностного района, на которых отображены параметры,используемые для определения характеристик распространения в исследуемой среде сейсмических волн в соответствии с вариантом осуществления настоящего изобретения Фиг.5 - блок-схема, которая, схематически иллюстрирует способ обработки сейсмических данных в соответствии с вариантом осуществления данного изобретения Фиг.6 - диаграмма в трх измерениях, которая схематически отображает структуры данных,используемых в способе на фиг. 5 в соответствии с вариантом осуществления данного изобретения Фиг.7 А - представляет собой суммарный сейсмический разрез, полученный с использованием традиционного способа ввода кинематических поправок Фиг.7 В - суммарный сейсмический разрез,полученный с применением способа, основанного на оценке параметров фронта волны, в соответствии с предлагаемым вариантом осуществления данного изобретения Фиг.8 - блок-схема, которая схематически иллюстрирует способ комплексного кинематического анализа сейсмических трасс в соответствии с одним вариантом осуществления настоящего изобретения Фиг.9 - блок-схема, которая схематически иллюстрирует способ комплексного кинематического анализа сейсмических трасс в соответствии с другим вариантом осуществления настоящего изобретения Фиг.10 - представляет собой схематическое графическое отображение структуры данных,используемых в способе на фиг.9 в соответствии с вариантом осуществления настоящего изобретения и Фиг.11-схематическое графическое отображение структуры данных, используемых в другом способе комплексного кинематического анализа сейсмических трасс, в соответствии с вариантом осуществления настоящего изобретения. Детальное описание вариантов осуществления изобретения Фиг.1 представляет собой схематическое наглядное изображение предлагаемой в данном изобретении системы формирования сейсмического изображения 20 в соответствии с вариантом осуществления настоящего изобретения. Несколько источников 22 и приемников 24 сейсмических сигналов, расположенных в различных точках 26 на земной поверхности 28, перекрывают изучаемую подповерхностную зону. Обычно источники 22 представляют собой взрывные заряды, подрываемые в определенное время, а приемники (24) сейсмические датчики,которые формируют сейсмотрассы,показывающие амплитуду достигающих соответствующие точки 26 сейсмических волн в виде функции времени. Хотя для наглядности источники и приемник, показанные на фиг.1, расположены на одной линии (геометрия двухмерной сейсморазведки), система 20, обычно включает сеть источников и приемников,расположенных на участке земной поверхности, что позволяет вести как двухмерную так и трехмерную сейсморазведку. К примеру, как показано на фигуре,производимое источником 22 сейсмическое возбуждение (взрыв или механическое воздействие) создает волны с траекториями лучей 30,проникающие в толщу земной коры ниже поверхности 28. Эти волны отражаются от подповерхностной структуры 32, представляющей собой, например, границу между слоями различного состава. Отраженные волны с траекториями лучей 34 возвращаются к поверхности 28, где регистрируются приемниками 24. Время прохождения отраженной от данной структуры волны до каждого приемника различается, что обусловлено разным расстоянием до них, а также особенностями форм структуры 32 и промежуточных слоев, расположенных между структурой 32 и поверхностью 28. Процессор обработки сигналов 36 принимает формируемые приемниками 24 сейсмотрассы через соответствующий интерфейс 38. Этот интерфейс может быть сконструирован для управления образованием воздействующих и принятых сигналов от поверхности 28 в реальном масштабе времени, или альтернативно принимать записи сейсмотрасс от соответствующей аппаратуры регистрации данных (на схеме не показана). Процессор 36 обычно содержит многоцелевой компьютер с программным обеспечением,позволяющим выполнять описываемые в данном документе функции. Программное обеспечение может загружаться в компьютер в электронной форме, например по сетям связи, или с помощью материальных носителей данных (оптических,магнитных, электронных). Как вариант, для выполнения ряда функций процессора 36 можно использовать подходящий для этих целей цифровой сигнальный процессор(ЦСП) или другие специально предназначенные для этого или программируемые устройства. Процессор 36 обычно подключается к устройству отображения сейсмических данных и изображений, такому, как монитор 40. Кроме того, для удобства пользователя к нему могут подключаться устройства для ввода данных, такие, как клавиатура 42 и мышка 44. Для формирования сейсмического изображения района, расположенного ниже поверхности 28,процессор 36 обрабатывает сформированные на базе полученных от приемников 24 сейсмограмм суперсейсмограммы с помощью принципов теории гомеоморфного изображения. Суперсейсмограмма может включать сейсмограммы общего пункта взрыва (т.е. сформированные в результате использования одного источника), сейсмограммы общего пункта приема (т.е. сформированные одним приемником при использовании нескольких источников), и/или сейсмограммы, базирующиеся на ОСТ, как указывалось выше. Методы и правила,применяемые при формировании процессором изображений подповерхностных структур,объясняются ниже со ссылкой на фиг.2-4. Фиг.2 является схематическим видом в разрезе подземного района ниже поверхности 28, на котором отображено распространение в данной среде типовых сейсмических волн согласно варианту осуществления настоящего изобретения. На схеме показаны некоторые из параметров,используемые при вычислении кинематических поправок при исследовании структуры 32 для всех сейсмограмм суперсейсмограммы вокруг центральной точки Х 0. В данном варианте осуществления кинематические поправки вычисляются для произвольно выбранных источникаи приемника , расположенных на поверхности 28 на удалении - и Х соответственно от точки Х 0. Несмотря на то, что в этом варианте(также, как и в других вариантах осуществления изобретения этой заявки) для наглядности и простоты рассматривается двухмерное пространство-,однако принципы этого варианта осуществления изобретения позволяют непосредственно переходить к работе в трехмерном пространстве, которое в настоящее время обычно применяется для построения сейсмических изображений. Центральный луч 50 от точки Х 0 называется лучом, нормально падающим на структуру 32 в точке, обозначенной как 0 на фигуре. Луч 50 отражается от поверхности 28 и возвращается к ней под углом выхода 0 относительно нормали к поверхности. Сейсмический луч 52 из точкиотражается от структуры 32 в точке Р и возвращается как отраженный луч 54 в точку . В этом примере луч 52 пересекает луч 50 в точке . Таким образом, совокупность лучей 50, 52, и 54 может быть смоделирована в виде фокусирующей 5 волны, которая сходится от фронта 56 к точке ,затем отражается от структуры 32 и достигает поверхности 28 в виде расширяющегося фронта волны 58. Фронты волн 56 и 58 пересекают лучи 52 и 54 в точкахисоответственно. Лучи 52 и 54 являются частью суперсейсмограммы, которая состоит из множества сейсмограмм лучей, пересекающих луч 50, и имеющих соответствующие источники и приемники, расположенные по обеим сторонам от Подобная центральной точки Х 0. суперсейсмограмма может применяться, как это детально описывается ниже,в методике,используемой для определения значений параметров фронта волны вблизи центрального луча 5. Эта методика определяет реальные и виртуальные фокусы отражаемых от подповерхностных структур волн, поэтому называется в данном документе мультифокусировка . В качестве альтернативы для оценки данных параметров фронта волны могут применяться и другие методы. Если считать, что скорость распространения сейсмических волн в исследуемом районе одинакова, время распространения сейсмической волны вдоль лучей на сегментахи 0 будет равным, т.е. , так же, как время распространения на сегментахи Х 0 ОХ 0. Время распространения волны от источникадо приемникаможет быть выражено как(1) Первый член этого выражения, , равен времени прямого и обратного прохождения волны вдоль центрального (с нулевым смещением) луча 0. Временные поправкиимогут быть определены, исходя из приповерхностной скорости и характеристик центрального луча, о чем более подробно говорится ниже. Фиг.3 и 4 являются схематическими видами в разрезе приведенного на фиг. 2 подземного района,на которых показаны параметры фронта волны,используемые для вычисления местных кинематических поправок для данного региона согласно с вариантом осуществления настоящего изобретения. В процессе вычислений применяется гомеоморфная модель, описанная в упомянутом выше патенте США 5,103,429. В приведенных ниже вариантах осуществления изобретения эти параметры включают угол выхода 0, показанный на фиг.2, (который можно с таким же успехом назвать углом входа), радиус кривизны фронта волныдля отраженной от общего элемента отражения волны, показанный на фиг.3, и радиус кривизны фронта волныдля нормальной волны от общего эвольвентного элемента (,), показанный на фиг.4. Как показано на фиг.2-4, параметры 0,имеют непосредственное отношение к физическим характеристикам структуры 32. Как вариант, используемые для создания гомеоморфной модели фронты волн могут быть созданы в выражениях других угловых или радиальных параметров, что очевидно для специалистов в 6 данной области техники. Значения параметров фронта волны не известны заранее,но предпочтительно используются в качестве основы для параметрической модели подповерхностных структур. Значения параметров уточняются подгонкой данных фактических трасс к модели в процессе комплексного кинематического анализа,детально описываемого ниже. Как показано на фиг.3, отраженная от точки Р на структуре 32 волна образует фронт 60, который достигает поверхности 28.является радиусом круговой (или сферической) дуги 62, которая приблизительно равна фронту волны 60. Зависимость между данным радиусоми стандартной скоростью суммированиядля 2 данного района выражается формулой 0 , 20 где 0-средняя скорость распространения сейсмических волн у поверхности 28,0 - время распространения сейсмической волны вдоль сегмента Х 0 Р. Параметр сее, как показано на фиг.4, является радиусом круговой (или сферической) дуги 74,которая аппроксимируется фронту нормальной(СЕЕ) волны 72, распространяющейся от сегмента 70 структуры 32 к поверхности 28. Фронт волны СЕЕ 72 формируется нормальными лучами,излучаемыми из разных точек, расположенных на участке между точками а ина сегменте 70. Таким образом, параметры результирующего фронта 72 между соответствующими точками А и В определяются формой структуры 32. сее моделирует эту форму, определяя виртуальный центр излучения волны (0). Возвращаясь к равенству (1), условия коррекции времени могут быть выражены следующим образом с помощью геометрических параметров,приведенных на фиг.2 В этих выраженияхиявляются радиусами фронтов волн 56 и 58 соответственно,искоростями распространения сейсмических волн в приповерхностном слое в районе источника и приемника соответственно. Если принять приповерхностную скорость распространения за постоянную величину, т.е.0, равенства (2) и (3) можно объединить и представить в новом виде с использованием величин 0,и , что позволяет определить кинематические поправкидля лучей вокруг центральной точки Х 0. Приведенные ниже формулы разработаны и представлены Берковичем в работе Метод мультифокусировки для формирования гомеоморфного изображения и суммирования сейсмических данных( 0 )2 (0 )Параметр фокусировкизависит от положения точки , в которой лучи 52 или 54 пересекают центральный луч 50 (фиг.2). Этот параметр можно определить,используя значения радиусов следующим образом и изменить относительно медленно с изменением величин 0,и . Выбор параметраопределяет метод сортировки, применяемый для сейсмотрасс. Например, при Х 0 или -0, в соответствии с уравнением (7) 1 или -1 соответственно. Эти случаи соответствуют конфигурации с общим источником и общим примником. Промежуточные значенияможно вычислить, используя уравнения (5) и (6). является ассиметричным масштабным фактором, который определяется применяемой геометрией исследований. Он пропорционален функции распространения, где а - константа пропорциональности. Для данной конкретной сейсмограммы трасс вокруг центральной точки Х 0 значения величин Х и- известны как местонахождение от источника и приемника для каждой трассы, в то время как значения величин 0,иобусловлены неизвестными расположением и формой подповерхностных структур,отражающих сейсмические волны. Правильное сочетание значений величин 0,идолжно точно соответствовать данным сейсмотрасс в сейсмограмме в том смысле, что когда время смещено между трассами в сейсмограмме,коррекция происходит согласно этим величинам,трассы будут иметь высокую когерентность (т.е. взаимную корреляцию значений), т.к. отражения от структуры 32 должны быть выпрямлены во времени и в связи с этим коррелированными. Процессор 36 ведет поиск в множествах комбинаций величин 0, ис Х 0, Х и - во всей суперсейсмограмме, используя процесс, именуемый в данном документе комплексный кинематический анализ , целью которого является поиск комбинаций, оптимально подходящих для всех сейсмотрасс. Итоговая карта величин 0,ихарактеризует расположение и форму структуры 32, а также других структур в исследуемом подповерхностном районе. Детально этот процесс описывается ниже. Хотя приведенные выше связанные с мультифокусной моделью вычисления и описываемые ниже методы относятся к сейсмограммам ОГТ (ОСТ) вокруг центральной точки Х 0, приведенные в этом документе методы точно так же могут применяться,(внеся необходимые изменения), для обработки других видов сейсмограмм. Например, уравнение(4) и связанные с ним определения параметров могут быть сформулированы и для сейсмограмм или сейсмотрасс, получаемых с использованием общего пункта возбуждения (ОПВ) или общего пункта приема (ОПП). Данное изобретение предполагает возможность реализации таких альтернативных подходов. Описанный выше метод мультифокусировки позволяет определить однозначную взаимосвязь между параметрами фронта волны и характеристиками подповерхностных отражающих структур. Альтернативно для вычисления приведенных выше параметров, для целей оптимального суммирования сейсмограмм, могут применяться другие аппроксимирующие выражения и формулы. Некоторые из таких альтернативных способов могут рассматриваться в качестве частных случаев описываемого здесь способа. Например, Кира-Олива и др. приводят следующую формулу для расчета кинематических поправок в работе Получение двухмерного среза методом общей отражающей поверхности при нулевом отклонении в условиях сглаженного рельефа (-. 2-231(2005), страницы 1-18), которая приводится здесь в качестве ссылки уравнение (8) где -время отражения, 0 - время пробега по нормальному лучу,0 - угол выхода нормального луча,- координата средней (глубинной) точки, х 0- координата центральной точки, 0 - местная кривизна земной поверхности в точке на линии сейсмической съемки,-половина удаления(нормального) фронта волны, и- радиус кривизны в х 0 условного фронта волны в(точке нормального падения). Если переменным величинам в уравнении (4) присвоить соответствующие обозначения, применяемые в мультифокусном моделировании (сее,,,01), а уравнение (4) преобразовать в ряды Тейлора, то становится очевидно, что уравнение (8) является просто гиперболической аппроксимацией уравнения (4). Еще одна формула вычисления кинематических поправок приводится в работе Хертвека и др. Суммирование данных на удалении от ОСТ (ОГТ) Если преобразовать переменные величины в уравнение также становится гиперболической аппроксимацией уравнения (4). Теперь обратимся к фиг. 5 и 6, которые схематически иллюстрируют способ обработки сейсмических данных в соответствии с вариантом осуществления настоящего изобретения. Фиг.5 представляет собой блок-схему, которая показывает основные этапы способа, а фиг.6 является диаграммой в трх измерениях, которая отображает структуры данных, используемых в способе на фиг.5. Этот способ применяется для обработки двухмерных (2) сейсмических данных,т.е. данных, собранных с использованием источников и приемников, которые размещены на одной прямой. В практической работе для получения трехмерной карты подповерхностных слоев можно обрабатывать таким методом несколько двухмерных срезов, полученных с помощью источников и приемников,расположенных по нескольким различным прямым. Как вариант, описываемый ниже способ может быть адаптирован для полномасштабной регистрации и обработки трехмерных сейсмических данных за счет добавления дополнительных параметров фронта волны, включая поперечные углы и радиусы по трем направлениям. В этом случае показанные на фиг.6 и описанные ниже трехмерные матрицы будут заменены многомерными, имеющими более трех измерений. Реализация представленного на фиг.5 и 6 способа включает получение множества сейсмотрасс на этапе сбора данных - этап 80. Трассы могут быть собраны, например, с использованием системы, показанной на фиг.1, или с помощью любых других подходящих средств сбора сейсмических данных. Как уже говорилось выше, из сейсмотрасс формируется суперсейсмограмма 82. Для анализа данных на этапе определения общей эволюты СЕЕ 84 определяется диапазон возможных значений для 1 2 радиуса сее. Формально,,,,,гдечисло различных тестируемых радиусов. Для каждого значенияпроцессор 36 вычисляет значения меры когерентности из числа сейсмотрасс вокруг каждой центральной точки 0 для различных величин блока параметров 0,и 0 на этапе вычисления меры когерентности 86. Иными словами, на каждный момент времени 0, процессор берет различные комбинации значений величин 0 ив пределах определенного для них диапазона 1 2 соответствующие номера значений параметров,8 проверяемых для различных значений . Каждая(,,) вычисления соответстующей кинематической поправки для каждой сейсмотрассы суперсейсмограммы относительно 0,как определяется выражением (4) с использованием формул (5), (6) и (7). Затем вычисляют меру когерентностидля всех сейсмотрасс относительно центральной трассы, для каждой 1, 2,число сейсмотрасс в суперсейсмограмме. Таким образом, для каждого сочетания трех величин значения 0, процессор 36 определяет одно соответствующее значение меры когерентности. Эти значения мер когерентности могут вводиться в кубы данных 88, каждый из которых соответствует своему значению. Кубы данных 88 имеют элементы матрицы, включающие значения меры когерентности (0, , 0) для соответствующих. Как показано на фиг.6, осями этих кубов являются 0, сге 0, а их количество, как определено выше, равно . Другими словами,каждый куб является трехмерной матрицей, в которой одно измерение соответствует времени распространения 0, и остальные два - параметрам фронта волны 0 и сге. Как вариант, значения меры когерентности могут содержаться в одной четырехмерной матрице, или в нескольких кубах данных,измерения которых соответствуют различным упомянутым выше группам параметров фронта волны. В каждом кубе данных имеющие высокие значения меры когерентности точки (0, , 0) могут соответствовать реальным точкам на структуре 32 и других отражающих сейсмические волны подземных слоях. Однако другие точки с высокой мерой когерентности могут оказаться помехой,возникающей,например,из-за множественных отражений между различными слоями. Для корректного картирования подземных слоев необходим правильный выбор и группирование точек с высокой мерой когерентности при одновременном устранении помех. Для облегчения выбора необходимых точек в кубах 88 на этапе консолидации меры когерентности 90 процессор 36 находит значения для пары (0, ), дающие максимальные значения меры когерентности на каждое значение 0 через все значения . Таким образом, процессор объединяет значения дающие максимальное значениедля каждого значения 0 пары (0 ,) , формируя при этом единый результирующий куб 92, содержащий значения( 0 ,, 0 ). Процессор 36 разделяет куб 92 на двухмерные матрицы 96, 98 и 100 (этап разделения 94). Эти матрицы характеризуются как следующие Матрица 96, 1, 0 , формируется путем выделения максимальных значений меры когерентности по оси 0 . Матрица 100,2, 0 , формируется путем выделения максимальных значений меры когерентности по оси. 3(0 ),(0 ), формируются путем выделения срезов (сечений) значений меры когерентности для множества различных значений 0, обозначаемых как 0 для 0 М. Матрицы 96, 98 и 100 используют в процессе комплексного кинематического анализа для нахождения группы максимальных значений меры когерентности соответствующих действительным отражениям от подповерхностных структур на этапе комплексного кинематического анализа 102. Этот этап может осуществляться автоматически процессором 36, или в интерактивном режиме с участием пользователя системы 20. Описание автоматического и интерактивного методов работы на этапе 102 приводятся ниже, в комментариях к фиг. 8 и 9. Используя установленные в ходе этапа 102 максимальные значения, процессор 36 выравнивает и интегрирует сейсмотрассы в суперсейсмограмму, формируя полное двух- или трехмерное изображение подповерхностных структур исследуемого района. Изображение обычно представляет собой состояние слоев,расположенных под каждой центральной точкой на поверхности 28. Специальные технологии,применяемые при формировании такого рода изображений, базируются на анализе фронта волны и описываются в упоминавшейся выше докторской диссертации Берковича. Теперь обратимся к фиг.7 А и 7 В, на которых приведены суммарные сейсмические разрезы (стеки,), т.е. срезы трехмерного изображения подповерхностного района, базирующиеся на данных обработки сейсмотрасс, которые были собраны с использованием системы, похожей или аналогичной изображенной на фиг.1. Фиг. 7 А показывает разрез полученный традиционно используемым способом нормальных кинематических поправок и суммирования трасс. Фиг.7 В показывает разрез,полученный с применением предлагаемого данным изобретением способа, включающего расчет параметров с использованием принципов теории гомеоморфного изображения, и комплексного кинематического анализа. На фиг.7 В показано значительно больше структурных деталей, чем на фиг.7 А. Процессор 36 обеспечивает такой превосходный результат благодаря тому, что он обрабатывает всю суперсейсмограмму, как это было разъяснено выше,применяя при этом более точные,негиперболические кинематические поправки,использующие параметры,связанные с направлением распространения фронта волны,скоростью распространения волны в подповерхностной среде и кривизной отражающих структур. Фиг. 8 представляет собой блок-схему, которая схематически иллюстрирует способ комплексного кинематического анализа сейсмических трасс в соответствии с одним вариантом осуществления настоящего изобретения,который может применяться на этапе 102. При данном способе используются двухмерные матрицы 98(или матрицы с большим 3(0 ),(0 ),числом измерений, которые сводятся к этой форме). Для каждого значения 0 на этапе нахождения максимальных значений 110 процессор 36 находит значения пари , которые дают максимальное значение меры когерентности. Затем на этапе группировки 112 процессор группирует вместе смежные максимальные значения. Другими словами, если отдельные максимальные значения в функции меры когерентности являются близкими величинамии , то процессор делает вывод,что они принадлежат одной волне, т.е. относятся к отражениям от одного и того же подповерхностного слоя. Для того, чтобы определить, группировать ли пару смежных максимальных значений, процессор оцениваети, которые являются разницей между соответствующими значениями величини в сходных максимумах. Если одна из этих разниц превышает предварительно установленное пороговое значение,или, то процессор делает вывод, что соответствующие максимальные значения относятся к разным волнам. Пороговые значенияиопределяются эмпирическим путем. После идентифицирования различных максимальных значений процессор 36 сортирует значения мер когерентности в порядке убывания (на этапе сортировки 114). Наибольшее значение меры когерентности соответствует волне с наибольшей корреляцией. Значение трех величин (0, сге, сее) при таком максимуме определяет соответствующую кинематическую поправкудля каждой сейсмотрассы в суперсейсмограмме в соответствии с уравнением (4), как это представлено выше. Используя значения этих поправок, процессор производит выравнивание трасс вокруг соответствующей центральной точки Х 0 (на этапе выравнивания сейсмотрасс 116). Сумма выравненных трасс дает амплитуду центральной трассы для временной выборки 0. Точно так же процессор может выравнивать и суммировать трассы с использованием значений кинематических поправок, определяемых другими максимумами,превышающими установленное пороговое значение,и/или определенным количеством максимумов,отсортированных в порядке убывания. Для того,чтобы сформировать полный сейсмический разрез,процессор повторяет описанную выше процедуру для всех значений 0 и всех центральных точек Х 0. Теперь рассмотрим фиг.9 и 10, схематически представляющие интерактивный способ 9 комплексного кинематического анализа, который может применяться на этапе 102 в соответствии с другим вариантом осуществления настоящего изобретения. Фиг.9 является блок-схемой,показывающей этапы способа в соответствии с другим вариантом осуществления настоящего изобретения, а фиг. 10 представляет собой схематическое графическое отображение структур данных, используемых при осуществлении способа. Начиная осуществление способа, процессор 36 рассчитывает матрицы 1, 2 и 3 (обозначенные на фигурах как матрицы 96, 100 и 98 соответственно) для определенного числа основных центральных точек на этапе расчта матриц. Основные центральные точки для этой процедуры могут выбираться пользователем, или определяться процессором автоматически и, как правило, они совпадают с координатами центральных точек,используемых при стандартной обработке данных. Результирующие матрицы для конкретной центральной точки Х 0 показаны в шкале серых тонов на фиг. 10, где значению меры когерентности в каждой точке соответствует определенная яркость изображения. Горизонтальные пунктирные линии на изображениях соответствуют определенному выбранному значению 0, которое является значением 0, использованным для формирования матрицы 98. Вертикальные пунктирные линии на матрицах 96 и 100 соответствуют местоположениямидля одного из максимальных значений(яркое пятно). Для удобства восприятия и понимания матрица 96 может быть преобразована в значениях скорости,например, скорости при суммировании по ОГТ на этапе пересчета матрицы 122. Для этой цели матрица меры когерентности 1 пересчитывается как 1(,0) с использованием, например,2 приведенной выше формулы 0 . Таким 20 образом, новая матрица 1 будет показывать изменения скорости во времени. На этапе выбора скорости 124 пользователь выбирает максимальное значение меры когерентности в матрице 1, в основном, процессор 36 представляет соответствующее виду матрицы 96 графическое изображение (как показано на фиг. 10) на экране дисплея 40. С помощью клавиатуры 42 и/или мышки 44 пользователь может ввести команды, выявляющие коридоры максимальных значений на дисплее, такие, как изогнутая наклонная линия ярких точек в матрице 96,показанная на фиг. 10. Эти коридоры отображают последовательности оптимальных значений(или,что эквивалентно, се) для соответствующих им значений 0. Устойчивая последовательность максимальных значений в такого рода коридоре позволяет пользователю легко его выявить и определить его форму. Устойчивая последовательность согласованных максимальных значений достоверно указывает на то, что они соответствуют не помехам, а реальным отражениям от последовательных, примерно параллельных 10 подземных слоев. Как упоминалось выше,пользователь определяет такие коридоры для определенных, основных точек, а затем процессор может определить соответствующие коридоры для других центральных точек с помощью интерполяции. Для того, чтобы обеспечить выбор оптимального значения се для каждого значения 0, процессор 36 может использовать соответствующую матрицу 98( 3(0 ),(0 на этапе выбора радиуса 128. Этот этап позволяет процессору выбрать оптимальное значение в пределах коридора,определенного на этапе 124. В приведенном на фиг.10 примере, оптимальное значение се будет соответствовать центру яркой точки по вертикальной оси матрицы 98. Аналогичным образом на этапе выбора угла 130 пользователь может определить оптимальные значения 0 для соответствующих значений 0 и. Для этого процессор 36 выводит на экран матрицу 100 (2, 0 ), и пользователь может выявить коридоры на экране дисплея так же,как на этапе 124. На фиг. 10 можно четко увидеть коридор в матрице 100. Аналогичным образом можно использовать матрицу 98, как на этапе 128 для подтверждения лучшего выбора 0. На этапе согласования сейсмотрасс 134 процессор 36 рассчитывает значения необходимых кинематических поправок, используя выбранные значения 0 идля каждого 0, а затем с их помощью производит выравнивание сейсмотрасс вокруг соответствующей центральной точки Х 0. Этот этап выполняется аналогично этапу 116, как это описано выше, и точно так же для формирования полного сейсмического разреза процедура повторяется для всех значений 0 и для всех центральных точек Х 0. Фиг.11 представляет собой схематическое графическое отображение структуры данных,используемых в другом способе комплексного кинематического анализа сейсмических трасс, в соответствии с вариантом осуществления настоящего изобретения. В отличие от описанных выше способов анализа, представляющих собой кинематический анализ параметров формы волны(, се, сее, и т.п.) по оси времени (0), фиг. 11 иллюстрирует анализ сейсмических данных по пространственному горизонту 140. Этот горизонт(выбираемый автоматически или пользователем системы 20) должен соответствовать отражающей подповерхностной структуре. Для значений координат по осипо горизонту 140 процессор формирует куб данных 88, а затем выделяет матрицы значений меры когерентности 142 и 144 для определения максимального значения се (или скорости) и , соответственно. Эти максимальные значения затем используются для отбора отражающихся от изучаемого горизонта волн. Хотя описанные выше фигуры и способы касаются применения специфических методик проведения комплексного кинематического анализа для идентификации, выделения, сортировки и использования максимальных значений функции когерентности, для выполнения этих задач при обработке сейсмических данных могут аналогичным образом применяться другие автоматические и интерактивные методики кинематического анализа,которые также включены в объем настоящего изобретения. Например, для поиска максимальных значений можно применять другие функции когерентности, такие, как функции корреляции или критерий Стьюдента. Поэтому в данной заявке на патент и в формуле изобретения ссылки на меру корреляции следует понимать как включающие в себя как меру когерентности, так и все другие применимые функции корреляции и когерентности. В вычислениях описанных выше параметров могут использоваться и другие аппроксимации формул(2)-(7). Кроме того, приведенные выше методики могут применяться для обработки минимальных суперсейсмограмм, включающих только одну сейсмограмму ОСТ (ОГТ), одну сейсмограмму общего пункта возбуждения или одну сейсмограмму общего пункта приема. Кроме того, хотя описанные выше методы относятся к обработке сейсмических данных и изображений подповерхностных структур,принципы настоящего изобретения могут так же применяться для формирования изображений любой другой неоднородной среды, например, при томографии или в других неразрушающих способах контроля и испытаний. Применяемые для обработки сейсмических данных перечисленные выше параметры могут также использоваться в сейсмической томографии,(методы амплитуда как функция удаления), определении статических поправок (поправки за малоглубинный слой и др.) и т.п. Должно быть принято во внимание, что описанные выше варианты осуществления изобретения приведены в качестве примера, и что настоящее изобретение не ограничено только тем,что было показано и описано выше. Точнее объем данного изобретения включает в себя как комбинации, так и подкомбинации различных описанных выше признаков, таких как их варианты и модификации, которые могут возникнуть у опытных специалистов в данной отрасли после прочтения изложенного выше описания, и которые не раскрыты в известном уровне техники. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Компьютерный способ обработки данных,включающий получение массива сейсмических трасс,соответствующих сигналам,полученным за определенный период времени от множества точек в результате отражения сейсмических волн от подповерхностных структур,вычисление меры корреляции для трасс в виде функции блока параметров фронта волны, которые определяют соответствующие кинематические поправки, введенные для выравнивания трасс, формирование матрицы, имеющей, по меньшей мере, три элемента, из которых один элемент соответствует времени распространения сейсмических волн, и, по меньшей мере, два элемента соответствуют, по меньшей мере, двум параметрам фронта волны соответственно, и элементы матрицы включают вычисленную меру корреляции,идентификацию с использованием матрицы значений параметров фронта волны, которые обеспечивают максимальную меру корреляции для каждого из множества значений времен распространения соответственно и формирование сейсмического изображения подповерхностных структур путем выравнивания и суммирования сейсмотрасс с использованием кинематических поправок,которые были определены как идентификационные значения параметров фронта волны,отличающийся тем, что параметры фронта волны включают угол выхода и соответствующие радиусы кривизны фронта волны общего отражнного элемента и общего эволютного элемента, отходящие от отражающей поверхности подземного слоя. 2. Способ по п.1, отличающийся тем, что получение массива сейсмотрасс включает получение суперсейсмограммы,включающей множество сейсмограмм трасс,имеющих соответственно различные источники и приемники,расположенные по двухмерной или трехмерной геометрии получения сигнала, и идентификация значений величин включает обработку меры корреляции,вычисленной для множества сейсмограмм для идентификации значений параметров фронта волны, которые обеспечивают максимальную меру корреляции. 3. Способ по п.2, отличающийся тем, что получение суперсейсмограммы включает выбор множества сейсмограмм, каждая из которых состоит из соответствующего массива сейсмотрасс,полученных с помощью использующих различную геометрию получения сигнала источников и приемников, и формирование сейсмического изображения подповерхностных структур включает компьютерную обработку соответствующих сейсмических изображений в двух или в трх измерениях соответствующих сейсмотрасс. 4. Способ по п.1, отличающийся тем, что кинематические поправки определяют аппроксимацией,выбираемой из группы аппроксимаций, состоящей из гиперболических,негиперболических и параболических аппроксимаций. 5. Способ по п.1, отличающийся тем, что идентификация значений величин включает формирование множества многомерных матриц,каждая из которых включает, по меньшей мере, три элемента и содержит вычисленную меру корреляции для различных соответствующих значений радиуса общего эволютного элемента, и объединение множества многомерных матриц для формирования результирующей многомерной матрицы, для 11 которой, по меньшей мере, два элемента включают первый элемент, соответствующий углу выхода, и второй элемент, соответствующий радиусу общего отраженного элемента. 6. Способ по п.5, отличающийся тем, что объединение множества многомерных матриц включает ввод в элементы результирующей многомерной матрицы вычисленной компьютером меры корреляции, которая является максимальной по отношению к соответствующим элементам в множестве многомерных матриц. 7. Способ по п.5, отличающийся тем, что идентификация значений величин включает разрезание результирующей многомерной матрицы для получения множества двухмерных матриц, и выявление максимального значения вычисленной меры корреляции в двухмерных матрицах. 8. Способ по п. 5, отличающийся тем, что, по меньшей мере, два параметра фронта волны включают в себя угловой параметр и, по меньшей мере, один параметр кривизны фронта волны и параметр скорости. 9. Способ по п.1, отличающийся тем, что идентификация значений величин включает нахождение одного или более соответствующих максимальных значений вычисленной меры корреляции для каждого времени распространения,а выравнивание сейсмотрасс включает в себя выравнивание сейсмотрасс в соответствии со значениями параметров фронта волны,представляющих собой соответствующие максимальные значения. 10. Способ по п.9, отличающийся тем, что выявление одного или более соответствующих максимальных значений включает сортировку максимальных значений в порядке, определяемым вычисленной мерой корреляции на каждом максимальном значении. 11. Способ по п.1, отличающийся тем, что идентификация значений величин включает отображение на дисплее данных, показывающих вычисленную меру корреляции в виде функции времени распространения и, по меньшей мере,одного из параметров фронта волны, и ввод данных пользователем, который идентифицирует один или более максимальных значений вычисленной меры корреляции. 12. Способ по п.11, отличающийся тем, что получение введенных данных включает получение выбранного пользователем коридора значений,содержащего множество максимальных значений различных времн распространения и соответствующие значения, по меньшей мере,одного из параметров фронта волны. 13. Способ по п.12, отличающийся тем, что максимальные значения величин в коридоре соответствуют волнам,отражаемым от соответствующих последовательных подземных слоев. 14. Способ по п.1, отличающийся тем, что включает определение пространственного горизонта в районе, для которого формируется сейсмическое изображение, и идентификацию с использованием 12 матрицы значений параметров фронта волны,приводящих к максимальному значению меры корреляции для каждого из множества местоположений по пространственному горизонту соответственно. 15. Компьютерный способ обработки данных,включающий получение массива сейсмических трасс,соответствующих сигналам,полученным за определенный период времени от множества точек в результате отражения сейсмических волн от подповерхностных структур,вычисление меры корреляции для трасс в виде функции блока параметров фронта волны, которые определяют соответствующие кинематические поправки, введенные для выравнивания трасс,формирование матрицы, имеющей, по меньшей мере, три элемента, из которых один элемент соответствует времени распространения сейсмических волн, и, по меньшей мере, два элемента соответствуют, по меньшей мере, двум параметрам фронта волны соответственно, и элементы матрицы включают вычисленную меру корреляции,идентификацию с использованием матрицы значений параметров фронта волны, которые обеспечивают максимальную меру корреляции для каждого из множества значений времен распространения соответственно и формирование сейсмического изображения подповерхностных структур путем выравнивания и суммирования сейсмотрасс с использованием кинематических поправок,которые были определены как идентификационные значения параметров фронта волны,отличающийся тем, что выявление одного или более соответствующих максимальных значений включает группировку максимальных значений для каждого из тех времен распространения, для которых соответствующие величины значений параметров фронта волны различаются не более,чем на предварительно заданную пороговую величину, как соответствующие одной волне, при этом осуществляют идентифицирование максимальных значений, для которых значения параметров фронта волны отличаются более чем на установленную пороговую величину,как соответствующие разным волнам, а выравнивание сейсмотрасс включает выравнивание сейсмотрасс в соответствии со значениями параметров фронта волны, по меньшей мере, одной из разных волн. 16. Устройство для обработки данных,содержащее интерфейс, который объединяет получение массива сейсмических трасс, соответствующих сигналам, полученным за определенный период времени от множества точек в результате отражения сейсмических волн от подповерхностных структур,и процессор обработки сигналов,который сконфигурирован с возможностью вычисления меры корреляции для трасс в виде функции блока параметров фронта волны, которые определяют соответствующие кинематические поправки,введенные для выравнивания трасс, формирования матрицы, имеющей, по меньшей мере, три элемента,из которых один элемент соответствует времени распространения сейсмических волн, и, по меньшей мере, два элемента соответствуют, по меньшей мере,двум параметрам фронта волны соответственно, и элементы матрицы включают вычисленную меру корреляции, идентификации с использованием матрицы значений параметров фронта волны,которые обеспечивают максимальную меру корреляции для каждого из множества значений времен распространения соответственно и формирования сейсмического изображения подповерхностных структур путем выравнивания и суммирования сейсмотрасс с использованием кинематических поправок, которые были определены как идентификационные значения параметров фронта волны,отличающееся тем, что процессор обработки сигналов сконфигурирован таким образом, что параметры фронта волны включают угол выхода и соответствующие радиусы кривизны фронта волны общего отражнного элемента и общего эволютного элемента, отходящие от отражающей поверхности подземного слоя. 17. Устройство по п.16, отличающееся тем, что выполнено с возможностью получения массива сейсмотрасс,которое включает получение суперсейсмограммы,включающей множество сейсмограмм трасс, имеющих соответственно различные источники и приемники, расположенные по двухмерной или трехмерной геометрии получения сигнала, а идентификации значений величин, которая включает обработку меры корреляции,вычисленной для множества сейсмограмм,для идентификации значений параметров фронта волны, которые обеспечивают максимальную меру корреляции. 18. Устройство по п.16, отличающееся тем, что выполнено с возможностью определения кинематических поправок аппроксимацией,выбираемой из группы аппроксимаций, состоящей из гиперболических,негиперболических и параболических аппроксимаций. 19. Устройство по п.16, отличающееся тем, что,по меньшей мере, два параметра фронта волны включают в себя угловой параметр и, по меньшей мере, один параметр кривизны фронта волны и параметр скорости. 20. Устройство по п.16, отличающееся тем, что процессор обработки сигналов сконфигурирован с возможностью нахождения одного или более соответствующих максимальных значений вычисленной меры корреляции для каждого времени распространения,и выравнивания сейсмотрасс в соответствии со значениями параметров фронта волны, представляющих собой соответствующие максимальные значения. 21. Устройство по п.16, отличающееся тем, что процессор обработки сигналов сконфигурирован с возможностью отображения на дисплее данных,показывающих вычисленную меру корреляции в виде функции времени распространения и, по меньшей мере, одного из параметров фронта волны,и ввода данных пользователем,который идентифицирует один или более максимальных значений вычисленной меры корреляции. 22. Программный продукт для компьютеров,содержащий машиночитаемый носитель, на котором команды управления программой сохранены и считывание которых компьютером обусловливает возможность компьютеру получения массива сейсмических трасс, соответствующих сигналам,полученным за определенный период времени от множества точек в результате отражения сейсмических волн от подповерхностных структур,вычисления меры корреляции для трасс в виде функции блока параметров фронта волны, которые определяют соответствующие кинематические поправки, введенные для выравнивания трасс,формирования матрицы, имеющей, по меньшей мере, три элемента, из которых один элемент соответствует времени распространения сейсмических волн, и по меньшей мере два элемента соответствуют, по меньшей мере, двум параметрам фронта волны соответственно, и элементы матрицы включают вычисленную меру корреляции,идентификации с использованием матрицы значений параметров фронта волны, которые обеспечивают максимальную меру корреляции для каждого из множества значений времен распространения соответственно и формирования сейсмического изображения подповерхностных структур путем выравнивания и суммирования сейсмотрасс с использованием кинематических поправок,которые были определены как идентификационные значения параметров фронта волны,отличающийся тем, что параметры фронта волны включают угол выхода и соответствующие радиусы кривизны фронта волны общего отражнного элемента и общего эволютного элемента, отходящие от отражающей поверхности подземного слоя.
МПК / Метки
МПК: G01V 1/28, G01V 1/00, G01V 1/20, G01V 1/36
Метки: способ, осуществления, программный, сейсмических, продукт, компьютерный, устройство, данных, обработки
Код ссылки
<a href="https://kz.patents.su/19-26526-kompyuternyjj-sposob-obrabotki-sejjsmicheskih-dannyh-ustrojjstvo-dlya-ego-osushhestvleniya-i-programmnyjj-produkt.html" rel="bookmark" title="База патентов Казахстана">Компьютерный способ обработки сейсмических данных, устройство для его осуществления и программный продукт</a>
Способ учета растяжения сейсмического импульса в сейсмических данных (варианты)
Номер патента: 24632
Опубликовано: 15.09.2011
Авторы: ДАРРАНИ, Джавайд, А., АННО, Фил, Д., БОМЕЛ, Роберт, Т.
МПК: G01V 1/36
Метки: сейсмических, учета, растяжения, варианты, способ, сейсмического, импульса, данных
Формула / Реферат:
Реализуемый с помощью компьютера способ учета зависимого от угла растяжения сейсмического импульса в сейсмических данных на основе новой взаимозависимости между растяжением сейсмического импульса и косинусом угла отражения акустического луча. Обращаются к обычным сейсмическим данным, имеющим, по меньшей мере, один сейсмический импульс, таким как данные, генерируемые в результате сейсморазведки способом отраженных волн. Данные обрабатывают таким...
Способ обработки блоков данных в системе мобильной связи (варианты) и устройство для его осуществления
Номер патента: 19890
Опубликовано: 20.12.2011
Авторы: ЧХУН, Сунг-Дук, ЫЙ, Сён-Джун, ЛИ, Ён-Дэ
МПК: H04B 7/005
Метки: способ, варианты, связи, устройство, обработки, мобильной, блоков, осуществления, данных, системе
Формула / Реферат:
Способ обновления данных о следующем ожи-даемом порядковом номере передачи (NET) и положения окна получателя для обеспечения пос-тоянного попадания NET в область окна получателя, чтобы предотвратить нежелательные задержки в доставке информационных блоков и избежать состояние останова и обеспечить возможность высокоскоростной передачи данных в системе высокоскоростного пакетного доступа по нисходящему каналу (PSDPA).
Способ наблюдения за разрабатываемым месторождением полезного ископаемого (варианты), способ установки приборов под поверхностью земли, прибор для приема сейсмических данных, комплекс средств для сбора сейсмической информации, комплекс средств для установки приборов под поверхностью земли
Номер предварительного патента: 6425
Опубликовано: 15.07.1998
Авторы: Хэвиг, Свен О.
МПК: G01V 1/28
Метки: способ, земли, прибор, информации, приборов, наблюдения, месторождением, сбора, ископаемого, сейсмических, разрабатываемым, данных, средств, установки, варианты, поверхностью, сейсмической, приема, комплекс, полезного
Формула / Реферат:
Способ наблюдения за промышленным месторождением полезного ископаемого включает постоянную установку геофона в буровой скважине; генерирование первой серии сейсмических волн, получение первой серии сейсмических данных с помощью геофона, запись первой серии данных указанного приема первой серии сейсмических данных, генерирование второй серии сейсмических волн по прохождении достаточно большого промежутка времени для изменения состояния...
Cпособ обработки данных для системы беспроводной связи (варианты) и приемное устройство для его осуществления
Номер патента: 19345
Опубликовано: 15.11.2012
Авторы: ЧУН, Санг-Дак, ЛИ, Ёнг-Даэ, ЫЙ, Сён-Джун
МПК: H04B 7/26
Метки: беспроводной, приемное, устройство, осуществления, обработки, связи, данных, системы, cпособ, варианты
Формула / Реферат:
Предлагаются способ и устройство для обработки данных в приемном устройстве системы беспроводной связи. Способ обработки данных использует приемное устройство, содержащее уровень управления доступом к среде «MAC» и уровень управления радиоканалом «RLC» для обработки блоков данных. Обработка данных включает передачу блока данных и результата проверки циклического избыточного кода «CRC», связанного с этим блоком данных, переданным из уровня...
Способ прогнозирования количественных значений свойств скальной породы или текучей среды в продуктивном пласте с помощью сейсмических данных
Номер патента: 14040
Опубликовано: 15.11.2006
Авторы: Стефен Д. Уилсон, Джефри Дж. Хамман, Дональд Х. Колдуэлл
МПК: G06F 19/00, G01V 1/00
Метки: пласте, продуктивном, помощью, сейсмических, данных, среды, свойств, количественных, скальной, текучей, породы, способ, прогнозирования, значений
Формула / Реферат:
Изобретение относится к области горного дела, в частности, к геологии и может быть использовано при анализе свойств горных пород. Технический результат изобретения - прогнозирование количественных значений свойств скальных пород и текучих сред в продуктивном пласте. Предложен способ (фиг. 1) для прогнозирования значения установленного свойства скальной породы или текучей среды в подземном геологическом объеме (10). Экспериментально определенное...
Предыдущий патент: Термостатический вентиль
Следующий патент: Способ быстрого трехфазного повторного включения линий электропередач с поперечной компенсацией
Случайный патент: Низкооборотный генератор постоянного тока